一种碳卫星的自主任务规划方法与流程
1.本发明涉及航空航天技术领域,特别涉及一种碳卫星的自主任务规划方法。
背景技术:
2.为掌握全球二氧化碳浓度分布,我国已成功发射全球二氧化碳监测科学实验卫星,简称碳卫星。在轨期间,碳卫星可利用天底观测获取陆地上空二氧化碳柱浓度,以及利用耀斑观测获取海洋上空二氧化碳柱浓度。
3.在天底观测期间,由于海面信噪比不满足观测需求,导致海洋上空的观测数据为无效数据,因此,最终碳卫星天底观测模式下获取的有效数据需剔除海洋无效数据。
4.但是,碳卫星自身并不能根据星下点地面属性(海洋或陆地)进行选择性开机观测,而是采用光照区整轨开机观测,观测数据下传地面后,再由地面处理系统将海洋无效数据剔除。由于海洋面积占到地球表面总面积的71%,这就导致卫星存储、能源、数传资源和地面接收、存储、处理资源的极大浪费。
技术实现要素:
5.针对现有技术中的部分或全部问题,本发明提供一种碳卫星的自主任务规划方法,其在检测到卫星由阴影区切换至光照区时,触发卫星自主任务规划,所述卫星自主任务规划包括:
6.确定规划时间序列,所述规划时间序列中包含若干个时间节点;
7.对各个时间节点,进行星下点地面属性预测,并根据预测结果设置观测弧段;以及
8.根据所述观测弧段,确定载荷开关机时序。
9.进一步地,卫星由阴影区切换至光照区的检测包括:
10.当检测到太阳矢量与地心矢量夹角大于光照阴影临界夹角的连续时长超过指定数值时,判断卫星由阴影区切换至光照区。
11.进一步地,所述规划时间序列的确定包括:
12.将卫星由阴影区切换至光照区第一预设时间后的时间点设置为初始时间节点;以及
13.初始时间节点起,第二预设时间后的时间点设置为第二个时间节点,依次类推,设置规划时间序列中的时间节点,直至卫星离开可观测弧段。
14.进一步地,所述第一预设时间为10分钟。
15.进一步地,所述第二预设时间为10秒。
16.进一步地,任一所述时间节点的星下点地面属性的预测包括:
17.通过星上轨道递推,预测所述时间节点的轨道位置,并转换为地理经纬度;以及
18.根据全球陆海二值化模型,判断距离所述地理经纬度最近的陆海模型网格点的属性,并以此代表所述时间节点的星下点地面属性的预测值。
19.进一步地,所述全球陆海二值化模型由全球数字高程模型进行二值化建模得到。
20.进一步地,所述观测弧段的设置包括:
21.若连续n个时间节点预测得到的星下点地面属性为海洋,则将所述连续n个时间节点所在弧段设置为不观测弧段,其与弧段设置为观测弧段,其中,所述n值为预设值。
22.进一步地,若在可观测弧段内设置的不观测弧段总数k超过m,则将各个不观测弧段按照弧长,从长到短排序,并将排序第m+1至k的不观测弧段设置为观测弧段。
23.进一步地,载荷开关机时序的确定包括:
24.在观测弧段内,载荷开机;以及
25.在不观测弧段内,载荷关机。
26.本发明提供的一种碳卫星的自主任务规划方法,在每轨进入光照区的起始时刻,对后续这一轨的光照区的星下点地面属性进行预测,并根据预测结果规划载荷的开关机序列,实现天底观测模式下仅在陆地上空进行开机观测,避免海洋无效观测,进而有效节约卫星存储、能源、数传资源和地面接收、存储、处理资源。
附图说明
27.为进一步阐明本发明的各实施例的以上和其它优点和特征,将参考附图来呈现本发明的各实施例的更具体的描述。可以理解,这些附图只描绘本发明的典型实施例,因此将不被认为是对其范围的限制。在附图中,为了清楚明了,相同或相应的部件将用相同或类似的标记表示。
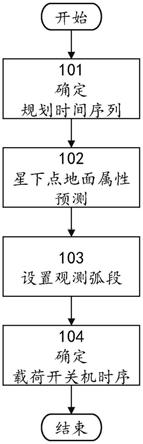
28.图1示出本发明一个实施例的一种碳卫星的自主任务规划方法的流程示意图;
29.图2示出某卫星可观测弧段的示意图。
具体实施方式
30.以下的描述中,参考各实施例对本发明进行描述。然而,本领域的技术人员将认识到可在没有一个或多个特定细节的情况下或者与其它替换和/或附加方法一起实施各实施例。
31.在本发明中,各实施例仅仅旨在说明本发明的方案,而不应被理解为限制性的。
32.在本发明中,除非特别指出,量词“一个”、“一”并未排除多个元素的场景。
33.在本说明书中,对“一个实施例”或“该实施例”的引用意味着结合该实施例描述的特定特征、结构或特性被包括在本发明的至少一个实施例中。在本说明书各处中出现的短语“在一个实施例中”并不一定全部指代同一实施例。
