基于滑动窗口相位恢复的针对暗场成像的偏差校正的制作方法
1.本发明涉及暗场图像处理系统、暗场图像处理方法、成像设备、计算机可读介质以及计算机程序单元。
背景技术:
2.暗场成像引起了人们的极大兴趣,特别是在医学领域中。暗场(“dax”)成像是x射线成像的一种类型。暗场成像中的对比度与x射线所经历的小角度散射的量有关。
3.a.yaroshenko等人在“pulmonary emphysema diagnosis with a preclinical small-animal x-ray dark-field scatter-contrast scanner”(radiology,vol.269,no 2,2013年11月)中报道了用小鼠进行的实验性暗场成像。
4.dax成像可以用于检测肺部疾病,如copd(慢性阻塞性肺病)、纤维化等。特别是对于copd的早期检测,可能需要定量测量。
5.已经注意到,dax有时会图像被统计偏差而破坏。
技术实现要素:
6.因此,可能需要改进的dax成像。
7.本发明的目的通过独立权利要求的主题来解决,其中,在从属权利要求中并入了其他实施例。应当注意,本发明的以下描述的方面同样适用于暗场图像处理方法、成像设备、计算机可读介质以及计算机程序单元。
8.根据本发明的第一方面,提供了一种用于暗场图像处理的系统,包括:
9.一个或多个输入接口,其用于以第一分辨率接收对象的第一暗场图像,并且以高于所述第一分辨率的第二分辨率接收所述对象的第二暗场图像;以及
10.组合器,其被配置为计算地组合来自所述第一图像的第一信息和来自所述第二图像的第二信息以获得增强的暗场图像。
11.所述组合器可以计算地组合来自高分辨率图像和低分辨率图像的图像信息,以计算增强/组合图像的相应像素值。组合器可以逐像素地进行。组合可以仅在图像域中完成或/可以使用(空间)频率域操作。
12.在一些实施例中,组合空间频率内容。所述第一信息处于第一空间频率范围,并且所述第二信息处于第二空间频率范围,其中,所述第一空间频率低于所述第二空间频率。例如,所述第一图像可以被滤波/处理以表示低(空间)频率内容,而所述第二图像被滤波/处理以表示(更)高频率内容,并且如此滤波/处理的两幅图像可以相加或通过其他代数组合以其他方式组合。例如,可以对第一图像进行低通滤波,并且可以对第二图像进行高通滤波,并且然后将两幅经滤波的图像相加以获得增强图像。
13.可以通过投影测量数据的不同计算处理来获得第一图像和第二图像的不同分辨率。
14.具体地,在一个实施例中,所述第一图像是由暗场图像生成器预先生成的。所述暗
场图像生成器实施为图像生成算法。所述暗场图像生成器被配置为:基于包括由x射线成像装置采集的所述对象的测量结果的投影数据,通过针对给定目标图像位置基于针对所述目标图像位置的测量结果和针对所述目标图像位置的邻域中的一个或多个其他图像位置的一个或多个测量结果计算图像值来生成所述第一暗场图像。因此,所述暗场图像生成器可以被理解为以窗口处理的方式操作。因此,处于更低分辨率的第一图像也可以被理解为第二(更高分辨率)图像的平滑版本。第二图像可以在没有这样的窗口处理的情况下、或在具有比在计算第一图像时更小的窗口处理/邻域的情况下生成。
15.暗场图像生成器可以是系统的一部分。
16.在替代的或至少不同的实施例中,在由暗场图像生成器生成第一暗场图像之前,由低通滤波器对投影数据进行低通滤波。因此,代替使用针对第一图像的窗口处理图像生成(或除了使用针对第一图像的窗口处理图像生成之外),不需要这样的窗口处理。投影数据首先诸如通过低通滤波或其他平滑来进行滤波,并且图像生成器然后被用于基于经滤波的投影数据计算第一图像。第二图像可以根据未经滤波的投影数据、或者根据在更小程度上或更不积极地滤波的投影数据来生成。
17.该系统还可以包括所述低通或平滑滤波器作为部件。
18.因此,通常,如本文所设想的,本文所使用的第一和第二图像的不同分辨率可以由平滑或其他计算方案(诸如当计算给定像素值时使用针对相邻像素的投影或图像域中的数据的卷积)引起。处理可以在空间和/或频率域中进行。
19.通过投影域的低通滤波/平滑引起更低分辨率可以被在非狭缝扫描成像系统中使用。如果使用狭缝扫描成像系统,则窗口处理图像生成优于相对于投影域中的滤波。
20.在一些实施例中,所述暗场图像生成器实施相位恢复算法。
21.在实施例中,相位恢复算法基于信号模型。相位恢复算法或更一般地任何合适的图像生成算法被配置为通过适配一个或多个拟合变量来将信号模型拟合到测量。至少一个这样的拟合变量/参数可以表示暗场信号贡献。通过将模型的拟合变量/参数适配到测量数据,由相位恢复算法或更一般地由图像生成算法执行拟合操作。
22.在实施例中,所述成像装置包括成像促进器结构,所述成像促进器结构被配置为将x射线辐射调制成条纹图案。
23.在实施例中,所述成像促进器结构包括一个或多个光栅。
24.在实施例中,所述成像装置是扫描类型的,诸如狭缝扫描系统。
25.在另一方面中,提供了一种暗场图像处理方法,包括以下步骤:
26.以第一分辨率接收对象的第一暗场图像,并且以高于所述第一分辨率的第二分辨率接收所述对象的第二暗场图像;以及
27.计算地组合来自所述第一图像的第一信息和来自所述第二图像的第二信息以获得增强的暗场图像。
28.在优选实施例中,所述第一暗场图像由暗场图像生成器生成,所述暗场图像生成器被配置为基于包括由所述对象的x射线成像装置采集的测量的投影数据,通过针对给定目标图像位置基于针对所述目标图像位置的测量结果和针对所述目标图像位置的邻域中的一个或多个其他图像位置的一个或多个测量结果计算图像值来生成所述第一暗场图像。所述第一图像因此由窗口处理暗场图像生成器来生成。
29.根据另一方面,提供了一种计算机程序单元,当被至少一个处理单元运行时,所述计算机程序单元适于引起所述处理单元执行所述方法的步骤中的至少一个步骤。
30.在另一方面中,提供了一种其上存储有所述程序单元的计算机可读介质。
31.所提出的系统有助于解决的特定问题是,在dax成像中,暗场信号的估计通常是非线性过程,并且因此,估计值遭受系统误差(在本文中称为“(统计)偏差”)。当估计基于包括相对高的噪声水平的探测器测量结果时,偏差是特别显著的。在胸部成像中可以预期这样的噪声测量结果,例如在肺的尾端,在那里它与腹部重叠。
32.虽然在其他领域中可以通过对测量数据进行低通滤波来处理偏差,但是这种方法在诸如狭缝扫描(dax)成像系统的扫描成像系统中通常不是优选的,因为这样的成像系统依赖于相对高频的条纹图案。因此,在投影域中对测量数据进行低通滤波将意味着条纹可见度的损失,这最终使信噪比劣化。低通滤波与狭缝扫描组合的另一问题是它有效地减小了帧宽度,导致额外的信噪比(snr)劣化。最后,“普通”低通滤波使最终图像的空间分辨率劣化,并且精细细节将会丢失。
33.在每像素的基础上工作的其他偏差校正方案倾向于增加噪声。
34.所提出的方法和系统允许在维持snr的同时减小偏差。
35.当计算针对给定图像位置的更低分辨率暗场信号/值时通过组合来自其他图像位置的测量结果类似于平滑操作。虽然低分辨率输入图像的使用有助于减小偏差,但是空间分辨率的损失可能是不期望的。为了解决分辨率损失,所提出的方法包括通过使用空间频率分析并通过组合来自两个输入图像(低分辨率图像和高分辨率图像)的高频图像信息和低频图像信息以得到增强图像来至少近似地恢复分辨率的步骤。特别地,低频图像信息从低分辨率图像获得,因为它特别是低频的,即,偏差更显著的大规模结构。
36.在空间频率分析中,所提出的系统识别两个频率范围。频率范围可以在频率域中识别。系统可以执行傅里叶逆变换或类似的操作以从频率域逆变换到图像域,从而通过组合得到增强的暗场图像。
37.本文提及的“频率”涉及图像中的空间频率。
[0038]“相位恢复(算法)”是指基于信号模型的任何算法或要不然是指根据测量的强度计算相位信号与暗场信号的组合的任何算法。由于频移与由小角度散射产生的暗场信号之间的彼此相互作用,因此在相位恢复算法中,通常联合计算两个信号(暗场和相位)。尽管“相位恢复”是已确立的名称,但是它也可以在本文中被称为“暗场信号恢复”。相位恢复操作可以通过成像促进器结构来促进,诸如光栅、结构化掩模、编码孔径板、晶体等、或具有与成像x射线束相互作用以实现不同的测量以便施加更多约束的周期性或非周期性子结构的其他至少部分阻挡辐射的结构。这有助于解决模糊性或者相位恢复中固有的不适定性。
[0039]“图像位置”是指探测器上的原生像素位置、或者定义要生成或“重建”暗场图像的图像域中的位置的几何射线(从x射线源延伸)的位置。图像域是空间的一部分,通常是表面,诸如平面。图像域包括要重建的图像的图像值被分配给的图像位置。
[0040]“图像生成(算法)”特别地包括相位恢复算法或其他图像生成方案,其被配置为从一系列投影图像中提取或分离暗场图像和/或相位对比图像。可以通过将成像促进器结构包括到x射线成像装置中来促进对一系列投影图像的采集(在本文中也称为“相位步进”)。图像生成算法可以包括优化测量数据(投影图像)与信号模型的拟合。优化是为了改善对根
据信号模型的值与测量数据之间的失配进行量度的代价函数。
[0041]
成像的“对象”是有生命的并且包括人类或动物或其一部分,或对象是无生命的,诸如安全筛查系统中的行李的物品或非破坏性材料测试中的样本对象。
[0042]“用户”包括操作成像装置和/或系统以对对象进行成像的人(例如,健康护理专业人员)。
附图说明
[0043]
现在将参考以下未按比例(除非另作申明)的附图来描述本发明的示例性实施例,其中:
[0044]
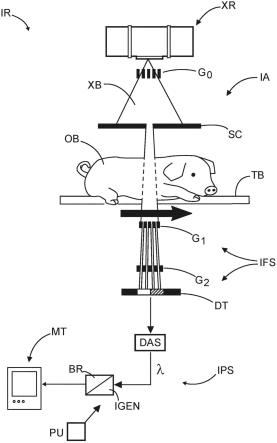
图1是被配置用于相位对比和/或暗场成像的x射线成像装置的示意性框图;
[0045]
图2是用于暗场成像的偏差校正系统的示意性框图;并且
[0046]
图3是用于暗场成像中的偏差校正的方法的流程图。
具体实施方式
[0047]
参考图1,示出了包括计算机化图像处理系统ips和x射线成像装置ia(“成像器”)的成像设备ir的示意性框图。x射线成像装置被配置用于暗场x射线(“dax”)成像和/或相位对比(“φ”)成像。
