一种车牌检测识别装置
1.本实用新型属于车辆识别技术领域,具体涉及一种车牌检测识别装置。
背景技术:
2.车辆检测和识别是现代智能交通系统的重要组成部分,良好的车辆检测和识别系统能够极大的缓解日益严峻的交通压力。
3.当前,车辆检测和识别主要是采用图像处理的方式来进行检测和识别,其过程包括,先通过摄像头或照相机对车牌进行图像采集,在图像采集完成后,通过与样本图库的对比识别出车牌上的字符,进而得到车牌中的字符标号。这种图像采集方式严重依赖于摄像机/照相机的像素,由于光照强度会影响图像的对比度,所以对光照的要求较高。同时也容易让一些套牌车辆蒙混过关。
技术实现要素:
4.本实用新型提供了车牌检测识别装置,解决了现有技术中判定套牌车辆困难的问题。
5.本实用新型的基础方案为:一种车牌检测识别装置,其特征在于,包括:
6.激光扫描模块,用于扫描路过车辆的外形轮廓和记录路过车辆的通过时刻;
7.重力感应模块,用于感应路过车辆的整体重力;
8.图像采集模块,用于采集路过车辆的车牌区域的图像;
9.通信模块,用于与存有车辆标准信息的数据库连接,所述车辆标准信息包括车辆牌照信息、车辆外形信息、车辆限载信息;
10.处理模块,输入端与激光扫描模块、重力感应模块和图像处理模块输出端连接,同时所述输入端和输出端与通信模块连接;
11.报警模块,与所述处理模块的输出端连接,用于报警。
12.有益效果:本方案中采用激光扫描模块扫描车辆的外形轮廓,便于处理模块根据外形轮廓判断车辆车辆的型号;根据激光扫描模块记录的车辆通过的时刻,便于处理模块计算出车辆当前速度;通过重力感应模块检测出车辆的整体重力,即当前车辆的重力;图像采集模块采集到车牌区域的图像,便于处理模块根据所述图像通过加载的图像识别技术判断出当前车辆的车牌信息。同时,本方案中处理模块还能够根据所分析的车牌信息,根据通信模块从数据库中查找到对应该车牌信息的车辆外形信息和车辆限载信息,将所述车辆外形信息与自身采集的车辆外形轮廓进行对比,从而判断车牌是否与车型一致,并在不一致时,控制报警模块进行报警,即当前通过的车辆很有可能为套牌车辆。同样的,处理模块还能够将当前车辆的整体重力与车辆限载信息进行对比,并依据内容判断车辆是否超载,在判断结果为超载时,同样进行报警。
13.进一步,所述激光扫描模块具有多个,激光扫描模块之间的间隔距离为预设的固定距离。进一步,所述图像采集模块包括图像采集器和补光器,所述补光器安装与图像采集
器上,补光器包括光传感器和补光灯,补光灯根据光传感器所采集的光感启闭。
14.进一步,所述处理模块具有多个输出端口,每个输出端口连接报警模块的不同报警单元。
15.进一步,所述重力感应模块包括安装被测路段的压力传感器,所述压力传感器的输出端与所述处理模块的输入端连接。
16.进一步,所述装置还包括外壳,所述外壳中部开有凹槽,凹槽设置有所述重力感应模块,所述外壳的一侧设置有安装柱,安装柱位于所述凹槽的两侧,安装柱的顶端设有所述激光扫描模块和所述图像采集模块,所述外壳在所述凹槽一侧设置所述通信模块和报警模块,外壳内还设置有处理模块,所述处理模块与通信模块、报警模块、重力感应模块、激光扫描模块和图像采集模块连接。
17.进一步,所述外壳的横截面为楔形,且外壳斜坡的坡度小于15
°
。
18.进一步,所述报警模块包括告警灯和告警喇叭,报警时告警灯闪烁,告警喇叭播放告警音。
19.进一步,所述报警模块用于,报警时,通过通信模块向所述车辆前进方向的下一个拦截点发送告警信号。
20.进一步,所述报警模块包括可升降的拦截组件。
附图说明
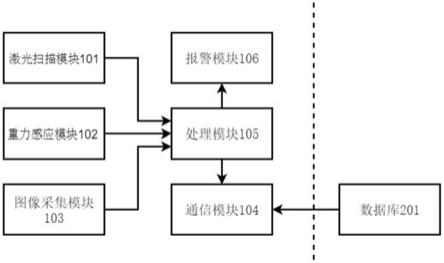
21.图1为本实用新型一种车牌检测识别装置实施例的模块示意图;
22.图2为本实用新型一种车牌检测识别装置实施例的结构示意图。
具体实施方式
23.下面通过具体实施方式进一步详细的说明:
24.实施例基本如附图1所示:
25.本实施方式提供了一种车牌检测识别装置,如图1所示,包括:激光扫描模块101,用于扫描路过车辆的外形轮廓和记录路过车辆的通过时刻;重力感应模块102,用于感应路过车辆的整体重力;图像采集模块103,用于采集路过车辆的车牌区域的图像;通信模块104,用于与存有车辆标准信息的数据库201连接,所述车辆标准信息包括车辆牌照信息、车辆外形信息、车辆限载信息;处理模块105,输入端与激光扫描模块、重力感应模块和图像处理模块输出端连接,同时所述输入端和输出端与通信模块连接;报警模块106,与所述处理模块105的输出端连接,用于报警。
26.采用激光扫描模块101扫描车辆的外形轮廓,便于处理模块105根据外形轮廓判断车辆车辆的型号;根据激光扫描模块101记录的车辆通过的时刻,便于处理模块105计算出车辆当前速度;通过重力感应模块102检测出车辆的整体重力,即当前车辆的重力;图像采集模块103采集到车牌区域的图像,便于处理模块105根据所述图像通过加载的图像识别技术判断出当前车辆的车牌信息。同时,本方案中处理模块105还能够根据所分析的车牌信息,根据通信模块104从数据库201中查找到对应该车牌的车辆外形信息和车辆限载信息,将所述车辆外形信息与自身采集的车辆外形轮廓进行对比,从而判断车牌是否与车型一致,并在不一致时,控制报警模块106进行报警,即当前通过的车辆很有可能为套牌车辆。同
样的,处理模块105还能够将当前车辆的整体重力与车辆限载信息进行对比,并依据内容判断车辆是否超载,在判断结果为超载时,同样进行报警。
27.在一些示例中,处理模块105根据激光扫描模块101记录的车辆通过的时刻,计算出车辆当前速度的方法有以下几种:
28.(1)在激光扫描模块101的数量只有一个时,激光扫描模块101在车头进入到扫描区域时进行第一次计时,计时为t1,激光扫描模块101在车身完全离开扫描区域时计时为t2,激光扫描模块所扫描出的车身长度为l;那么处理模块105计算出的车辆当前速度为v=d/(t2-t1)。
29.(2)在激光扫描模块101的数量具有至少为两个时,激光扫描模块101在车身完全离开扫描区域进行计时;车辆第一次遇到的激光扫描模块101的计时为t1,第二次遇到的激光扫描模块101的计时为t2
……
第n次遇到的激光扫描模块的计时为tn;
30.激光扫描模块相互之间通过激光来进行测距,已知激光速度为v
激光
,在邻近激光扫描模块101发射激光后的t时长后当前激光扫描模块101才接收到激光信息,这两个相邻的激光扫描模块101之间的距离d为,d=v
激光
*t;
31.对应的,处理模块105计算出的车辆当前速度为v=d/(t2-t1)。
32.其中,一些示例中,工作人员预先设定好相邻激光扫描模块101之间的距离为固定距离d,处理模块105计算出的车辆当前速度为v=d/(t2-t1)。
33.在一些示例中,所述图像采集模块包括图像采集器和补光器,所述补光器安装与图像采集器上,补光器包括光传感器和补光灯,补光灯根据光传感器所采集的光感启闭。
34.光传感器安装在图像采集器的四周,均匀分布;补光灯安装在图像采集器的上方,其照射方向为斜向下照射。在一些示例中,补光灯通过球形关节安装在图像采集器的上方,使用时,工作人员可以根据自身需求调节补光灯的灯光照射方向。
35.补光灯根据光传感器所采集到光感启闭,具体有以下两种实现方式:
36.(1)所有光传感器均会将自身感应到的光线发送给补光灯;光传感器的实质是光敏传感器,光敏传感器所在电路随着光线变化其输出的电压/电流也会发生变化,补光灯根据光敏传感器所在电路输出的电压/电流间接了解到光照的强弱。在任一光传感器发送的光感超过第一预设值时(光敏传感器所在电路输出的电流/电压超出第一预设值对应范围),补光灯启动;在任一光传感器发送的光感超过第二预设值时(光敏传感器所在电路输出的电流/电压超过第二预设值对应范围),补光等关闭。其中,第一预设值和第二预设值是由工作人员自行设定的。
