相机标定装置及自动化设备的制作方法
1.本技术属于相机标定技术领域,特别涉及一种相机标定装置及自动化设备。
背景技术:
2.目前,许多自动化设备需要用到视觉识别系统,在视觉识别系统工作前一般都要经过校准标定的过程,以提高视觉识别系统的定位精度。现有的很多相机标定需要通过人工手动进行标定,导致标定调试的时间较长,影响工作效率。
技术实现要素:
3.鉴于上述状况,有必要提供一种相机标定装置及自动化设备,自动进行相机标定,缩短标定时长,提高工作效率。
4.本技术的实施例提供一种相机标定装置,包括第一基体、移动载具、第一相机、第二相机、抓取件和第一标定块。所述移动载具移动地设于所述第一基体。所述第一相机固定设置于所述移动载具。所述抓取件沿竖直方向移动地连接于所述移动载具,并且所述抓取件能够相对所述移动载具绕竖直方向转动。所述第二相机固定设于所述第一基体且位于所述移动载具下方。所述第一标定块可活动地设于所述第一基体,所述抓取件能够抓取所述第一标定块并带动所述第一标定块离开所述第一基体。所述第一相机和所述第二相机能够识别所述第一标定块。
5.上述的相机标定装置通过移动载体带动第一相机移动,以多角度识别第一标定块来标定第一相机;抓取件在抓取第一标定块后,在移动载具的带动下移动至第二相机上方,抓取件带动第一标定块多角度移动及转动,以使得第二相机通过识别移动的定位块来标定;结构简单可靠,自动化程度高,缩短标定时长,提高工作效率。
6.在本技术的一些实施例中,所述移动载具包括第二基体、第三基体和第四基体。所述第二基体移动地连接于所述第一基体。所述第三基体沿竖直方向移动地连接于所述第二基体。所述第四基体转动地连接于所述第三基体。所述抓取件设置于所述第四基体远离所述第三基体的端部。
7.在本技术的一些实施例中,所述移动载具还包括滑轨,所述滑轨沿竖直方向延伸地设置于所述第二基体,所述第三基体连接所述滑轨并能够在所述滑轨的导引下移动。
8.上述的滑轨连接并导引第三基体移动,可以提高第三基体的移动精度和稳定性。
9.在本技术的一些实施例中,所述移动载具还包括弹性件,所述弹性件的两端分别连接所述第四基体和所述抓取件,使得所述抓取件弹性地连接所述第四基体。
10.上述的弹性件使得抓取件弹性地连接第四基体,可以在抓取件抵接于工件时起缓冲作用,减少抓取件因冲击而损坏的风险,延长使用寿命。
11.在本技术的一些实施例中,所述弹性件为压缩弹簧。
12.在本技术的一些实施例中,所述相机标定装置还包括第二标定块,所述第二标定块固定连接于所述第一基体,所述第一标定块可活动地放置于所述第二标定块上。
13.在本技术的一些实施例中,所述相机标定装置还包括第一补光件和第二补光件。所述第一补光件连接于所述移动载具并相邻于所述第一相机,所述第一补光件用于发射光线。所述第二补光件连接于所述第一基体并相邻于所述第二相机,所述第二补光件用于发射光线。
14.在本技术的一些实施例中,所述第一标定块的横截面为圆形。
15.在本技术的一些实施例中,所述第二标定块的横截面为矩形。
16.本技术的实施例还提供一种自动化设备,包括上述的相机标定装置。
附图说明
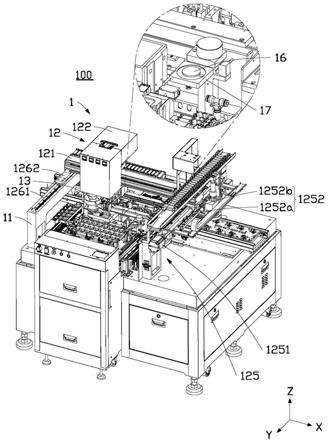
17.图1是本技术的一个实施例中自动化设备的第一视图。
18.图2是本技术的一个实施例中自动化设备的第二视图。
19.图3是本技术的一个实施例中移动载具的结构示意图。
20.主要元件符号说明
21.自动化设备
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
100
22.相机标定装置
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ123.第一基体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
11
24.移动载具
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
12
25.第五基体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
121
26.第二基体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
122
27.第三基体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
123
28.第四基体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
124
29.第一驱动装置
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
125
30.第一驱动源
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1251
31.第一传动机构
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1252
32.丝杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1252a
33.螺母
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1252b
34.第一滑轨
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1261
35.第一滑块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1262
