三维触摸设备的制作方法
1.本发明涉及一种触摸屏,特别是一种三维触摸屏,属于信息技术领域。
背景技术:
2.随着触摸技术发展,触摸屏应用越来越广泛,不过还主要是二维的平面或曲面触摸屏。当前触摸屏主要有表面声波、红外、电阻、电容等类型,其共同特点属于二维的平面触摸屏或曲面触摸屏,也有触摸屏(例如电磁、电容、红外触摸屏)在需要使用触摸笔情形下将触摸笔添加压力传感器以获得具有压感的触摸屏,或者有的触摸屏屏体上设置有压力传感器以检测触摸压力,但这些都不是具有空间意义的三维触摸屏。
3.与触摸屏应用天然关联的显示技术日新月异,3d显示已日渐成熟,游戏、教育、培训等应用对具有空间意义的三维触摸需求越来越强烈。
4.现有基于超声波实施的三维触摸方案(例如专利公开号cn106843502a)存在触摸区域内人体等复杂干扰介质而很难准确定位的缺点。
5.现有基于摄像机实施的三维触摸方案(例如专利公开号cn103914152a、cn104199550a、cn103488356a)存在盲区或装置体积过大、触摸精度不高、可实现性差、不便于标准化或触摸无法准确等缺点。
技术实现要素:
6.本发明的目的在于克服现有技术存在的上述问题,提供一种三维触摸设备,实现不同3d显示应用的三维触摸,具有盲区及体积小、便于实现、触摸精确度高、便于标准化、z轴长、可实现更准确触摸等,提高了三维触摸的可普及性。
7.为实现上述目的,本发明采用的技术方案如下:
8.本三维触摸设备,在显示面板(1)前的三维触摸区域立方体背面四个角外分别对称设置1个摄像机,摄像机轴线均与三维触摸区域立方体背面呈45度角,摄像机采集朝向均为三维触摸区域立方体,摄像机轴线均与三维触摸区域立方体背面所对应角的两个边线呈相等角,各摄像机沿轴线方向与三维触摸区域立方体所就近对应角顶点距离相等,各摄像机与三维触摸区域立方体背面距离相等,各摄像机行扫描线与三维触摸区域立方体背面角度相等;所述摄像机规格相同,采集角度大于或等于90度;所述摄像机分别与图像处理模块(2)相连;其工作方法:三维触摸区域立方体背面左边的上下2个摄像机确定三维触摸区域立方体右半部分的触摸坐标、三维触摸区域立方体背面右边的上下2个摄像机确定三维触摸区域立方体左半部分的触摸坐标,或者三维触摸区域立方体背面上边的左右2个摄像机确定三维触摸区域立方体下半部分的触摸坐标、三维触摸区域立方体背面下边的左右2个摄像机确定三维触摸区域立方体上半部分的触摸坐标;根据所在边的2个摄像机参数、2个摄像机之间距离参数、摄像机轴线与三维触摸区域立方体各个面的角度参数、2个摄像机行和列变化数据计算三维触摸x、y、z坐标。
9.所述摄像机行和列变化数据,设置变化数据的阀值以滤掉大物体触摸;以离三维
触摸区域立方体背面距离最近的摄像机行和列变化数据位置为有效触摸位置。
10.所述摄像机包括图像传感器、镜头、处理器、通讯模块。
11.所述摄像机为红外摄像机;所述摄像机包括覆盖三维触摸区域的红外光源。
12.所述摄像机与图像处理模块以以太网接口、usb接口、i2c接口、spi接口相连。
13.所述摄像机和红外光源设置在支架上。
14.所述图像处理模块2为计算机主机3。
15.采用本发明的优点在于:
16.1,本发明中,在显示面板(1)前的三维触摸区域立方体背面四个角外分别对称设置1个摄像机,摄像机轴线均与三维触摸区域立方体背面呈45度角,摄像机朝向均为三维触摸区域立方体,摄像机轴线均与三维触摸区域立方体背面所对应角的两个边线呈相等角,各摄像机沿轴线方向与三维触摸区域立方体所就近对应角顶点距离相等,各摄像机与三维触摸区域立方体背面距离相等,各摄像机行扫描线与三维触摸区域立方体背面角度相等;所述摄像机规格相同,采集角度大于或等于90度;所述摄像机分别与图像处理模块(2)相连;其工作方法:三维触摸区域立方体背面左边的上下2个摄像机确定三维触摸区域立方体右半部分的触摸坐标、三维触摸区域立方体背面右边的上下2个摄像机确定三维触摸区域立方体左半部分的触摸坐标,或者三维触摸区域立方体背面上边的左右2个摄像机确定三维触摸区域立方体下半部分的触摸坐标、三维触摸区域立方体背面下边的左右2个摄像机确定三维触摸区域立方体上半部分的触摸坐标;根据所在边的2个摄像机参数、2个摄像机之间距离参数、摄像机轴线与三维触摸区域立方体各个面的角度参数、2个摄像机行和列变化数据计算三维触摸x、y、z坐标。