37.(2)所有光传感器均会将自身感应到的光线发送给补光灯;光传感器的实质是光敏传感器,光敏传感器所在电路随着光线变化其输出的电压/电流也会发生变化,补光灯根据光敏传感器所在电路输出的电压/电流间接了解到光照的强弱。在平均后光传感器发送的光感超过第一预设值时(光敏传感器所在电路输出的电流/电压超出第一预设值对应范围),补光灯启动;在平均后光传感器发送的光感超过第二预设值时(光敏传感器所在电路输出的电流/电压超过第二预设值对应范围),补光等关闭。其中,第一预设值和第二预设值是由工作人员自行设定的。
38.在一些示例中,考虑到报警模块106的报警内容具有多样,将报警模块106设置为多种报警方式,每种报警方式对应一个报警单元。具体的,所述处理模块105具有多个输出
端口,每个输出端口连接报警模块的不同报警单元。处理模块105通过不同端口的输出值,从而具体地控制报警模块106中报警单元进行不同的报警。
39.例如,报警模块106包括四个告警单元;第一告警单元连接的是告警灯,处理模块105通过第一输出端口输出高电平时,告警灯点亮/频闪;第二告警单元连接的是告警喇叭,处理模块105通过第二输出端口输出高电平时,告警喇叭启动,向外播报出预设的告警语音;第三告警单元连接的信号发生器,处理单元105通过第三输出端口输出高电平时,信号发生器启动,向通信模块104发送含当前车辆牌照和车辆轮廓的信息作为告警信息,由通信单元转发给车辆前进方向的下一个拦截点,便于工作人员在下一个车辆拦截点进行违章车辆的识别;第四告警单元连接的可升降的拦截组件(如停车场收费处常见的路障关卡),处理单元105通过第四输出端口输出高电平时,控制拦截组件的拦截臂上升,从而拦截当前所测的车辆。
40.在一些示例中,所述重力感应模块包括安装被测路段的压力传感器,所述压力传感器的输出端与所述处理模块的输入端连接。
41.在一些示例中,如图2所示,装置还包括外壳,所述外壳中部开有凹槽,凹槽设置有所述重力感应模块201,所述外壳的一侧设置有安装柱110,安装柱110位于所述凹槽的两侧,安装柱110的顶端设有所述激光扫描模块101和所述图像采集模块103,所述外壳在所述凹槽一侧设置有固定柱120,固定柱120的顶部安装有通信模块104,固定柱的中部设置有告警模块106,告警模块106包括安装在中部的可活动拦截组件和设置在上部的告警灯/告警喇叭;外壳底部设置有空腔130,空腔内安装有处理模块105,所述处理模块105与通信模块104、报警模块106、重力感应模块102、激光扫描模块101和图像采集模块103连接。
42.进一步的,所述外壳的横截面为楔形,且外壳斜坡的坡度小于15
°
,便于车辆通过。
43.值得一提的是,本方案中,激光扫描模块101的具体结构可以参考中国专利cn214586947u中提及的激光车型识别仪的结构,即,一侧设有水平激光发射窗口18和垂直激光发射窗口19;通过以上设置,水平的激光对车辆的长度进行检测,垂直的激光对车辆的高度进行检测,从而得到车辆车型的信息。重力感应模块压力传感器广泛应用于载重测试中,例如中国专利cn201910675457.5中所提及的车辆载重测量传感器。图像采集模块中的图像采集器为摄像头。通信模块中采用天线,通过4g通信实现与数据库之间的数据互通。处理模块,这里采用微处理器mpu来实现,或者采用单片机实现,该单片机集成有图像识别芯片、mpu数据处理芯片。
44.以上所述的仅是本实用新型的实施例,方案中公知的具体结构及特性等常识在此未作过多描述,所属领域普通技术人员知晓申请日或者优先权日之前实用新型所属技术领域所有的普通技术知识,能够获知该领域中所有的现有技术,并且具有应用该日期之前常规实验手段的能力,所属领域普通技术人员可以在本技术给出的启示下,结合自身能力完善并实施本方案,一些典型的公知结构或者公知方法不应当成为所属领域普通技术人员实施本技术的障碍。应当指出,对于本领域的技术人员来说,在不脱离本实用新型结构的前提下,还可以作出若干变形和改进,这些也应该视为本实用新型的保护范围,这些都不会影响本实用新型实施的效果和专利的实用性。本技术要求的保护范围应当以其权利要求的内容为准,说明书中的具体实施方式等记载可以用于解释权利要求的内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1