34.在此还应当指出,在本发明的范围内,“相同”、“相等”、“等于”等措辞并不意味着二者数值绝对相等,而是允许一定的合理误差,也就是说,所述措辞也涵盖了“基本上相同”、“基本上相等”、“基本上等于”。
35.现有的碳卫星通常运行于700km的轨道高度,且其轨道为低轨太阳同步圆轨道,且轨道回归周期16天。因此,目前碳卫星在轨多采用16天天底观测+16天耀斑观测的工作模式,其中,天底观测主要用于获取陆地上空二氧化碳柱浓度,以及耀斑观测则用于获取海洋上空二氧化碳柱浓度。由于海洋的海面信噪比通常不满足天底观测的观测需求,因此,在天底观测期间,海洋上空的观测数据为无效数据。
36.为了尽可能避免海洋无效观测,本发明提供一种碳卫星的自主任务规划方法,其
在每轨进入光照区的起始时刻,对后续这一轨的光照区的星下点地面属性进行预测,并根据预测结果来规划可观测弧段内的载荷开关机序列。
37.其中,所述可观测弧段是指光照区中,具备天底观测的光照条件的弧段。由于要达到观测必须的信噪比,必须要获得充足能量的太阳光,因此,通常天底观测目标点的太阳天顶角应小于80度。以碳卫星所处的典型轨道为例,图2示出卫星可观测弧段的示意图。如图2所示的卫星,其运行于700km低轨太阳同步圆轨道,其轨道周期约97min,光照区时长约63min。则根据天底观测中太阳天顶角的要求及轨道参数,可以计算得到,如图2所示的卫星,其在进入光照区后的10min起,至再次进入阴影区的前10min为止,具备天底观测的光照条件,因此,可将该时段视为可观测弧段,对应的可观测弧段总时长约为43min。
38.下面结合实施例附图,对本发明的方案做进一步描述。
39.图1示出本发明一个实施例的一种碳卫星的自主任务规划方法的流程示意图。如图1所示,一种碳卫星的自主任务规划方法,包括:
40.首先,在步骤101,确定规划时间序列。在检测到卫星由阴影区切换至光照区时,触发卫星自主任务规划,所述卫星自主任务规划首先需要确定规划时间序列。在本发明的一个实施例中,所述规划时间序列包含位于可观测弧段内的若干个时间节点。具体而言,在本发明的一个实施例中,所述规划时间序列的确定包括:
41.将卫星由阴影区切换至光照区的时刻记为则将第一预设时间后的时间点设置为初始时间节点tp1,所述第一预设时间等于卫星进入光照区后到具备天底观测的光照条件时所需的时间,以典型的700km低轨太阳同步圆轨道为例,所述第一预设时间取值为10分钟,则有以及
42.初始时间节点tp1起,第二预设时间后的时间点设置为第二个时间节点tp2,依此类推,设置规划时间序列中的其他时间节点
43.tp3至tpn,直至卫星离开可观测弧段,其中n值根据可观测弧段的时长及各个时间节点间的间隔确定。在本发明的一个实施例中,各个时间节点的间隔相等,且取值为10秒,以典型的700km低轨太阳同步圆轨道为例,卫星在可观测弧段共43分钟,因此,按照每个时间节点间隔均为10秒计算,所述规划时间序列中包含259个时间节点(t
p1
,t
p2
,
…
,t
p259
),其中,中,应当理解的是,在本发明的其他实施例中,每个时间节点间的间隔也可为其他数值,且各个时间节点间的间隔可以相等或不等;
44.在本发明的一个实施例中,卫星在阴影区及光照区的判断如下:
45.若检测到太阳矢量与地心矢量夹角θ
s_u
大于光照阴影临界夹角θ
s_u_yuzhi
的连续时长超过指定数值,则判断卫星由阴影区切换至光照区,在本发明的一个实施例中,所述指定数值取值为10秒;以及
46.若检测到太阳矢量与地心矢量夹角θ
s_u
小于光照阴影临界夹角θ
s_u_yuzhi
的连续时长超过指定数值时,则判断卫星由光照区切换至阴影区,在本发明的一个实施例中,所述指定数值取值为10秒;
47.其中,所述太阳矢量与地心矢量夹角θ
s_u
取值范围为0
°
到180
°
之间,且满足:
[0048][0049]
其中,
[0050]
r
i
=(r
x
,r
y
,r
z
)为当前时刻,卫星在j2000惯性系下的位置矢量;以及
[0051]
r
s
为j2000惯性坐标系中的太阳矢量位置矢量;以及
[0052]
光照阴影临界夹角θ
s_u_yuzhi
根据地球最小半径r
e_min
以及卫星地心距r
sat
计算得到:
[0053][0054]