36.第三驱动装置
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
127
37.第三驱动源
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1271
38.第三传动机构
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1272
39.第一换向轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1272a
40.第二换向轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1272b
41.第一传动件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1272c
42.第三滑轨
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1263
43.第三滑块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1264
44.第四驱动装置
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
128
45.第四传动机构
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1281
46.第三换向轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1281a
47.第二传动件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1281b
48.弹性件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
129
49.第一相机
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
13
50.第二相机
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
14
51.抓取件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
15
52.第一标定块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
16
53.第二标定块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
17
54.第一补光件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
18
55.第一方向
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
x
56.第二方向
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
y
57.第三方向
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
z
58.如下具体实施方式将结合上述附图进一步说明本技术。
具体实施方式
59.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行描述,显然,所描述的实施例仅是本技术一部分实施例,而不是全部的实施例。
60.需要说明的是,当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中设置的元件。当一个元件被认为是“设置在”另一个元件,它可以是直接设置在另一个元件上或者可能同时存在居中设置的元件。
61.除非另有定义,本文所使用的所有的技术和科学术语与属于本技术的技术领域的技术人员通常理解的含义相同。本文中在本技术的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本技术。
62.本技术的实施例提供一种相机标定装置,包括第一基体、移动载具、第一相机、第二相机、抓取件和第一标定块。所述移动载具移动地设于所述第一基体。所述第一相机固定设置于所述移动载具。所述抓取件沿竖直方向移动地连接于所述移动载具,并且所述抓取件能够相对所述移动载具绕竖直方向转动。所述第二相机固定设于所述第一基体且位于所述移动载具下方。所述第一标定块可活动地设于所述第一基体,所述抓取件能够抓取所述第一标定块并带动所述第一标定块离开所述第一基体。所述第一相机和所述第二相机能够识别所述第一标定块。
63.上述的相机标定装置通过移动载体带动第一相机移动,以多角度识别第一标定块来校准标定第一相机;抓取件在抓取第一标定块后,在移动载具的带动下移动至第二相机上方,抓取件带动第一标定块多角度移动及转动,以使得第二相机通过识别移动的定位块来校准标定;结构简单可靠,自动化程度高,缩短标定时长,提高工作效率。
64.本技术的实施例还提供一种自动化设备,包括相机标定装置,第一基体固定设置于该自动化设备。
65.作为示例性的,该自动化设备可用于装配工件,第一相机和第二相机能够相互独立的识别拍摄工件。
66.为了更好的对结构进行说明,下面将结合空间直角坐标系o
‑
xyz进行说明,其中,第一方向和第二方向为水平方向,第三方向为竖直方向。
67.结合附图,对本技术的实施例作进一步的说明。