17.采用上述设备及方法,所需要摄像机镜头不需要超广角后成像不易失真而触摸精度更高、镜头容易采购;所用摄像机按规则设置在对应角的角分线上则不会随不同三维触摸空间尺寸修正过多触摸算法、便于标准化,可方便满足体积小或不同3d显示应用的三维z轴较长的需求;所使用的触摸算法简单、占用处理器资源小,有利于成本控制;采用本边摄像机为基准确定对边区域触摸坐标能达到触摸盲区小及触摸准确的效果。
18.2,本发明中,所述摄像机行和列变化数据,设置变化数据的阀值以滤掉大物体触摸,可以克服三维触摸区域人体进入的干扰,或者选用手指触摸时屏蔽掉拳头的干扰;以离三维触摸区域立方体背面距离最近的摄像机行和列变化数据位置为有效触摸位置,能简单方便去掉干扰人体等干扰触摸。
19.3,本发明中,所述摄像机包括图像传感器、镜头、处理器、通讯模块,方便配置不同摄像机以不同触摸分辨率或运行速度等需求。
20.4,本发明中,所述摄像机为红外摄像机;所述摄像机包括覆盖三维触摸区域的红外光源,可以改善环境光对触摸可靠性的影响。
21.5,本发明中,所述摄像机与图像处理模块以以太网接口、usb接口、i2c接口、spi接口相连,提高了摄像机选择的灵活性。
22.6,本发明中,所述摄像机或和红外光源设置在支架上,有利于集成安装。
23.7,本发明中,所述图像处理模块为计算机主机,有利于降低成本。
附图说明
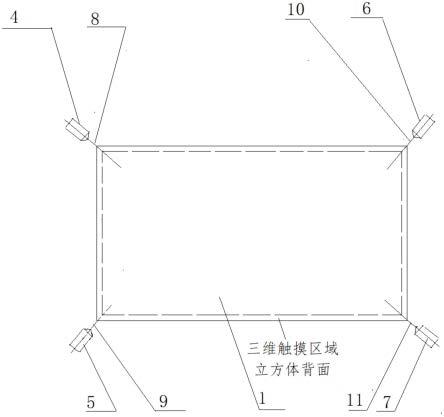
24.图1为本设备典型空间结构示意图;
25.图2为本设备模块连接图;
26.图3为本设备显示面板含摄像机的侧面图;
27.图4为单个摄像机采集图
28.图5为基于单边2个摄像机的触摸点位t的原始坐标体系图
29.图中标记为:1、显示面板
30.2、图像处理模块,
31.3、计算机主机,
32.4、左上角摄像机,
33.5、左下角摄像机,
34.6、右上角摄像机,
35.7、右下角摄像机,
36.8、左上角摄像机轴线,
37.9、左下角摄像机轴线,
38.10、右上角摄像机轴线,
39.11、右下角摄像机轴线,
40.12、显示面板显示区域。
具体实施方式
41.如图2、图3
42.本三维触摸设备,在显示面板(1)前的三维触摸区域立方体背面四个角外分别对称设置1个摄像机,摄像机轴线均与三维触摸区域立方体背面呈45度角,摄像机朝向均为三维触摸区域立方体,摄像机轴线均与三维触摸区域立方体背面所对应角的两个边线呈相等角,各摄像机沿轴线方向与三维触摸区域立方体所就近对应角顶点距离相等,各摄像机与三维触摸区域立方体背面距离相等,各摄像机行扫描线与三维触摸区域立方体背面角度相等;所述摄像机规格相同,采集角度大于或等于90度;所述摄像机分别与图像处理模块(2)相连;其工作方法:三维触摸区域立方体背面左边的上下2个摄像机确定三维触摸区域立方体右半部分的触摸坐标、三维触摸区域立方体背面右边的上下2个摄像机确定三维触摸区域立方体左半部分的触摸坐标,或者三维触摸区域立方体背面上边的左右2个摄像机确定三维触摸区域立方体下半部分的触摸坐标、三维触摸区域立方体背面下边的左右2个摄像机确定三维触摸区域立方体上半部分的触摸坐标;根据所在边的2个摄像机参数、2个摄像机之间距离参数、摄像机轴线与三维触摸区域立方体各个面的角度参数、2个摄像机行和列变化数据计算三维触摸x、y、z坐标。
43.更进一步优选之一,设置摄像机行和列变化数据阀值以滤掉大物体触摸;以离三维触摸区域立方体背面距离最近的摄像机行和列变化数据位置为有效触摸位置。
44.更进一步优选之一,摄像机包括图像传感器、镜头、处理器、通讯模块。
