一种手指压力与姿态双模态柔性传感系统
1.本实用新型属于测量测试领域,尤其涉及一种手指压力与姿态双模态柔性传感系统。
背景技术:
2.人手是人体最复杂、最灵巧的器官之一,在我们的日常活动中起着至关重要的作用,例如完成书写、打字、抓取物体等日常动作。手部运动学分析技术广泛应用于运动康复、运动生物力学以及人机交互等领域。其中,手部运动学主要表现两个特点:指尖压力和手指姿态。当进行抓取动作时,一个完整的手部动作不仅仅涉及到手指指尖的压力,还涉及到每个手指的运动姿态。因此,手指尖压力和手指运动姿态的双模态监测对于手部状态评估显得至关重要。此外,当抓取不同形状、不同大小或不同材质的物体时,手指指尖不同区域往往受力不同,因此需要采用阵列压力传感器来表征指尖的受力情况。另外,由于手关节的活动具有多自由度的特性,通过姿态传感器侦测手指的三维运动情况,能够更为全面地表征手部的运动。
3.目前,大量手部动作感知器件主要针对单一的指尖压力测量,或单一的手指手势测量。其中,主流的指尖压力测量方法通常采用单点式压力传感器来检测,但是采用这些测量方式往往无法对指尖不同区域的受力情况进行表征。对于手势测量方法,目前仅只能对手指关节的单自由度测量,无法做到多自由度同时测量。
技术实现要素:
4.本实用新型目的在于克服现有技术中存在的不足而提供一种手指压力与姿态双模态柔性传感系统。
5.本实用新型的目的是这样实现的:一种手指压力与姿态双模态柔性传感系统,包括检测手指压力的压力传感单元、与所述压力传感单元电连接用于检测手指姿态的惯性传感器。
6.优选的,所述压力传感单元与所述惯性传感器电连接时可弯曲与所述手指适配,所述压力传感单元与所述惯性传感器分离时伸直。
7.优选的,所述惯性传感器设置有两个,分别为第一惯性传感器和第二惯性传感器,所述第一惯性传感器贴附在手指的中节指骨,所述第二惯性传感器贴附在手指的近节指骨处,第一惯性传感器和第二惯性传感器电连接后输出。
8.优选的,手指压力与姿态双模态柔性传感系统还包括有柔性电路结构,所述第一惯性传感器和第二惯性传感器设置在所述柔性电路结构上。
9.优选的,所述压力传感单元包括有基底层、导线层、传感层和封装层,所述导线层设置与所述基底层的一侧,将所述传感层与第一惯性传感器电连接,所述封装层覆盖在所述传感层与所述导线层的上侧,将所述传感层与所述导线层封装在基底层上。
10.优选的,所述导线层包括有导线、导线电连接的电极,所述电极包括有输入电极和
输出电极,一导线的一端电连接所述输入电极,其另一端电连接所述第一惯性传感器的一接触电极;另一导线的一端电连接所述输出电极,其另一端电连接所述惯性传感器的另一接触电极;所述输入电极与所述输出电极之间电连接所述传感层。
11.优选的,所述基底层为柔性膜材料或具有延展性的弹性膜材料。
12.优选的,所述基底层、导线层、封装层和柔性电路结构均为蜿蜒设置。
13.优选的,所述封装层为具有弹性或拉伸性能的柔性材料。
14.优选的,所述传感层为压阻式、电容式或压电式力敏感材料。
15.本实用新型具有如下积极效果:将压力传感单元与惯性传感器相结合,分别检测手指的压力和姿态信息,由压力和姿态信息识别手指的运动信息,具有准确度高的优点。
附图说明
16.图1为本实用新型的压力传感单元与惯性传感器的整体装配体示意图;
17.图2为本实用新型的压力传感单元的分散显示的结构示意图;
18.图3本实用新型的压力传感单元导线层的结构示意图;
19.图4本实用新型的惯性传感器背面示意图;
20.图5本实用新型的传感层的工作原理图;
21.图6本实用新型的惯性传感器的工作原理图;
22.图7本实用新型的手背面的部署示意图;
23.图8本实用新型的手正面的部署示意图。
具体实施方式
24.实施例1,如图1~图8示,一种手指压力与姿态双模态柔性传感系统,包括检测手指压力的压力传感单元10、与所述压力传感单元10电连接用于检测手指姿态的惯性传感器。所述压力传感单元10与所述惯性传感器电连接时可弯曲与所述手指适配,所述压力传感单元10与所述惯性传感器分离时伸直。