68.如图1、图2和图3所示,本技术的实施方式提供一种相机标定装置1,包括第一基体11、移动载具12、第一相机13、第二相机14、抓取件15、第一标定块16和第二标定块17。移动载具12移动地连接于第一基体11。第一相机13和抓取件15设置于移动载具12,进一步的,第一相机13固定连接于移动载具12,抓取件15沿第三方向z移动地连接于移动载具12,且抓取件15能够相对移动载具12绕第三方向z转动。第二相机14和第二标定块17固定连接于第一基体11,第一标定块16活动地放置于第二标定块17。
69.移动载具12包括第二基体122、第三基体123、第四基体124、第五基体121、第一驱动装置125、第二驱动装置(图未示)、第三驱动装置127和第四驱动装置128。
70.第一驱动装置125连接第一基体11和第五基体121,且能够驱动第五基体121相对第一基体11沿第二方向y移动。
71.第二驱动装置连接第二基体122和第五基体121,且能够驱动第二基体122相对第五基体121沿第一方向x移动。
72.第三驱动装置127连接第三基体123和第二基体122,且能够驱动第三基体123相对第二基体122沿第三方向z移动。
73.第四基体124可转动地连接于第三基体123,第四基体124位于第三基体123沿第三方向z的端部,且第四基体124远离第三基体123的端部沿第三方向z往下延伸设置。
74.第四驱动装置128连接第四基体124和第二基体122,且能够驱动第四基体124相对第三基体123转动。
75.抓取件15设置于第四基体124远离第三基体123的端部。在一些实施例中,抓取件15位于第三基体123沿第三方向z的端部。
76.第一驱动装置125包括第一驱动源1251和第一传动机构1252,第一驱动源1251固定连接于第一基体11,第一传动机构1252连接第一驱动源1251和第五基体121,使得第一驱动源1251能够通过驱动第一传动机构1252以带动第五基体121移动。
77.在一些实施例中,第一驱动源1251包括伺服电机。第一传动机构1252包括丝杆1252a和螺母1252b。丝杆1252a转动地连接于第一基体11,且丝杆1252a的延伸方向平行于第二方向y。丝杆1252a的一端连接于伺服电机,使得伺服电机能够驱动丝杆1252a转动。螺母1252b螺纹连接于丝杆1252a,使得丝杆1252a转动能够牵引螺母1252b直线移动。进一步的,螺母1252b固定连接于第五基体121,使得螺母1252b能够带动第五基体121移动。
78.在一些实施例中,移动载具12还包括第一滑轨1261和第一滑块1262。第一滑轨1261固定设置于第一基体11,且第一滑轨1261的延伸方向平行于第二方向y。第一滑块1262连接第一滑轨1261和第五基体121,使得第五基体121能够在第一滑轨1261的导引下移动。可以理解的,第一滑轨1261可以提高第五基体121的移动精度和稳定性。
79.在一些实施例中,第一滑轨1261的数量为两个,两个第一滑轨1261沿第一方向并排设置。相应的,第一滑块1262的数量为至少两个。
80.第二驱动装置包括第二驱动源和第二传动机构(图未示),第二驱动源固定连接于第五基体121,第二传动机构连接第五基体121和第二基体122,使得第二驱动源能够通过驱动第二传动机构以带动第二基体122移动。
81.在一些实施例中,移动载具12还包括第二滑轨和第二滑块(图未示)。第二滑轨固
定设置于第五基体121,且第二滑轨的延伸方向平行于第一方向x。第二滑块连接第二滑轨和第二基体122,使得第二基体122能够在第二滑轨的导引下移动。可以理解的,第二滑轨可以提高第二基体122的移动精度和稳定性。
82.第三驱动装置127包括第三驱动源1271和第三传动机构1272,第三驱动源1271固定连接于第二基体122,第三传动机构1272连接第三基体123和第二基体122,使得第三驱动源1271能够通过驱动第三传动机构1272以带动第三基体123沿第三方向z移动。
83.在一些实施例中,第三驱动源1271包括伺服电机。第三传动机构1272包括第一换向轮1272a、第二换向轮1272b和第一传动件1272c。第一换向轮1272a和第二换向轮1272b转动地连接于第二基体122,且第一换向轮1272a的中心和第二换向轮1272b的中心连线平行于第三方向z。伺服电机连接第一换向轮1272a,并能够驱动第一换向轮1272a转动。第一传动件1272c连接第一换向轮1272a和第二换向轮1272b,使得第一换向轮1272a在转动时能够牵引第一传动件1272c沿第三方向z移动。进一步的,第一传动件1272c连接第三基体123,使得第一传动件1272c能够带动第三基体123移动。
84.在一些实施例中,第一传动件1272c为同步带,相应的,第一换向轮1272a和第二换向轮1272b为同步轮。
85.在一些实施例中,第一传动件1272c为链条,相应的,第一换向轮1272a和第二换向轮1272b为链轮。
86.在一些实施例中,移动载具12还包括第三滑轨1263和第三滑块1264。第三滑轨1263固定设置于第二基体122,且第三滑轨1263的延伸方向平行于第三方向z。第三滑块1264连接第三滑轨1263和第三基体123,使得第三基体123能够在第三滑轨1263的导引下移动。可以理解的,第三滑轨1263可以提高第三基体123的移动精度和稳定性。
87.第四驱动装置128包括第四驱动源(图未示)和第四传动机构1281。第四驱动源固定连接于第二基体122,第四传动机构1281连接第四基体124和第二基体122,使得第四驱动源能够通过驱动第四传动机构1281以使第四基体124转动。