[0048]
图像处理系统ips可以在一个或多个处理单元pu(诸如一个或多个计算机、服务器等)上运行一个或多个软件模块或例程。ips可以被布置在成像器ia的外部和远程,或图像处理系统ips被集成到成像器ia中或与成像器ia相关联,例如集成到成像器ia的一个或多个处理单元pu(诸如工作站)中。图像处理系统ips可以被实施在分布式架构中,以通过适当的通信网络服务于一组成像器。图像处理系统ips的一些或所有部件可以被布置在诸如适当编程的fpga(现场可编程门阵列)的硬件中或被布置为硬连线集成电路(ic)芯片。
[0049]
广义地,图像处理系统ips包括将由成像器ia采集的投影图像λ处理成暗场和/或相位对比图像的图像生成器igen。投影图像λ在本文中有时被称为“帧”。图像处理系统ips的图像生成器igen至少部分地包括和/或耦合到偏差校正/减小设施或(子)系统br。由图像生成器igen与偏差减小设施br协作提供的偏差校正图像然后可以被显示在显示单元mt上或可以被存储在存储器db中以供稍后查看或使用,或它可以以其他方式进一步处理。
[0050]
尽管在图1中设想了成像装置ia经由无线或有线连接将投影图像λ直接供应到图像处理系统ips,但是可能并不是在所有实施例中都这样。例如,投影图像λ可以首先被存储在诸如医院信息系统(his)的图片归档系统(pacs)等的存储器中,并且要处理的图像在之后的阶段(例如,在用户请求时)由ips检索并且然后被处理。
[0051]
通常,成像装置ia包括x射线源xr、x辐射敏感探测器dt以及被布置在源xr与探测器dt之间的成像促进器结构ifs(诸如干涉仪)。x射线源xr生成可由探测器dt检测的x射线射束xb。成像促进器结构ifs是如下的设备或一组设备,其允许将x射线射束xb折射和/或射束xb的小角度散射转换成探测器dt处的强度调制从而促进将所述调制解析为暗场和/或相位对比图像信号并且如果期望的话则解析为衰减图像信号。
[0052]
在下文中,将主要参考包括干涉仪作为成像促进器结构ifs的干涉成像装置ia,但是这不排除使用其他(特别是非干涉成像促进器结构ifs)的实施例。这样的非干涉成像促
进器结构ifs包括例如编码孔径系统。通常,暗场或相位对比可以通过成像促进器结构ifs对入射的成像x射线射束赋予周期性波前调制并且通过x射线探测器dt测量由要被成像的对象ob引起的所产生的波前的变化来获得。
[0053]
现在更详细地转到成像装置ia,这可以被配置用于2d成像(诸如放射线摄影装置)或用于3d成像(诸如ct扫描器)。在x射线源xr与探测器dt之间,定义了要被成像的对象ob(例如,对象的胸部)在成像期间所位于的成像区域。在成像区域中,布置有作为成像促进器结构ifs的一个实施例的干涉仪。干涉仪包括单个、两个或三个(或更多个)光栅结构。如上所述,干涉仪仅是图像促进器结构ifs的一个实施例,并且我们将在下面主要参考该实施例,其中应理解,本公开的原理不限于干涉测量,而是可以容易地扩展到其他基于光栅或非基于光栅的结构,作为如上所述的图像促进器结构ifs的其他实施例。
[0054]
继续参考图像促进器结构ifs的(非限制性)干涉测量实施例,光栅的周期性、纵横比等为使得它们引起x射线射束的衍射和/或实现刚好足够的相干性,使得可以检测或导出小角度散射。可以使用吸收光栅和相位光栅。在一个实施例中,通过光刻或在硅晶片中切割来形成光栅,以限定沟槽的周期性图案。沟槽之间的间隙可以填充有用于吸收光栅的铅或金。代替这种光栅,可以使用晶体结构。
[0055]
更详细地并且在一个实施例中,吸收光栅结构g2被布置在探测器dt与对象ob之间,而另一光栅g1(相位光栅)被布置在对象ob与x射线探测器dt之间。在一些实施例中,在x射线源不能生成原生足够相干辐射的情况下,还存在被布置在x射线源xr处的额外光栅g0。如果x射线源产生非相干辐射(通常是这种情况),则x射线源处的(吸收)光栅g0(也被称为源光栅)将从x射线源出来的x辐射变换为至少部分地相干的辐射射束xb。还设想了相反的几何配置,其中g1被放置在对象ob的上游,即在xr与ob之间。
[0056]
至少部分相干的辐射射束xb传播通过成像区域并与干涉仪ifs和患者ob相互作用。在所述相互作用之后,然后在探测器dt的辐射敏感像素元件处以电信号的形式检测辐射。数据采集电路das将电信号数字化为投影(原始)图像数据λ,该投影(原始)图像数据λ然后由ips用以下更加详细解释的方式进行处理。
[0057]
成像装置ia可以是全视场(fov)类型,其中探测器是平板类型。在全fov成像系统中,探测器dt的尺寸和ifs的尺寸对应于期望的fov。替代地,探测器dt和成像促进器结构ifs可以小于预期的fov,例如在如图1所示的狭缝扫描系统中。在这些系统的一些中,探测器包括一系列离散的探测器线。探测器线被安装在扫描臂上,以在不同的槽位置中跨预期的fov进行扫描。
[0058]