45.更进一步优选之一,所述摄像机为红外摄像机;所述摄像机包括覆盖三维触摸区域的红外光源。
46.更进一步优选之一,所述摄像机与图像处理模块以以太网接口、usb接口、i2c接口、spi接口相连。
47.更进一步优选之一,所述摄像机和红外光源设置在支架上。
48.更进一步优选之一,所述图像处理模块2为计算机主机3。
49.所述摄像机轴线是指摄像机靶面成像中心点与摄像机采集成像对象成像平面的中心点的连线直线。
50.所述显示面板为液晶面板或投影显示界面。
51.所述三维触摸区域立方体设置在显示面板正前方并为长方体形态,三维触摸区域立方体的背面与显示面板或其他显示界面的显示平面平行,三维触摸区域与三维显示区域对应;三维触摸区域立方体的正面的高度为立方体的高度h、正面的宽度为立方体的长度l,立方体的长度l方向为x轴方向、立方体的宽度w方向为z轴方向、立方体的高度h方向为y轴方向。三维触摸区域立方体背面与显示面板显示平面之间距离视显示面板的空间三维显示区域确定。
52.摄像机参数(例如靶面的像素间距、行列总像素、镜头焦距)及各摄像机间的安装距离以及与三维触摸区域立方体距离,与三维触摸区域立方体及相应长宽度参数呈对应关系。
53.所述摄像机为ccd摄像机或cmos摄像机,图像传感器为ccd或cmos传感器。
54.所述图像处理模块,包括stm32f427等处理器,还可包括g850g等hub芯片;还可直接设置在计算机主机中。
55.所述角度数字相同或角度相等或角度相同,没有局限角度线的方向而只要构成角的锐角值相等即为相同或相等,例如两条线分别与同一平面相交角度值为45度但两条线朝向相反也视为角度相同或相等。
56.需要算法根据特征实现将进入三维触摸区域的人体等大物体干扰滤掉。
57.实施例1
58.如图1,本三维触摸设备,在三维触摸区域立方体背面四个角外上分别设置1个摄像机:左上角摄像机4、左下角摄像机5、右上角摄像机6、右下角摄像机7,左上角摄像机轴线8、左下角摄像机轴线9、右上角摄像机轴线10、右下角摄像机轴线11均与三维触摸区域立方体背面(显示面板1显示平面)呈45度角,左上角摄像机4、左下角摄像机5、右上角摄像机6、右下角摄像机7朝向均为三维触摸区域立方体,左上角摄像机轴线8、左下角摄像机轴线9、右上角摄像机轴线10、右下角摄像机轴线11均与三维触摸区域立方体背面所在角的两个边线呈相等角,左上角摄像机4、左下角摄像机5、右上角摄像机6、右下角摄像机7分别沿左上角摄像机轴线8、左下角摄像机轴线9、右上角摄像机轴线10、右下角摄像机轴线11与三维触摸区域立方体背面所对应角顶点距离相等,左上角摄像机4、左下角摄像机5、右上角摄像机6、右下角摄像机7与三维触摸区域立方体背面距离相等,左上角摄像机4、左下角摄像机5、右上角摄像机6、右下角摄像机7的各自行扫描线与三维触摸区域立方体背面平行;左上角摄像机4、左下角摄像机5、右上角摄像机6、右下角摄像机7规格相同,采集角度100度;左上角摄像机4、左下角摄像机5、右上角摄像机6、右下角摄像机7分别与图像处理模块2以usb相连,图像处理模块2以usb与计算机主机2相连。
59.如图4,所采用摄像机4、摄像机5、摄像机6、摄像机7为面阵模式,各自采集空间范
围为以摄像机焦点为圆心且截面为矩形的椎体,摄像机所选用采集角度100度,每个角的摄像机均能完整采集覆盖三维触摸区域立方体。
60.选取以左边摄像机4、摄像机5确定三维触摸区域立方体右半部分触摸坐标,以右边摄像机6、摄像机7确定三维触摸区域立方体左半部分触摸坐标。
61.进一步地如图5,设定三维触摸区域立方体背面为三维坐标x轴y轴所在平面的矩形区域、空间向z轴方向延伸,为计算简单假定将左边摄像机4焦点设置在三维触摸区域立方体原始坐标系o点、左边摄像机5焦点设置在三维触摸区域立方体原始坐标系p点,2个摄像机距离op为已知参数d。触摸点位t垂直映射在x轴y轴所在的水平平面为q点,tq距离z则为触摸点位t的z轴原始坐标;q点分别至y轴、x轴的垂直距离线x、y为触摸点位t的x轴、y轴原始坐标。
