基于PLC的从虚到实工业机器人实验方法
基于plc的从虚到实工业机器人实验方法
技术领域
1.本发明属于机器人实验教学领域,涉及一种基于plc的从虚到实工业机器人实验方法。
背景技术:
2.机器人控制实验是机器人教育培训和工业领域应用中不可或缺的步骤。为了避免直接在真实机器人上进行控制实验发生事故,现存的实验实现方法第一步基本采用仿真工具进行,即在虚拟平台上进行plc控制算法的逻辑验证。其次将逻辑正确的控制算法用机器人可执行的算法语言重新编写,以便在真实的机器人设备上进行实验。即使在此种验证平台上添加综合验证模块,去检验程序是否使得设备运行速度、角度超出限制,也很容易忽略在真实的控制器上可能发生的问题,导致程序在虚拟设备和实体设备上的运行情况差距较大,造成设备损坏。
3.因此需要一种可以在虚拟仿真环境和实体设备环境之间流畅切换和无缝对接的实验方式,即在虚拟实验中验证运动控制算法程序的正确性,然后逐步过渡到实体机器人实验,控制实验风险,保障设备和人员的安全性。
技术实现要素:
4.为使得最终的机器人控制实验能够在真实机器人上进行,但在此之前须经过多重程序验证,保证算法的正确运行。鉴于此,本发明的技术方案为基于plc的从虚到实工业机器人实验方法,包括以下步骤:
5.s1,将虚拟可编程控制器与虚拟驱动器和虚拟工业机器人连接,进行虚拟环境下的实验;
6.s2,将s1中虚拟可编程控制器更换为实体可编程控制器,进行半虚拟环境下的实验;
7.s3,在s2的基础上,将虚拟工业机器人和驱动器更换为实体工业机器人和驱动器,进行真实环境下的实验。
8.优选地,所述s1中虚拟机器人展示虚拟可编程控制器的运动控制的结果,反馈实验数据。
9.优选地,所述虚拟环境、半虚拟环境和真实环境均在同一开发平台下。
10.优选地,所述s1,包括以下步骤:
11.s11,使用实验电脑上的运动控制编程环境twincat来进行实验,并根据实验要求,使用st语言控制运动功能块,设计运动控制算法逻辑;点击编译按钮,对工程文件进行编译,排除除语法错误和编译错误;
12.s12,启动虚拟可编程控制器和虚拟机器人仿真软件,在twincat中将nc轴与虚拟plc轴进行绑定,并打开v-rep虚拟机器人控制插件,使得虚拟可编程控制器与虚拟机器人进行连接;
13.s13,将编写好的算法下载到虚拟可编程控制器中,点击login和启动按钮,控制虚拟机器人按照编写的算法进行运动;
14.s14,如果机器人运动超过预设速度或者发生位置错误,则调整对应轴控功能块中的速度与位置参数;如果不知道产生错误的原因,则新建程序断点,并逐步调试;
15.s15,重复s13-s14,直到虚拟可编程控制器对虚拟机器人的运动控制在虚拟环境下能完全按照实验计划运行。
16.优选地,所述s2包括以下步骤:
17.s21,将调试好的运动控制算法下载到实体可编程控制器上,并打开虚拟驱动器接收实体可编程控制器发出的控制信号,并驱动pc端的虚拟机器人;
18.s22,点击启动按钮后,如果程序下载失败,则说明实体可编程控制器与电脑的链接发生错误,应该重新对实体可编程控制器进行绑定,并检查ip地址设置;如果程序下载成功,但虚拟机器人不发生运动,则说明实体可编程控制器与虚拟机器人的连接发生错误,此时检查虚拟驱动器软件是否接入成功;
19.s23,重复s21-s22,使得虚拟机器人的运动方式完全与s1中的运动相同。
20.优选地,所述s3中将s2中的虚拟机器人更换为实体机器人,并使用实时以太网将实体可编程控制器与实体工业机器人进行连接,使得实体可编程控制器控制实体工业机器人。
21.优选地,所述s3包括以下步骤:
22.s31,程序启动,如果实体工业机器人的运动姿态静止不动,则检查实体可编程控制器与实体驱动器的实时以太网连接状态是否正常;
23.s32,重复s1-s3,直到完成所有教学任务。
24.本发明至少有如下具体有益效果:
25.1.本方法采用从虚到实的方式进行实验,避免了直接在真实机器人上可能发生的安全问题。
26.2.本方法在同一平台下进行,避免了从虚拟实验到真实实验过程中的程序重编写问题。
27.3.本方法从虚拟实现到半虚拟实验,再到真实实验,逐步的实验方式使得虚实结合的实验进行地更加流畅,避免了中间的程序重写和转换,提升了效率。
附图说明
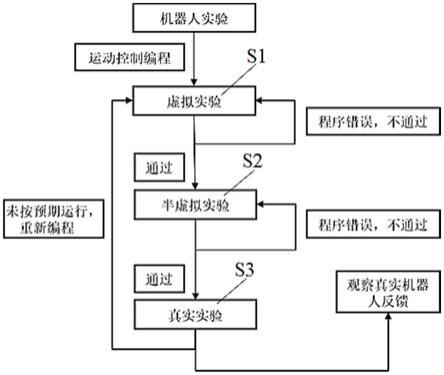
28.图1为本发明方法实施例的基于plc的从虚到实工业机器人实验方法的步骤流程图。
具体实施方式
29.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
30.相反,本发明涵盖任何由权利要求定义的在本发明的精髓和范围上做的替代、修改、等效方法以及方案。进一步,为了使公众对本发明有更好的了解,在下文对本发明的细
节描述中,详尽描述了一些特定的细节部分。对本领域技术人员来说没有这些细节部分的描述也可以完全理解本发明。
31.参见图1,为本发明实施例的本发明的技术方案为基于plc的从虚到实工业机器人实验方法的步骤流程图,从虚到实的工业机器人教学实验实现方法,逐步从虚拟环境实验、半虚拟环境实验过渡到真实环境实验,实现虚实实验的无缝衔接。
32.包括以下步骤:
33.s1,将虚拟可编程控制器与虚拟驱动器和虚拟工业机器人连接,进行虚拟环境下的实验;
34.s2,将s1中虚拟可编程控制器更换为实体可编程控制器,进行半虚拟环境下的实验;
35.s3,在s2的基础上,将虚拟工业机器人和驱动器更换为实体工业机器人和驱动器,进行真实环境下的实验。
36.s1中虚拟机器人展示虚拟可编程控制器的运动控制的结果,反馈实验数据。
37.上述虚拟环境、半虚拟环境和真实环境均在同一开发平台下。
38.s1具体包括以下步骤:
39.s11,使用实验电脑上的运动控制编程环境twincat来进行实验,并根据实验要求,使用st语言控制运动功能块,设计运动控制算法逻辑;点击编译按钮,对工程文件进行编译,排除除语法错误和编译错误;
40.s12,启动虚拟可编程控制器和虚拟机器人仿真软件,在twincat中将nc轴与虚拟plc轴进行绑定,并打开v-rep虚拟机器人控制插件,使得虚拟可编程控制器与虚拟机器人进行连接;
41.s13,将编写好的算法下载到虚拟可编程控制器中,点击login和启动按钮,控制虚拟机器人按照编写的算法进行运动;
42.s14,如果机器人运动超过预设速度或者发生位置错误,则调整对应轴控功能块中的速度与位置参数;如果不知道产生错误的原因,则新建程序断点,并逐步调试;
43.s15,重复s13-s14,直到虚拟可编程控制器对虚拟机器人的运动控制在虚拟环境下能完全按照实验计划运行。
44.s2包括以下步骤:
45.s21,将调试好的运动控制算法下载到实体可编程控制器上,并打开虚拟驱动器接收实体可编程控制器发出的控制信号,并驱动pc端的虚拟机器人;
46.s22,点击启动按钮后,如果程序下载失败,则说明实体可编程控制器与电脑的链接发生错误,应该重新对实体可编程控制器进行绑定,并检查ip地址设置;如果程序下载成功,但虚拟机器人不发生运动,则说明实体可编程控制器与虚拟机器人的连接发生错误,此时检查虚拟驱动器软件是否接入成功;
47.s23,重复s21-s22,使得虚拟机器人的运动方式完全与s1中的运动相同。
48.s3中将s2中的虚拟机器人更换为实体机器人,并使用实时以太网将实体可编程控制器与实体工业机器人进行连接,使得实体可编程控制器控制实体工业机器人。
49.s3具体包括以下步骤:
50.s31,程序启动,如果实体工业机器人的运动姿态静止不动,则检查实体可编程控
制器与实体驱动器的实时以太网连接状态是否正常;
51.s32,重复s1-s3,直到完成所有教学任务。
52.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1