如图1中所示的狭缝扫描系统比全fov系统更具代价效益,因为它们需要更小的探测器和更小的光栅ifs。光栅ifs被安装在探测器上方的扫描臂上,并且跨fov均等地扫描。在替代的狭缝扫描系统中,尽管探测器dt具有与期望的fov相同的尺寸,但是光栅更小,并且准直sc用于根据准直在任何一时间仅扫描fov的部分(在“狭缝”中)。在具有非移动平板探测器的全fov系统和狭缝扫描系统中,像素位置与穿过成像区域的假想几何射线之间存在简单的一对一关系以限定成像几何配置。射线从x射线源xr的焦点延伸并且在相应像素位置处与探测器平面相交。几何射线中的每一条对应于像素中的相应的不同的单个像素。在具有较小探测器的一些狭缝扫描系统中不存在这种简单的关系,其中在扫描期间,每条几何射线由不同“狭缝”中的许多不同像素看到。来自不同像素的信号然后由用于任何单个
几何射线的合适逻辑一起处理。
[0059]
图像生成器igen输出暗场信号和/或相位对比信号作为分别形成暗场图像和相位对比图像的图像值的相应阵列。这些图像值或像素值分别表示针对相应几何射线的暗场信号的对比度和x辐射在行进通过对象ob时所经历的相位变化。
[0060]
通常,当x辐射与物质相互作用时,其经历衰减和折射两者,并且因此经历相变。另一方面,衰减可以分解成源自光电吸收的衰减和来自散射的衰减。散射贡献又可以分解为康普顿散射和瑞利散射。为了暗场成像的当前目的,感兴趣的是小角度散射,其中“小角度”意味着散射角度如此小以至于散射光子仍然到达与它在没有被散射的情况下将达到的像素相同的像素。
[0061]
暗场贡献能够被建模为可见度v=v0*e-∫ε(z)dz
,其中,ε是患者ob的漫射性质的空间分布,并且积分是沿着x射线射束路径执行的,并且v0是在对象相互作用的情况下的参考可见度(在校准测量中记录)。然后,在暗场图像中记录的暗场信号为δ=v/v0。
[0062]
传统的放射线摄影系统通常不能将检测到的信号解析为暗场贡献。然而,通过使用如图1所示的干涉仪ifs,或通过使用其他成像促进器结构ifs,可以将这些贡献转换成条纹的强度图案,所述条纹的强度图案可以由图像生成器igen分析以获得相位对比和/或dax图像。
[0063]
现在更详细地转向图像生成器igen,这对在相位步进操作中获得的一系列投影图像进行操作。基于该记录的一系列投影图像,图像生成器igen计算地将一系列投影数据中的检测到的条纹图案解析为三个贡献或信号分量,即折射贡献(也被称为相位对比信号)、暗场信号分量和剩余衰减分量。
[0064]
由于这三种对比度机制一起作用,图像生成器igen对检测到的一系列强度的信号处理在三个信号通道(相位对比、暗场和衰减)中进行。
[0065]
在上述类型的成像系统中,如下地实现暗场/相位对比成像的能力:在相位步进操作期间,在探测器dt处采集投影数据作为给定固定投影方向的系列。条纹的相位通常步进超过360
°
。相位步进操作通常通过引起x射线射束与图像促进器结构ifs或其部件之间的运动来实现。例如,在一个实施例中,分析器光栅g2(即,被布置在对象与探测器之间的光栅)相对于x射线射束的光轴横向移动(“扫描”)。替代地,也可以通过如图1中移动患者ob或通过移动x射线源或通过移动另一光栅等来实现相位步进。这种相位步进运动引起条纹图案的变化,该条纹图案的变化继而可以针对运动的每个步进被记录在对应的系列中。对于每条几何射线,该系列测量mj形成相关联的相位曲线。相位曲线通常具有正弦形状,并且已经发现,每条相位曲线对感兴趣的量(特别是暗场信号)以及衰减和相位变化进行编码。
[0066]
更详细地,可以分别分析每个像素/几何射线的相位曲线,例如通过拟合到如在的pfeiffer等人的“hard-x-ray dark-field imaging using a grating interferometer”(发表于nature materials 7,第134-137页(2008))中描述的正弦信号模型,以实现图像生成。优选地,在三通道正弦模型中包括至少三个拟合参数/变量。三个拟合参数分别表示三个贡献,相位对比、暗场信号和衰减。正弦模型由图像生成器igen拟合到相位曲线,以便特别地计算dax和/或φ图像以及衰减(也称为“透射”)图像,但这在本文中是较不感兴趣的。可能需要计算明显多余的透射图像以正确地考虑三种对比度效果,因为否则在dax和/或φ通道中导致不正确的贡献。
[0067]
优化流程用于将测量的一系列投影拟合到模型。该流程可以根据代价函数来理解,并且拟合操作可以被公式化为优化问题。还设想了任何合适的优化方案,诸如梯度下降、共轭梯度、newton-raphson、随机梯度、最大似然方法、其他统计技术等。也可以使用非分析方法,诸如神经网络或其他机器学习技术。
[0068]
通常,针对信号模型sm的优化问题在要生成的dax图像的每个图像位置(像素或几何射线)j具有以下结构:
[0069][0070]