62.在三维触摸区域立方体内,当有触摸时,摄像机某些行列像素数据会发生变化,这种变化往往是多行多列的块状区域像素的变化,依据这种块状特性可以一定程度进一步过滤掉摄像机图像干扰信息。基于这种块状像素变化,可以选择块的中心(中心行序号、中心列序号)来作为触摸点位t的行列变化像素位。
63.∠xoq为触摸点位t由摄像机4在原始坐标体系中行扫描角,即ot线与xoz面之间夹角;∠toq为触摸点位t由摄像机4在原始坐标体系中列扫描角,即ot线与xoy面之间夹角;∠opq为触摸点位t由摄像机5在原始坐标体系中行扫描角,即pt线与yoz面之间夹角。
64.∠xoq=(摄像机4行变化像素位/行总像素)*行总角度100度-(行总角度100度-90度)/2,其中(行总角度100度-90度)/2为摄像机4行扫描线单侧偏离初始角度;
65.∠toq=(摄像机4列变化像素位/列总像素)*列总角度100度-(列总角度100度-90度)/2,其中(列总角度100度-90度)/2为摄像机4列扫描线单侧偏离初始角度;
66.∠opq=(摄像机5行变化像素位/行总像素)*行总角度100度-(行总角度100度-90度)/2,其中(行总角度100度-90度)/2为摄像机5行扫描线单侧偏离初始角度。
67.以如上公式计算触摸角参数后,再以如下三角函数公式计算oq线距离e:
68.e=d*(sin∠opq)/(sin∠pqo)=d*(sin∠opq)/(sin(180-∠opq-∠poq)=d*(sin∠opq)/(sin(180-∠opq-(90-∠xoq))=d*(sin∠opq)/(sin(90+∠xoq-∠opq));
69.然后依据如下三角函数公式计算原始坐标xyz:
70.x=e*(cos∠xoq)=d*(sin∠opq)/(sin(90+∠xoq-∠opq))*(cos∠xoq);
71.y=e*(sins∠xoq)=d*(sin∠opq)/(sin(90+∠xoq-∠opq))*(sins∠xoq);
72.z=e*(tan∠toq)=d*(sin∠opq)/(sin(90+∠xoq-∠opq))*(tan∠toq)。
73.再综合计算触摸点位t原始坐标xyz:
74.根据上述方法所计算的左边摄像4、摄像机5计算三维触摸区域触摸点位t原始触摸坐标xyz,判定x是否大于三维触摸区域立方体长度(x轴方向)l/2,如果是则为有效原始触摸坐标;否者依据上述方法同样原理计算由右边摄像6、摄像机7计算三维触摸区域触摸点位t原始触摸坐标xyz。
75.最后将触摸点位t原始触摸坐标xyz按通用方法转换映射为显示面板或投影所适应的坐标体系基于应用所需的坐标x、y、z。
76.实施例2
77.如图1,本三维触摸设备,在三维触摸区域立方体背面四个角外上分别设置1个摄
像机:左上角摄像机4、左下角摄像机5、右上角摄像机6、右下角摄像机7,左上角摄像机轴线8、左下角摄像机轴线9、右上角摄像机轴线10、右下角摄像机轴线11均与三维触摸区域立方体背面(显示面板1显示平面)呈45度角,左上角摄像机4、左下角摄像机5、右上角摄像机6、右下角摄像机7朝向均为三维触摸区域立方体,左上角摄像机轴线8、左下角摄像机轴线9、右上角摄像机轴线10、右下角摄像机轴线11均与三维触摸区域立方体背面所在角的两个边线呈相等角,左上角摄像机4、左下角摄像机5、右上角摄像机6、右下角摄像机7分别沿左上角摄像机轴线8、左下角摄像机轴线9、右上角摄像机轴线10、右下角摄像机轴线11与三维触摸区域立方体背面所对应角顶点距离相等,左上角摄像机4、左下角摄像机5、右上角摄像机6、右下角摄像机7与三维触摸区域立方体背面距离相等,左上角摄像机4、左下角摄像机5、右上角摄像机6、右下角摄像机7的各自行扫描线与三维触摸区域立方体背面垂直;左上角摄像机4、左下角摄像机5、右上角摄像机6、右下角摄像机7规格相同,采集角度100度;左上角摄像机4、左下角摄像机5、右上角摄像机6、右下角摄像机7分别与图像处理模块2以usb相连,图像处理模块2以usb与计算机主机2相连。