25.压力传感单元10能够用于检测物体与指尖接触时的压力分布情况,并具有整体延展性,卷曲后能够适应不同的手指大小和形状,可以贴附大拇指、食指、中指、无名指和小拇指的指尖部位。具有较高的测量因子、优良的传感分辨率和良好的重复性。惯性传感器可以分别贴附于大拇指、食指、中指、无名指和小拇指的中节指骨和近节指骨部位,用于检测每个手指指节的姿态,姿态信息包含关节角度、欧拉角、角速度、角加速度和重力加速度。
26.所述压力传感单元10包括有基底层101、导线层102、传感层103和封装层104,所述导线层102设置与所述基底层101的一侧,将所述传感层103与第一惯性传感器201电连接,所述封装层104覆盖在所述传感层103与所述导线层102的上侧,将所述传感层103与所述导线层102封装在基底层101上。所述基底层101、导线层102、封装层104和柔性电路结构30均为蜿蜒设置。
27.所述惯性传感器设置有两个,分别为第一惯性传感器201和第二惯性传感器202,所述第一惯性传感器201贴附在手指的中节指骨,所述第二惯性传感器202贴附在手指的近节指骨处,第一惯性传感器201和第二惯性传感器202电连接后输出。所述的惯性测量单元可以采用三轴、六轴或九轴测量单元。优选为九轴测量单元,集成于所述的柔性电路结构30
的正面。
28.所述基底层101为柔性膜材料或具有延展性的弹性膜材料。所述的基底层101的一侧与指尖贴合,当压力传感单元10与物体接触时,传感层103中的力敏材料电阻会发生变化,根据电阻变化率判断压力值的大小。
29.所述导线层102包括有导线、导线电连接的电极,所述电极包括有输入电极1022和输出电极1021,一导线的一端电连接所述输入电极1022,其另一端电连接所述第一惯性传感器201的一接触电极2011;另一导线的一端电连接所述输出电极1021,其另一端电连接第一惯性传感器201的另一接触电极2011;所述输入电极1022与所述输出电极1021之间电连接所述传感层103。
30.所述的导线层102可以采用具有导电特性的固态金属、液态金属或离子进行填充,优选采用金属金作为导电材料,与所述的基底层101紧密贴合,在发生弯曲和拉伸时导线层102和基底层101能够一起形变。所述的导线层102通过磁控溅射的制造方式将金材料附着于基底层101上,并且与传感层103和封装层104贴合紧密。
31.导线层102还包括与所述的柔性电路结构30相连接的接触电极片105。所述接触电极片105优选金手指。
32.所述电极设置有五个,分别为中部电极、上部电极、下部电极、左部电极和右部电极,所述导线设置有六根,其中五根导线的一端分别电连接所述中部电极、上部电极、下部电极、左部电极和右部电极的输出电极1021,其另一端分别电连接第一惯性传感器201的五个接触电极2011,另外一根导线的一端电连接中部电极、上部电极、下部电极、左部电极和右部电极的输入电极1022,其另一端电连接第一惯性传感器201的另一接触电极2011。
33.与石墨烯气凝胶相接触的五个电极设计成两个半圆形结构,其目的在于:由于气凝胶发泡过程中,会呈现半球形均匀膨胀,两个半圆形电极设计刚好能够与半球形的气凝胶完全贴合,减少由于电极与石墨烯气凝胶之间接触不良而引起的系统噪声。五个电极中,每个电极的其中一个半圆电极,均被连接在一起,作为石墨烯气凝胶的激励电压的输入电极1022,而另一个半圆电极作为石墨烯气凝胶传感信号输出电极1021。激励电压输入电极1022、传感信号的输出电极1021,均与六个金手指相连接。金手指的作用在于能够与第一惯性传感器201背面的接触电极2011相连接,将石墨烯气凝胶的传感信号通过惯性传感器的电路引出至信号处理单元40。