其中,是至少三通道调制器函数,其描述三种对比度机制如何组合以将入射的(未受干扰的)辐射x调制并变换成测量数据λ,并且||.||是合适的相似性量度,例如p-norm、(平方)欧氏距离等。函数f,目标函数(在这种情况下,代价函数)对信号模型sm有多好地“解释”(或“拟合”)测量数据π进行量度,并且优化任务是如何最佳地选择模型的参数(t,δ,φ),其中在代价或误差的情况下,相似性量度||.||量化拟合的良好度。优化中的任务是通过调整参数(t,δ,φ)来改善代价函数。在这种情况下,参数将在优化中被调整,使得由代价函数f返回的值(“代价”)减小。在信号模型sm中可以使用多于三个通道,这取决于希望考虑的对比度机制的数量。在(1)中,f可以是残差(项)的函数。每个残差量化给定投影图像与其在模型sm下的预测的相应偏差或代价。
[0071]
更具体地,在一个实施例中,作为(1)的特殊情况,每个图像位置j(像素或几何射线)使用以下分析信号模型来优化f2:
[0072]
f2(tj,δj,φj)=∑iw
i,j
(m
i,j-s
ijiij-tji
i,j
(1+v
i,j
δjcos(φ
j-α
i,j
)))2ꢀꢀꢀ
(2)
[0073]
其中,mi是测量的数据(从λ取得),未受干扰的辐射“x”由ij、vj和αj表示,分别是空白扫描强度、可见性和相位。tj、δj和φj分别是上述sm()的三个对比度调制器,即:该图像点j的透射率、暗场和微分相位。w
i,j
是任选的统计权重,通常被选择为等于测量数据m
i,j
的逆方差或与测量数据m
i,j
的逆方差成比例,在实施例中,w
i,j
=1/m
i,j
。下标i指示相位步长。从(1)开始,(2)中的任务是最小化测量数据m上的代价f2以特别地找到图像δ,以及任选地,(2)的右侧可以被理解为残项的和。在(2)中,项s
i,j
是附加的(非小角度)散射估计,但是这是任选的,并且项s
ijiij
可以从(2)中去除。
[0074]
上述类型的图像生成算法(1)、(2)有时被称为“相位恢复”,但是出于当前目的,这是误称,因为还存在在拟合操作中共同生成的暗场图像,并且事实上还有如上所述的透射图像。其他基于傅里叶的方法(诸如(上面引用的)pfeiffer等人的方法和相关方法)在本文中也被设想为实施例中的相位恢复算法。
[0075]
用于特别地计算暗场图像的等式(1)、(2)中的相位恢复操作遭受统计偏差。更详细地,如(1)、(2)中所表达的操作可以被理解为对在相位步进期间所采集的测量数据起作用的统计估计器。测量结果本身由叠加有噪声的真实信号组成。因此,测量结果构成随机变量的实现,基于该随机变量,估计操作(1)、(2)旨在产生真实暗场信号的估计。
[0076]
根据(2)的一些相位恢复算法或相关算法广泛地属于最小二乘法的类别。如果噪声是高斯噪声,则最小二乘法继而与最大似然方法(统计估计原理)相关。由于计算暗场信号中涉及的非线性处理,估计器(2)遭受统计偏差。换句话说,在暗场信号估计中,招致系统误差。更详细地,估计器(2)的期望值通常不等于真实暗场信号。
[0077]
所提出的偏差校正系统br旨在减小或完全消除基于最大似然的估计器(诸如(2))
或相关估计器中的暗场信号的偏差δ。如上所述,虽然可以使用先前的低通滤波或基于像素的处理来减小偏差,但是该低通滤波方法遭受降低的空间分辨率。利用所提出的偏差校正方法和系统br,可以在减小或去除统计偏差的情况下基本上保留空间分辨率。
[0078]
广义地,如本文提出的偏差校正系统br基于双通道输入,其中两种类型的暗场图像由基于最大似然性的相位恢复算法的不同版本生成并且然后被处理。暗场图像的两个版本中的一个(在本文中被称为更高分辨率暗场图像δ)如上面解释的那样由诸如(1)、(2)的基于最大似然性的相位恢复算法生成。另外,暗场图像的第二版本δ’(在本文中被称为更低分辨率暗场图像)通过使用公式(1)或(2)处的相位恢复算法的修改来生成。更详细地,该修改的相位恢复算法是(1)、(2)的窗口处理的版本。换句话说,对于要为其生成暗场信号的一些或每个图像位置,相位恢复算法组合来自一个或多个其他图像位置的测量。
[0079]
这些其他的一个或多个图像位置可以形成所考虑的(目标)图像位置的窗口(邻域)。可以设想这种邻域的任何尺寸或形状,诸如正方形、圆形等。例如,邻域可以包括每个图像位置的直接八个邻域中的一个或多个。也设想了更大或更小的邻域。
[0080]
从概念上讲,给定图像位置周围的邻域(在本文也被称为“窗口”)确定了要应用相位恢复算法的方式,特别地要包括什么测量数据用于计算所述给定图像位置的暗场信号。换句话说,第二低分辨率暗场图像δ’是从滑动窗口相位恢复算法导出的。窗口在图像位置上被扫描或“滑动”,从而组合分别来自不同相邻图像位置的测量。
[0081]
更详细地,用于针对更低分辨率图像δ’在给定目标位置j处计算的窗口处理相位检索可以被公共式化为:
[0082][0083]
其中,与仅使用针对所述目标图像位置j收集的测量m
i,j
的(1)不同,针对目标图像位置j周围的邻域(“窗口”)中的测量结果i,评估并处理优化“argmin”(相位恢复)。
[0084]
更具体地,并且对应于(2)中的相位恢复算法,滑动窗口版本可以写为:
[0085][0086]