其中,
[0055]
r
e_min
取值6356km;以及
[0056][0057]
接下来,在步骤102,星下点地面属性预测。对规划时间序列中的各个时间节点,分别进行星下点地面属性预测,并按时间顺序排序,得到星下点地面属性的预测值序列。在本发明的一个实施例中,所述星下点地面属性的预测值序列为一组由0、1组成的数字序列,其中,0代表对应时间节点的星下点地面属性预测为海洋,1代表对应时间节点的星下点地面属性预测为陆地。在本发明的一个实施例中,任一所述时间节点t
pl
,(l∈[0,n])的星下点地面属性的预测包括:
[0058]
通过星上轨道递推,预测所述时间节点t
pl
的轨道位置,并将所述轨道位置转换为地理经纬度(j
pl
,w
pl
);以及
[0059]
根据全球陆海二值化模型,判断距离所述地理经纬度(j
pl
,w
pl
)最近的陆海模型网格点的属性,并以此代表所述时间节点t
pl
的星下点地面属性的预测值。其中,所述全球陆海二值化模型由全球数字高程模型进行二值化建模得到,具体而言,所述全球陆海二值化模型的构建包括:
[0060]
利用全球数字高程模型,绘制全球高程地图,在本发明的一个实施例中,所述全球数字高程模型的网格精度为0.25
°×
0.25
°
,且对应的高程数据矩阵大小为720
×
1440,数据类型为double型,因此,高程数据大小约为8mb;以及
[0061]
对全球数字高程模型进行二值化建模,陆地表示为1,海洋表示为0,由于星上存储资源有限,同时在本发明提供的碳卫星的自主任务规划方法中,无需知道每个网格点的精确高程值,仅需知道其是海洋或陆地即可,因此,二值化建模后的模型即可满足要求,二值化建模后,每个网格点仅需1bit即可,因此,二值化建模后的全球陆海二值化模型的数据量约为0.124mb,仅为原数据量的1/64;
[0062]
接下来,在步骤103,设置观测弧段。根据步骤102得到的星下点地面属性的预测值序列,设置观测弧段,在本发明的一个实施例中,所述观测弧段的设置包括:
[0063]
若所述星下点地面属性的预测值序列中,存在至少n个连续的“0”元素,即至少连续n个时间节点预测得到的星下点地面属性为海洋,则表示卫星在较长一段时间段内的星下点均为海洋,因此,可以考虑对应的时间段停止天底观测,因此,可将所述连续n个时间节点所在弧段设置为不观测弧段,其余弧段设置为观测弧段,其中,所述n值为预设值,在本发明的一个实施例中,所述n取值为6,当各时间节点的间隔为10秒时,则当卫星在不少于1分
钟的时间段内星下点均为海洋时,该弧段设置为不观测弧段,其余弧段设置为观测弧段。
[0064]
考虑到载荷开关机不宜过于频繁,因此,在本发明的又一个实施例中,一旦所述星下点地面属性的预测值序列中,不少于n个连续的“0”元素的情况出现超过指定次数m,即在可观测弧段内设置的不观测弧段总数k超过m时,则先将各个不观测弧段按照弧长,从长到短排序,然后将排序第m+1至第k的不观测弧段设置为观测弧段。在本发明的一个实施例中,所述m取值为3,以n取值为6,且各时间节点的间隔为10秒时为例,当所述星下点地面属性的预测值序列中,不少于6个连续“0”元素的情况超过3次时,筛选出最长的3次弧段,设置为不观测弧段,其余弧段设置为观测弧段;以及
[0065]
最后,在步骤104,确定载荷开关机时序。根据所述观测弧段,确定载荷开关机时序,具体而言,是在观测弧段内,载荷开机,以及在不观测弧段内,载荷关机。
[0066]
本发明提供的一种碳卫星的自主任务规划方法,在每轨进入光照区的起始时刻,对后续这一轨的光照区的星下点地面属性进行预测,并根据预测结果规划载荷的开关机序列,实现天底观测模式下仅在陆地上空进行开机观测,避免海洋无效观测,进而有效节约卫星存储、能源、数传资源和地面接收、存储、处理资源。
[0067]
尽管上文描述了本发明的各实施例,但是,应该理解,它们只是作为示例来呈现的,而不作为限制。对于相关领域的技术人员显而易见的是,可以对其做出各种组合、变型和改变而不背离本发明的精神和范围。因此,此处所公开的本发明的宽度和范围不应被上述所公开的示例性实施例所限制,而应当仅根据所附权利要求书及其等同替换来定义。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1