78.如图4,所采用摄像机4、摄像机5、摄像机6、摄像机7为面阵模式,各自采集空间范围为以摄像机焦点为圆心且截面为矩形的椎体,摄像机所选用采集角度100度,每个角的摄像机均能完整采集覆盖三维触摸区域立方体。
79.选取以左边摄像机4、摄像机5确定三维触摸区域立方体右半部分触摸坐标,以右边摄像机6、摄像机7确定三维触摸区域立方体左半部分触摸坐标。
80.进一步地如图5,设定三维触摸区域立方体背面为三维坐标x轴y轴所在平面的矩形区域、空间向z轴方向延伸,为计算简单假定将左边摄像机4焦点设置在三维触摸区域立方体原始坐标系o点、左边摄像机5焦点设置在三维触摸区域立方体原始坐标系p点,2个摄像机距离op为已知参数d。触摸点位t垂直映射在x轴y轴所在的水平平面为q点,tq距离z则为触摸点位t的z轴原始坐标;q点分别至y轴、x轴的垂直距离线x、y为触摸点位t的x轴、y轴原始坐标。
81.在三维触摸区域立方体内,当有触摸时,摄像机某些行列像素数据会发生变化,这种变化往往是多行多列的块状区域像素的变化,依据这种块状特性可以一定程度进一步过滤掉摄像机图像干扰信息。基于这种块状像素变化,可以选择块的中心(中心行序号、中心列序号)来作为触摸点位t的行列变化像素位。
82.∠xoq为触摸点位t由摄像机4在原始坐标体系中列扫描角,即ot线与xoz面之间夹角;∠toq为触摸点位t由摄像机4在原始坐标体系中行扫描角,即ot线与xoy面之间夹角;∠opq为触摸点位t由摄像机5在原始坐标体系中列扫描角,即pt线与yoz面之间夹角。
83.∠xoq=(摄像机4列变化像素位/列总像素)*列总角度100度-(列总角度100度-90度)/2,其中(列总角度100度-90度)/2为摄像机4列扫描线单侧偏离初始角度;
84.∠toq=(摄像机4行变化像素位/行总像素)*行总角度100度-(行总角度100度-90度)/2,其中(行总角度100度-90度)/2为摄像机4行扫描线单侧偏离初始角度;
85.∠opq=(摄像机5列变化像素位/行总像素)*列总角度100度-(列总角度100度-90度)/2,其中(列总角度100度-90度)/2为摄像机5列扫描线单侧偏离初始角度。
86.以如上公式计算触摸角参数后,再以如下三角函数公式计算oq线距离e:
87.e=d*(sin∠opq)/(sin∠pqo)=d*(sin∠opq)/(sin(180-∠opq-∠poq)=d*
(sin∠opq)/(sin(180-∠opq-(90-∠xoq))=d*(sin∠opq)/(sin(90+∠xoq-∠opq));
88.然后依据如下三角函数公式计算原始坐标xyz:
89.x=e*(cos∠xoq)=d*(sin∠opq)/(sin(90+∠xoq-∠opq))*(cos∠xoq);
90.y=e*(sins∠xoq)=d*(sin∠opq)/(sin(90+∠xoq-∠opq))*(sins∠xoq);
91.z=e*(tan∠toq)=d*(sin∠opq)/(sin(90+∠xoq-∠opq))*(tan∠toq)。
92.再综合计算触摸点位t原始坐标xyz:
93.根据上述方法所计算的左边摄像4、摄像机5计算三维触摸区域触摸点位t原始触摸坐标xyz,判定x是否大于三维触摸区域立方体长度(x轴方向)l/2,如果是则为有效原始触摸坐标;否者依据上述方法同样原理计算由右边摄像6、摄像机7计算三维触摸区域触摸点位t原始触摸坐标xyz。
94.最后将触摸点位t原始触摸坐标xyz按通用方法转换映射为显示面板或投影所适应的坐标体系基于应用所需的坐标x、y、z。
95.本发明实施案例由以上但不仅限上述实施案例组成,可以由本发明技术方案简单衍射出更多种实施案例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1