再次,与(2)不同,在拟合代价函数f中,针对来自目标像素j的邻域的其他像素的一些或所有测量被共同处理。注意,在该窗口处理方法中,针对相邻像素j
′
取参考值i
ij
′
,、v
ij
′
、s
ij
′
(如果有的话)和再次,附加的(非小角度)散射s
ij
′
估计项是任选的,并且项s
ijiij
可以在(4)中省略。如上面在(2)中,在实施例中,w
i,j
=1/m
i,j’。如在(2)中,权重w是任选的。
[0087]
窗口处理相位恢复操作(3)(4)减少或消除了偏差,因为更多数据的包括实际上减少了输入噪声,类似于输入数据的低通滤波。此外,在窗口处理相位恢复操作(3)(4)中,没有观察到由于跨条纹的平滑而导致的snr损失(或观察到由于跨条纹的平滑而导致的仅可忽略的snr损失)。否则当在投影域中(特别是在x射线狭缝扫描系统中)进行低通滤波时,这种snr损失可能是这种情况。
[0088]
应当理解,所提出的窗口处理的相位恢复算法不一定束缚于在(2)、(4)中使用的特定信号模型sm。本文还设想了导致具有固有偏差的估计器的基于任何其他合适的信号模型的相位恢复算法。这特别地包括相位恢复算法,其中,||.||基于最小二乘原理、或更一般地最大似然原理、或与其相关的统计原理。
[0089]
与高分辨率图像δ(其中针对给定目标图像位置的相应暗场值的计算限于仅针对该目标图像位置收集的测量结果)相比,窗口处理的相位恢复操作(3)、(4)降低了分辨率。然而,这种分辨率的损失不是遗漏图像信息的结果,而是组合来自目标图像位置周围的不同图像位置的测量的平滑操作(3)、(4)的结果。
[0090]
空间分辨率的损失会是不期望的,特别是在狭缝扫描dax成像系统或其他系统中,其中因为探测器dt以分箱模式读出以节省时间,所以已经引起分辨率的损失。为了恢复分辨率,本文提出了基于低分辨率图像δ’和高分辨率图像δ执行空间频率混合或合成。通过组合来自两幅图像δ、δ’的频率信息来形成增强图像增强图像在没有(或仅具有可忽略的)空间分辨率劣化的情况下被偏差减小。
[0091]
具体地,执行空间频率混合以从在滑动窗口相位检索(3)、(4)中获得的无偏差或至少偏差减小的低分辨率图像δ’中分离并提取低频信息,而从在没有平滑的常规相位检索(1)、(2)中获得的偏差损坏的高分辨率图像δ中分离并提取高频信息。使用这种频率分析背后的基本推理是偏差通常发生在更大的长度尺度上,例如在表示被成像患者ob的腹部、心脏或肩部的结构中。换句话说,偏差在更低频率结构中更明显,因此然后从偏差减小的图像δ’中获取该信息。然后可以组合两个频率内容以获得偏差减小的增强图像。
[0092]
对于空间频率混合,可以使用任何空间频率分析算法或滤波技术来将图像δ、δ’分析为其空间频率分量,诸如基于傅里叶的,特别是快速傅里叶方法(fft)、小波技术等。
[0093]
更详细地,对两个图像δ、δ’执行空间频率分析,以识别空间暗场内容。可以使用截止频率来定义δ’中的低频范围和更高分辨率图像δ中的高频范围。这些范围优选地是不交叠的,使得更低范围中的每个频率低于更高范围中的每个频率。然而,在实施例中,可以允许一定的交叠。
[0094]
通常,谱分析方法将低分辨率图像δ和高分辨率图像δ’变换到频率域中,在频率域中执行高频范围和低频范围的定义,然后将组合从相应图像δ、δ’采集的两个频率范围(高频率范围和低频率范围),并且然后将频率内容逆变换回到图像域中,以便得到增强图像替代地,将高频分量和低频分量变换回到空间域中,以获得高频图像和低频图像,并且然后通过简单相加来组合这些图像以获得增强图像。
[0095]
在实施例中,与schechter等人所讨论的频率分裂方法(“the frequency split method for helical cone-beam reconstruction”(med.phys.31(8),2004年8月))类似的频率分裂方法被用于上述空间频率分析。
[0096]
在上述方法的更一般变型中,高分辨率图像δ和低分辨率图像δ’两者通过相位恢复算法的窗口处理应用来获得。然而,其中,针对相应图像位置收集测量的窗口的尺寸不同。即,在获得低分辨率图像的相位恢复中使用比在获得(更)高分辨率图像的相位恢复中更大的窗口。
[0097]
现在更详细地参考图2,图2示出了所提出的包括偏差校正设施br的图像处理系统的框图。在相位步进测量中收集的投影测量数据λ在输入端口in处被接收。作为偏差减小设施br的一部分,图像生成器igen例如根据(2)、(4)和(1)、(3)实施两个相位恢复算法,以计算上述低分辨率图像δ和高分辨率图像δ’。在第二处理阶段,不同分辨率处的两个暗场图像δ、δ’然后在任选的频率提取器部件fe处通过一个或多个输入端口in’来接收。频率提取器fe部件识别低分辨率图像δ’中的低空间频率内容,并且识别更高分辨率图像δ中的
高空间频率内容。
[0098]
这样识别的频率分量然后在组合器σ信号处被组合以获得经偏差校正的增强图像通过信号组合器σ的计算组合操作可以包括傅里叶变换。特别地,频率提取器fe可以将输入图像δ、δ’变换到频率域,其中识别频率范围(高和低)。然后,逆傅里叶操作将所识别的频率范围从频率域逆变换到图像域,并且然后例如通过逐像素相加来组合逆变换的图像,以得到增强图像也设想了诸如通过加权求和、减法或除法或任何其他合适代数运算的其他组合。
