基于条件数加权的高光谱遥感影像丰度估计方法及装置
1.本发明涉及高光谱解混技术领域,具体涉及一种基于条件数加权的高光谱遥感影像丰度估计方法及装置。
背景技术:
2.高光谱遥感影像信息空间分辨率的限制以及复杂地物的影响,图像中出现大量混合像元,即一个像元同时包含几个地物的光谱信息。若一个像元只包含一种地物,则该像元称之为端元。高光谱解混主要包括端元提取和丰度估计,即确定组成混合像元的地物种类以及确定各个种类所占的比例。
3.现有的高光谱遥感影像丰度估计的方法主要是采用全约束的最小二乘方法,但是此方法在处理含有噪声的数据时,丰度估计的误差较大,解混的精度会降低。
技术实现要素:
4.为了解决全约束的最小二乘法估计丰度误差较大、解混精度低的技术问题,本发明采取的技术方案是,提供了一种基于条件数加权的高光谱遥感影像丰度估计方法及装置。
5.根据本发明的一个方面,提供了一种基于条件数加权的高光谱遥感影像丰度估计方法,包括以下步骤:
6.获取高光谱数据矩阵和端元数据矩阵;
7.使用双正交小波对所述高光谱数据矩阵进行小波包分解,得到高光谱数据矩阵对应的小波包树;
8.使用双正交小波对所述端元数据矩阵进行小波包分解,得到端元数据矩阵对应的小波包树;
9.获取所述端元数据矩阵对应的小波包树每个节点处的系数矩阵;
10.计算每个所述系数矩阵的条件数;
11.根据每个所述条件数计算每个节点的权重;
12.将每个节点对应的高光谱数据矩阵和端元数据矩阵作为最小二乘法的输入,将每次最小二乘法输出的结果乘以对应节点的权重得到该节点对应的结果,最后对每个节点对应的结果进行求和得到丰度估计结果。
13.优选地,所述对使用双正交小波高光谱数据矩阵进行小波包分解,得到高光谱数据矩阵对应的小波包树的步骤,包括:
14.所述高光谱数据矩阵的大小为x
×y×
z,其中,x和y是图像数据,z是波长;
15.使用双正交小波对所述高光谱数据矩阵进行小波包分解时,每次分解1
×1×
z的数据,分解完成后,得到x
×
y个小波包树;
16.每个节点对应的高光谱数据矩阵的大小为k
×
1,其中,k由分解的层数和选取的小波包类型确定。
17.优选地,所述使用双正交小波对所述端元数据矩阵进行小波包分解,得到端元数据矩阵对应的小波包树的步骤,包括:
18.所述端元数据矩阵为z
×
e,其中z是波长,e是端元的个数,每个z
×
1的向量代表一种地物的光谱数据;
19.使用双正交小波分别对e个z
×
1的光谱数据进行a层小波包分解,得到e个小波包树,每个小波包树有个节点;
20.将e个小波包树对应节点的数据重新组合成k
×
e的系数矩阵,其中k由分解的层数和选取的小波包类型确定。
21.优选地,所述根据条件数计算每个节点的权重的步骤,包括:
22.定义初始权重计算函数:yi=(x
i-m)n;
23.其中m是最大的条件数,n是一个可调参数,n越大则表示条件数越大的矩阵所占的权重会越低,xi表示第i个节点的系数矩阵,yi表示第i个节点的初始权重;
24.根据所述初始权重计算函数,计算得到每个节点对应的初始权重yi;
25.对所有的yi进行归一化处理得到最后的权重,即其中wi是每个节点对应的权重。
26.根据本发明的另一方面,还提供了一种基于条件数加权的高光谱遥感影像丰度估计装置,包括以下模块:
27.获取模块,用于获取高光谱数据矩阵和端元数据矩阵;
28.小波包分解模块,用于使用双正交小波对所述高光谱数据矩阵进行小波包分解,得到高光谱数据矩阵对应的小波包树;
29.所述小波包分解模块,还用于使用双正交小波对所述端元数据矩阵进行小波包分解,得到端元数据矩阵对应的小波包树;
30.所述获取模块,还用于获取所述端元数据矩阵对应的小波包树每个节点处的系数矩阵;
31.计算模块,用于计算每个所述系数矩阵的条件数;
32.所述计算模块,还用于根据每个所述条件数计算每个节点的权重;
33.最小二乘模块,用于将每个节点对应的高光谱数据矩阵和端元数据矩阵作为最小二乘法的输入,将每次最小二乘法输出的结果乘以对应节点的权重得到该节点对应的结果,最后对每个节点对应的结果进行求和得到丰度估计结果。
34.本发明提供的技术方案具有以下有益效果:
35.本发明采用双正交小波变换可以有效对高光谱数据和端元数据进行特征提取,并保证高光谱数据、端元数据和丰度估计三者的线性关系;使用小波包分解后的系数矩阵的条件数加权,可以更大化的利用数据中的有效信息,从而改进最小二乘估计,提高了高光谱遥感影像的解混精度。