88.在一些实施例中,第四驱动源包括伺服电机。第四传动机构1281包括第三换向轮1281a、第四换向轮(图未示)和第二传动件1281b。第三换向轮1281a和第四换向轮转动地连接于第二基体122,且第三换向轮1281a和第四换向轮的中心连线垂直于第三方向z。伺服电机连接第四换向轮,并能够驱动第四换向轮转动。第二传动件1281b连接第三换向轮1281a和第四换向轮,使得第四换向轮在转动时,能够通过第二传动件1281b牵引第三换向轮1281a同步转动。进一步的,第三换向轮1281a连接于第四基体124,使得第三换向轮1281a能够带动第四基体124同步转动。
89.在一些实施例中,第四基体124为柱状结构。进一步的,该柱状结构的中心线与第三换向轮1281a的中心线重合。进一步的,第四基体124的侧面上设有第一限位机构(图未示),第三换向轮1281a连接于第一限位结构,第三换向轮1281a能够通过第一限位结构带动第四基体124转动。在一些实施例中,第一限位结构可以是在第四基体124侧面上加工而成的平面或键槽。
90.在一些实施例中,第二传动件1281b为同步带,相应的,第三换向轮1281a和第四换向轮为同步轮。
91.在一些实施例中,第二传动件1281b为链条,相应的,第三换向轮1281a和第四换向
轮为链轮。
92.在一些实施例中,该移动载具12还包括转动轴承(图未示),转动轴承的内圆周同轴的连接于第四基体124,转动轴承的外圆周连接于第二基体122。可以理解的,转动轴承可以提高第四基体124的转动精度及稳定性。
93.在一些实施例中,该移动载具12还包括弹性件129,弹性件129的两端分别连接第四基体124和抓取件15,使得抓取件15弹性地连接于第四基体124,以在抓取件15抓取工件时,抓取件15能够相对第四基体124具有缓冲余量,减少冲击损坏的风险,提高抓取件15的使用寿命。
94.在一些实施例中,抓取件15为气动吸头。
95.在一些实施例中,抓取件15的数量为多个。进一步的,所有的抓取件15沿第一方向x排列设置。可以理解的,多个抓取件15可以同时抓取工件,提高工作效率。
96.第一相机13固定连接于第二基体122,且第一相机13相邻于抓取件15。进一步的,第一相机13的摄像头沿第三方向z朝下设置。
97.在一些实施例中,该相机标定装置1还包括第一补光件18,第一补光件18固定连接于第二基体122,且第一补光件18相邻于第一相机13设置。第一补光件18可发射光线,来为第一相机13补光,提高第一相机13的拍摄效果。
98.第二标定块17位于第二基体122的下方,第一相机13可在第二基体122的带动下移动至第二标定块17的上方。第一标定块16可以放置在第二标定块17上,当第一相机13移动至第一标定块16上方时,第一相机13可以识别该第一标定块16和第二标定块17并拍照。
99.在一些实施例中,第一标定块16的横截面为圆形。第二标定块17上设有圆形的槽,第一标定块16可放置在该圆形槽内。
100.在一些实施例中,第二标定块17的横截面为矩形。
101.本技术中第一相机13的标定步骤为:
102.将第一标定块16放置于第二标定块17上,第一相机13在第二基体122的带动下移动至第一标定块16上方以拍摄第一标定块16,然后通过第二基体122的多角度移动,使得第一相机13在多个角度拍摄第一标定块16,然后通过计算机算法来标定第一相机13。
103.可以理解的是,该第一相机13的标定无需人工参与,完全自动化完成,可以缩短第一相机13的标定时间,提高工作效率。
104.在一些实施例中,第一相机13沿着九宫格对应的各分区范围间多角度移动。
105.第二相机14固定连接于第一基体11且位于第二基体122下方,第一相机13的摄像头沿第三方向z朝上设置。
106.在一些实施例中,该相机标定装置1还包括第二补光件(图未示),第二补光件固定连接于第一基体11,且第二补光件相邻于第二相机14。第二补光件可发射光线,来为第二相机14补光,提高第二相机14的拍摄效果。
107.本技术中第二相机14的标定步骤为:
108.抓取件15在第二基体122的带动下移动至第一标定块16上方,第三驱动装置127动作使得第三基体123沿第三方向z移动下降,第三基体123通过第四基体124带动抓取件15下降,直至抓取件15抵接于第一标定块16并将第一标定块16抓取。在第一驱动装置125、第二驱动装置和第三驱动装置127的协同作用下,抓取件15承载着第一标定块16移动至第二相
机14上方,然后抓取件15带着第一标定块16多角度移动,并且来回转动,使得第二相机14在多角度拍摄第一标定块16,然后通过计算机算法以标定第二相机14。
109.进一步的,抓取件15带着第一标定块16移动,并将第一标定块16放回第二标定块17上的圆形槽内,重复以上步骤,直至每个抓取件15均带着第一标定块16移动到第二相机14上方拍照。
110.可以理解的是,该第二相机14的标定无需人工参与,完全自动化完成,可以缩短第二相机14的标定时间,提高工作效率。
111.在一些实施例中,抓取件15带着第一标定块16沿着九宫格对应的各分区范围间多角度移动,并且正向转动及反向转动。
112.综上所述,相机标定装置1通过移动载体带动第一相机13沿九宫格的形状移动,以多角度拍摄第一标定块16来标定第一相机13;抓取件15在抓取第一标定块16后,在移动载具12的带动下移动至第二相机14上方,抓取件15带动第一标定块16沿九宫格对应的各分区范围间移动并双向转动,以使得第二相机14通过拍摄移动的第一标定块16来标定;结构简单可靠,自动化程度高,缩短标定时长,提高工作效率。
113.另外,本领域技术人员还可在本技术精神内做其它变化,当然,这些依据本技术精神所做的变化,都应包含在本技术所公开的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1