[0099]
低分辨率图像可以由频率提取器fe的低通滤波器部件进行低通滤波,并且第二图像可以由频率提取器fe的高通部件进行高通滤波,并且两个滤波图像然后由组合器σ组合,例如通过加法或通过其他代数组合。
[0100]
替代地,不需要特定的高通滤波部件。频率提取器fe对低分辨率图像δ’进行“准”低通滤波(例如,通过使用窗口处理的移动平均操作),并且通过从δ中减去δ的低通滤波版本(其中使用与δ’相同的低通滤波器)来创建δ的补充高通滤波版本。
[0101]
可视化器viz操作为实现增强暗场图像在显示设备mt上的显示。替代地或除了显示之外,增强图像可以被存储在数据库db中以供稍后处理,或可以以其他方式处理。
[0102]
任选地,图2中的系统仍然可以包括低通滤波器lpf,以在由图像生成器igen处理之前对投影数据进行低通滤波,从而产生低分辨率图像和高分辨率图像。具体地,可以替代地或除了通过(4)的窗口处理图像生成之外使用低通滤波或平滑滤波器。更具体地,可以使用标准的非窗口处理图像生成算法(2),但是基于经滤波的投影数据来获得低分辨率的第一图像。高分辨率图像然后通过对非滤波投影数据使用(1)来获得。然而,低通滤波器级lpf优选地不在狭缝扫描成像系统中使用,但是可以在其他类型的成像系统中使用。换句话说,在非狭缝扫描系统中、或在没有分箱读出模式或没有分辨率折衷操作的其他系统中,可以在投影域中执行低通滤波,而在狭缝扫描系统中、或具有分箱读出或具有其他分辨率折衷操作的系统,可以通过使用上述滑动窗口相位恢复(3)、(4)来在图像域中实现准低通滤波。
[0103]
虽然在大多数情况下图像处理系统ips将包括图像生成器iegn和偏差校正设施br两者,但是这不是在所有实施例中都是必需的。根据(1)、(2)并且以窗口处理方式(3)、(4)的图像生成可以由一个或多个其他外部处理实体完成,并且然后将图像δ、δ’供应给偏差校正器。此外,每位置版本(1)、(2)和窗口处理版本(3)、(4)中的相位恢复算法可以由同一图像生成器执行,或由两个单独的处理实体执行,一个被配置为实现(1)、(2),另一个被配置为实现(3)、(4)。后一选项允许同时而不是顺序地执行相位恢复(1)、(2)和(3)、(4)的两个版本。
[0104]
现在参考图3,图3示出了用于减小暗场成像中的偏差的图像处理方法的流程图。该方法图示了可以如何实施上述偏差校正系统br。然而,应当理解,下面描述的方法步骤本身构成教导,并且不一定绑定到图1、2中所示的特定架构。
[0105]
在步骤s310处,接收由被配置用于暗场成像的成像装置收集的投影图像λ形式的测量结果mj。投影数据mj可以在相位步进操作中被采集,因此对于要生成的每个图像位置包括如上所述的一系列强度测量。
[0106]
任选地,该方法可以包括低通滤波步骤s320,以对投影数据进行低通滤波。该步骤优选地不在如图1所示的狭缝扫描系统或相关系统中使用,但是可以在不使用狭缝扫描或
不使用分箱探测器读出或其他分辨率折衷操作的其他dax成像装置中使用。
[0107]
在步骤s330处,基于相位恢复算法来计算处于第一分辨率的暗场图像的第一版本δ’。
[0108]
在步骤s340,以高于在步骤s330处生成的第一版本的分辨率的第二分辨率生成暗场图像的另一版本δ。步骤s330、s240的顺序是无关紧要的。
[0109]
可以通过如上面解释的那样使用不同尺寸的窗口应用窗口处理图像生成算法(诸如相位恢复算法)来实现步骤s330和s340中的不同分辨率。可以在没有窗口处理的情况下计算高分辨率图像,而在具有窗口处理的情况下计算低分辨率图像。特别地,并且在一个实施例中,低分辨率s330通过平滑操作来实现,其中,当计算针对所述目标位置j的dax信号/值时,来自(一个或多个)其他图像位置j’的测量结果m
j’与针对给定目标位置j的测量结果mj组合或共同处理。与步骤s330不同,步骤s340中的高分辨率图像通过在给定目标图像位置j处仅基于针对给定目标位置j收集的测量结果mj计算暗场值来生成。
[0110]
作为使用步骤s330的窗口处理图像生成算法的替代方案,使用在步骤s320提供的低通滤波投影数据来计算低分辨率图像。在该实施例中,不需要窗口处理图像生成。可以使用基于未滤波的原始投影数据的非窗口处理图像生成来计算高分辨率图像。
[0111]
在下一步骤s345处,接收低分辨率图像δ’和高分辨率图像δ。
[0112]
在步骤s350中,在低分辨率图像δ’中识别低空间频率信息,并且在高分辨率图像δ中识别高空间频率信息。这可以通过任何频谱频率分析算法(诸如基于傅里叶的方法等)来完成。
[0113]
在步骤s360中,然后组合来自从两个图像δ、δ’收集的两个频率范围的低频图像信息和高频图像信息。
[0114]