附图说明
36.下面将结合附图及实施例对本发明作进一步说明,附图中:
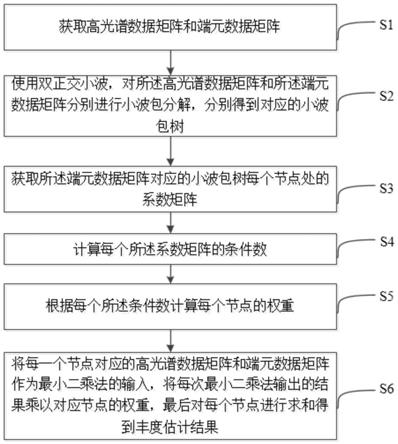
37.图1是本发明实施例中一种基于条件数加权的高光谱遥感影像丰度估计方法的流程图;
38.图2是本发明实施例中分解层数为三层的小波包树的示意图;
39.图3是本发明实施例中高光谱数据矩阵的小波包分解示意图;
40.图4是本发明实施例中分解层数为四层时,端元数据矩阵对应的小波包树;
41.图5是本发明实施例中对于五种地物类型,本发明方法与传统方法的丰度估计精度对比图;
42.其中,图5(a)为传统最小二乘法的高光谱遥感影像丰度估计结果,图5(b)为仅使用最小条件数矩阵的最小二乘方法的高光谱遥感影像丰度估计结果,图5(c)为本发明基于条件数加权的最小二乘高光谱遥感影像丰度估计结果,图5(d)为真实的丰度图;
43.图6是本发明实施例中一种基于条件数加权的高光谱遥感影像丰度估计装置的结构图。
具体实施方式
44.为了对本发明的技术特征、目的和效果有更加清楚的理解,现对照附图详细说明本发明的具体实施方式。
45.如图1所示,本发明实施例提供了一种基于条件数加权的高光谱遥感影像丰度估计方法,包括以下步骤:
46.s1:获取高光谱数据矩阵和端元数据矩阵;
47.其中,高光谱数据矩阵为待解混的高光谱图像;
48.端元数据矩阵可以由一些经典算法求得,如顶点成分分析算法(vca)、空间光谱端元提取算法(ssee)等,或者从端元光谱库中直接提取。
49.s2:使用双正交小波,对所述高光谱数据矩阵和所述端元数据矩阵分别进行小波包分解,分别得到对应的小波包树;
50.具体地,小波包树如图2所示。其中(0,0)代表的是原始数据,每个节点代表了每一层分解的结果,图2中展示的是分解层数为三层的小波包树。
51.步骤s2中,首先使用双正交小波,对所述高光谱数据矩阵进行小波包分解:
52.高光谱数据矩阵的大小为x
×y×
z,相当于是一个三维的数据。其中,x和y是图像数据,z是波长,如图3所示。
53.对高光谱数据矩阵进行小波包分解时,每次分解1
×1×
z的数据,即图3中箭头所示的数据。这样分解完成后,可以得到x
×
y个小波包树,每个节点对应的高光谱数据矩阵的大小为k
×
1,其中,k由分解的层数和选取的双正交小波的类型确定,本实施例中,可以选取bior3.3、haar等双正交小波。
54.然后,对端元数据矩阵进行同样的小波包分解:
55.端元数据矩阵为z
×
e,其中z是波长,e是端元的个数,每个z
×
1的向量代表了一种地物的光谱数据(这样数据总共有e个)。分别对e个z
×
1的数据进行a层变换后得到小波包树,a可以根据实际情况选择任意正整数,在本实施例中,取a=4层,则每个小波包树里可以得到30个节点(不包含根节点,因为根节点是原始数据,其中对于4层分解,每层的节点数为21、22、23、24)。如图4所示。
56.s3:获取所述端元数据矩阵对应的小波包树每个节点处的系数矩阵;
57.具体地,将e个端元数据矩阵对应的小波包树对应节点的数据重新组合成k
×
e的矩阵,其中,因为小波包分解的时候会对数据进行降维,故重新组合的矩阵不再是z
×
e。这样可以得到30个系数矩阵。
58.s4:计算每个所述系数矩阵的条件数;
59.条件数的计算公式为系数矩阵的范数乘以系数矩阵的逆矩阵的范数,即:cond(a)=||a||
·
||a-1
||,其中a表示系数矩阵,cond(a)表示a的条件数。
60.s5:根据每个所述条件数计算每个节点的权重;
61.s5具体包括:
62.定义初始权重计算函数:yi=(x
i-m)n;
63.其中m是最大的条件数,n是一个可调参数,n越大则表示条件数越大的矩阵所占的权重会越低,可以根据实际情况进行选择,xi表示第i个节点的系数矩阵,yi表示第i个节点的初始权重;
64.根据所述初始权重计算函数,计算得到每个节点对应的初始权重yi;
65.对所有的yi进行归一化处理得到最后的权重,即其中wi是每个节点对应的权重。在本实施例中,进行4层小波包分解,对应的i=1,2,....30。
66.s6:将每个节点对应的高光谱数据矩阵和端元数据矩阵作为最小二乘法的输入,将每次最小二乘法输出的结果乘以对应节点的权重得到该节点对应的结果,最后对每个节点对应的结果进行求和得到丰度估计结果。