34.所述传感层103为压阻式、电容式或压电式力敏感材料。优选采用电阻式石墨烯气凝胶作为力敏感材料,与所述的导线层102的五个电极之间通过导电银胶进行粘连。传感层103可以设置有多个。通过液态石墨烯气凝胶滴胶技术,将五个传感单元形成于导线层102的上部电极、中部电极、下部电极、左部电极和右部电极,干燥后的石墨烯气凝胶具有力敏特性,能够表征指尖上部、中部、下部、左部和右部区域的受力情况。
35.所述封装层104为具有弹性或拉伸性能的柔性材料。所述的封装层104对所述基底层101、所述的导线层102、所述的传感层103进行整体封装包裹,并且能够达到整体可延展可弯曲的目的。
36.优选的,所述的基底层101和所述的封装层104均为具有延展性能的聚二甲基硅氧烷(pdms)膜材料。
37.如图5所示,传感层采用多路分压电路结构,五个传感层u,l,r,c,d分别与五个分
压电阻r0,r1,r2,r3,r4串联,形成单独的传感通路,并且每个传感通路独立供电。传感通路的信号线s0~s4接入到数模转化电路中进行信号采集。每个传感单元电压信号表示如下:
[0038][0039]
其中,u
signal
为传感层输出信号,u
in
为输入的激励电压,r
x
为传感层的阻值,r
d
为分压电阻的阻值。当传感层受压后,r
x
的电阻将会发生改变,输出电压也会随之改变,因此,压力传感层可以用于表征指尖压力的受力情况。
[0040]
如图6所示,每个惯性传感器都存在三个相互正交的自身坐标p,在旋转过程中与绝对坐标系p’之间会形成夹角,通常采用欧拉角表示。惯性传感器自身坐标py与绝对坐标p’y’之间形成偏航角,px与p’z’之间为翻滚角,py与p’z’之间为俯仰角。每个惯性传感器可以输出一组四元数,其四元数表示方法如下所示:
[0041]
q=q0+q1·
i+q2·
j+q3·
k
[0042]
其中:q0,q1,q2,q3表示四元数的实部,i,j,q表示四元数的虚部。
[0043]
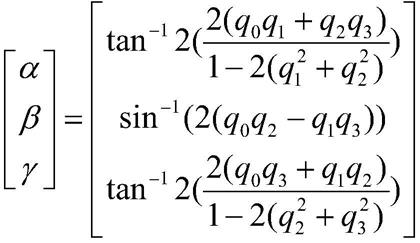
为了描述每个惯性传感器的姿态,通常四元数需要转化成欧拉角,其转化关系如下式所示:
[0044][0045]
其中:α,β,γ分别表示俯仰角、翻滚角和偏航角。
[0046]
手指压力与姿态双模态柔性传感系统还包括有柔性电路结构30,所述第一惯性传感器201和第二惯性传感器202设置在所述柔性电路结构30上。所述的第一惯性传感器201和第二惯性传感器202通过电子元器件贴片的方式和柔性电路结构30相连接。所述的柔性电路结构30可以采用蜿蜒结构,也可以采用冗余结构,优选采用冗余结构,使得这样的电路结构能不会影响到人手指弯曲。其背面也包含与所述的导线层102相连接的接触电极2011。
[0047]
压力传感单元10和惯性传感器,构成一个手指的双模态检测单元,这样的双模态检测单元共有五个。压力传感单元10分别贴附在大拇指,食指,中指,无名指和小拇指指尖处。惯性传感器分别贴附在大拇指,食指,中指,无名指和小拇指的中节指骨和近节指骨处。
[0048]
第二惯性传感器202电连接信号处理单元40,所述的信号处理单元40与五组双模态检测单元统一相连接,用于采集、分析和传输手部的双模态信号数据。
[0049]
如图7和图8所示,将压力传感单元10与惯性传感器相结合,分别检测手指的压力和姿态信息,由压力和姿态信息识别手指的运动信息,具有准确度高的优点。可以扩展到其他涉及手部运动的应用,包括生物信号监测、人机界面和生物机器人等。
[0050]
上述实例仅为本实用新型的优选实例而已,并不用以限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化,凡在本实用新型的精神和原则之
内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1