步骤s360处的组合操作可以包括傅里叶逆变换,以从进行步骤s360的空间频率分析的频率域变换回到图像域。组合操作可以包括将在傅里叶逆变换或诸如频率分裂方法的其他频率分析中获得的两个图像相加。可以通过像素地计算组合来执行组合操作,例如通过将来自逆变换的高分辨率图像和低分辨率图像的相应且对应的像素值相加以计算增强图像的相应像素值。
[0115]
在步骤s370处,然后输出在合成器或组合步骤s360处获得的增强图像。
[0116]
在步骤s380处,然后显示、存储或以其他方式处理增强图像。
[0117]
偏差减小器br设施的部件可以被实施为在一个或多个通用处理单元pu(诸如与成像器ia相关联的工作站)上或在与一组成像器相关联的服务器计算机上运行的一个或多个软件模块。
[0118]
替代地,偏差减小器br的一些或所有部件可以被布置在被集成到成像系统ia中的硬件中,诸如适当编程的微控制器或微处理器,诸如fpga(现场可编程门阵列)或硬连线ic芯片、专用集成电路(asic)。在又一实施例中,偏差减小器br可以部分地以软件和部分地以硬件两者来实施。
[0119]
可在单个数据处理单元pu上实现偏差减小器br的不同部件。替代地,一些或更多个部件在不同的处理单元pu上实施,可能远程布置在分布式架构中并且可连接在合适的通信网络中(诸如在云设置或客户端-服务器设置等中)。
[0120]
应当理解,虽然在多通道相位恢复算法(2)、(4)的背景下描述了dax图像生成步骤
s330、340或图像生成器igen,但这在本文中不是必需的。可以使用可能不一定需要用于相位对比度和/或衰减贡献的通道的其他图像生成算法。可以替代地使用双通道或单通道模型。
[0121]
还应注意,在一些上述实施例中使用的干涉测量或更一般地基于图像促进器ifs的成像硬件可以被认为仅仅是记录根据其计算dax图像的投影数据的一个选项。为此目的,还可以考虑其他成像设置。
[0122]
本文描述的一个或多个特征可以被配置或实施为或具有在计算机可读介质内编码的电路和/或其组合。电路可以包括分立和/或集成的电路、片上系统(soc)及其组合、机器、计算机系统、处理器和存储器、计算机程序。
[0123]
在本发明的另一示例性实施例中,提供了一种计算机程序或计算机程序单元,其特征在于,其适于在适当的系统上运行根据前述实施例之一所述的方法的方法步骤。
[0124]
因此,计算机程序单元可以被存储在计算机单元中,该计算机程序单元也可以是本发明的实施例的部分。该计算单元可以适于执行或引起对上述方法的步骤的执行。此外,该计算单元可以适于操作上述装置的部件。该计算单元能够适于自动操作和/或运行用户的命令。计算机程序可以被加载到数据处理器的工作存储器中。因此,可以装备数据处理器来执行本发明的方法。
[0125]
本发明的该示例性实施例覆盖从一开始就使用本发明的计算机程序以及借助于将现有程序更新转换为使用本发明的程序的计算机程序二者。
[0126]
另外,计算机程序单元可以能够提供所有必要步骤以完成如上所述的方法的示例性实施例的流程。
[0127]
根据本发明的另外的示例性实施例,提出了一种计算机可读介质,例如,cd-rom,其中,该计算机可读介质具有被存储于所述计算机可读介质上的计算机程序单元,所述计算机程序单元由前面的章节所描述。
[0128]
计算机程序可以被存储和/或分布在合适的介质(特别是但不必一定是非瞬态介质)上,例如,与其他硬件一起或作为其他硬件的部分供应的光学存储介质或固态介质,但是也可以以其他形式分布,例如,经由互联网或其他有线或无线的电信系统分布。
[0129]
然而,计算机程序也可以存在于网络(如万维网)上,并且能够从这样的网络被下载到数据处理器的工作存储器中。根据本发明的另外的示例性实施例,提供了用于使计算机程序单元可用于下载的介质,所述计算机程序单元被布置为执行根据本发明的先前描述的实施例中的一个实施例的方法。
[0130]
应注意,本发明的实施例是参考不同主题来描述的。尤其地,一些实施例是参考方法型权利要求来描述的,而其他实施例是参考设备或系统型权利要求来描述的。然而,除非另有说明,本领域技术人员将从以上描述中推断出,除了属于一种类型的主题的特征的任意组合之外,涉及不同主题的特征之间的任意组合也被认为在本技术中得到公开。然而,所有的特征都能够被组合来提供多于特征的简单加合的协同效果。
[0131]
虽然已经在附图和前面的描述中详细图示和描述了本发明,但是这样的图示和描述应当被认为是图示性或示例性的,而非限制性的。本发明不限于所公开的实施例。本领域技术人员通过研究附图、公开内容以及权利要求,在实践请求保护的发明时能够理解并实现对所公开的实施例的其他变型。
[0132]
在权利要求中,“包括”一词不排除其他元件或步骤,并且词语“一”或“一个”不排除多个。单个处理器或其他单元可以实现在权利要求中记载的若干项的功能。虽然特定措施是在互不相同的从属权利要求中记载的,但是这并不指示不能有利地使用这些措施的组合。权利要求中的任何附图标记都不应被解释为对范围的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1