67.s6中,需要注意的是:高光谱数据矩阵和端元数据矩阵作为输入的时候,要将节点相对应起来,即高光谱数据矩阵是第几个节点的结果,则端元数据矩阵也要是对应节点的结果。本实施例中,由于存在个1
×1×
z的数据和30个节点,所以这个过程要进行x
×y×
30次。每次最小二乘估计得到的结果都要乘以对应的权重,最后求和即可求得最终丰度估计结果。
68.为了验证本发明基于条件数加权的高光谱遥感影像丰度估计方法的估计精度,使用软件matlabr2019a对合成数据进行了仿真。为了构建合成数据,从美国地质勘探局光谱库中选择了5个反射光谱:asphalt(gds317)、brick(gds350)、fiberglass(gds374)、sheetmetal(gds352)和vinylplastic(gds372)。形成了大小为431
×
5的端元数据矩阵。利用大小为5
×
1的丰度向量,生成一个大小为431
×
1的高光谱数据向量。考虑到5个不同的丰度图,因此生成了431波段的高光谱数据矩阵,即128
×
128
×
431。
69.在本实施例中,对于五种地物类型的丰度估计,将本发明基于条件数加权的最小二乘方法和传统的最小二乘方法以及仅使用最小条件数矩阵的最小二乘方法相比,对比结果如图5所示,其中图5(a)为传统最小二乘法的高光谱遥感影像丰度估计结果,图5(b)为仅使用最小条件数矩阵的最小二乘方法的高光谱遥感影像丰度估计结果,图5(c)为本发明基于条件数加权的最小二乘高光谱遥感影像丰度估计结果,图5(d)为真实的丰度图。通过对比可知,本发明方法与真实的丰度图相似度最高,因此本发明方法在解混精度上有明显优于其他两种方法。
70.此外,为了进行定量分析,本实施例中,采用均方根误差(rmse)作为评价标准,具
体计算公式为:其中yi是真实值,是估计值。计算结果如表1:
71.表1本发明方法与其他方法的丰度估计精度对比
[0072][0073]
在一些实施例中,还提供了一种还提供了一种基于条件数加权的高光谱遥感影像丰度估计装置,如图6所示,包括以下模块:
[0074]
获取模块1,用于获取高光谱数据矩阵和端元数据矩阵;
[0075]
小波包分解模块2,用于使用双正交小波对所述高光谱数据矩阵进行小波包分解,得到高光谱数据矩阵对应的小波包树;
[0076]
所述小波包分解模块2,还用于使用双正交小波对所述端元数据矩阵进行小波包分解,得到端元数据矩阵对应的小波包树;
[0077]
所述获取模块1,还用于获取所述端元数据矩阵对应的小波包树每个节点处的系数矩阵;
[0078]
计算模块3,用于计算每个所述系数矩阵的条件数;
[0079]
所述计算模块3,还用于根据每个所述条件数计算每个节点的权重;
[0080]
最小二乘模块4,用于将每个节点对应的高光谱数据矩阵和端元数据矩阵作为最小二乘法的输入,将每次最小二乘法输出的结果乘以对应节点的权重得到该节点对应的结果,最后对每个节点对应的结果进行求和得到丰度估计结果。
[0081]
本发明采用双正交小波变换可以有效对高光谱数据和端元数据进行特征提取,并保证高光谱数据、端元数据和丰度估计三者的线性关系;使用小波包分解后的系数矩阵的条件数加权,可以更大化的利用数据中的有效信息,从而改进最小二乘估计,提高了高光谱数据解混的精度。
[0082]
需要说明的是,在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者系统不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者系统所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括该要素的过程、方法、物品或者系统中还存在另外的相同要素。
[0083]
上述本发明实施例序号仅仅为了描述,不代表实施例的优劣。在列举了若干装置的单元权利要求中,这些装置中的若干个可以是通过同一个硬件项来具体体现。词语第一、第二、以及第三等的使用不表示任何顺序,可将这些词语解释为标识。
[0084]
以上仅为本发明的优选实施例,并非因此限制本发明的专利范围,凡是利用本发
明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1