用于俘获离子量子计算机中的条件逻辑的离散频率调制门
用于俘获离子量子计算机中的条件逻辑的离散频率调制门
1.关于联邦资助研究的声明
2.本公开是由政府支持在国家科学基金会授予的第phy-181891号联邦资助下进行的。联邦政府对本公开拥有特定权利。
3.相关申请案的交叉引用
4.本技术案主张2020年3月26日申请的标题为“用于俘获离子量子计算机中的条件逻辑的离散频率调制门(discrete frequency modulated gates for conditional logic in trapped ion quantum computers)”(代理人案号:du7032prov)的第62/994,998号美国临时申请案的权益,所述申请案以引用的方式并入本文中。如果本技术案与以引用的方式并入的案中的一或多者之间在语言上存在可能会影响本案中权利要求的解释的任何矛盾或不一致,那么本案中的权利要求应被解释为与本案中的语言一致。
技术领域
5.本公开涉及量子计算机中的离散频率调制门。更特定来说,本公开涉及在给定测量径向运动模式频率及期望的门时间的情况下产生离散频率调制脉冲序列。
背景技术:
6.由于相干时间长、高保真度初始化、检测及量子位门操作,俘获原子离子是实现量子计算机的主要量子位平台。莫尔默-索伦森(molmer-sorensen)(ms)门是双量子位门,在使用轴向模式的双离子系统中,其证实的保真度超过99.9%。
7.在双离子链或四离子链中,离子的个别光学寻址及调制脉冲技术对ms门至关重要。多通道声光调制已用于原子量子位的个别寻址。另外,使用声光/电光调制及微机电系统(mems)倾斜镜的转向束也被用于个别寻址原子量子位。
8.关于mems个别地寻址量子位系统,可忽略的串扰已被证实。另外,还开发对寻址束之间的光学相位漂移不敏感的门方案。此外,还可能发生导致运动模式的自旋及运动的纠缠的相位漂移。相位漂移也可能导致门的旋转角度的偏差。
9.已使用的其它方法包含调幅(am)门、调频(fm)门及多音ms门。另外,此类am、fm及ms门中已证实保真度。使用五个或更多个离子的离子链,已证实保真度通常为约97%到98.5%。因而,这些调制脉冲试图提高门对任何发生的频率漂移的稳健性。
10.针对较大量子位阵列中的任何类型的高保真度量子逻辑门操作,必须考虑差的光学相干性。个别寻址束之间的差的光学相干性可能会对门保真度产生一定影响。影响门保真度的另一因素是从寻址束到相邻量子位的串扰。两个因素都可能对门保真度产生一定的影响,且上文所描述的方法必须处理差的相位相干性以及寻址束与相邻量子位之间的串扰。
11.关于串扰,系统已证实寻址束与相邻量子位之间的可忽略的串扰。例如,已开发对寻址束之间的光学相位漂移不敏感的mems寻址系统及门方案。各种调制脉冲技术可从所有集体运动模式解缠任何内部量子位状态。由于内部量子位状态从所有集体运动模式解缠,
因此尽管发生任何频率漂移,但仍可提高稳健性。此类漂移可随运动模式频率发生。
12.因此,已开发用于寻址两个或更多个离子的链中ms门的离子的个别光学寻址的方法。此类方法包含mems寻址系统。进一步来说,使用pm门、am门及fm门的方法已用于尝试从所有集体运动模式解缠内部量子位状态,其中频率漂移可导致非所要的纠缠。此类方法已用于五个或更多离子的离子链。
13.然而,需要证实在双离子链及四离子链中证实高保真度的双量子位门。应解决一种系统,其中有效解决导致纠缠及幅度误差的运动模式频率的漂移。
14.在大型俘获原子离子量子计算机中,高保真度双量子位门需要通过个别控制扩展到所有量子位。在使用径向模式的双离子链及四离子链的系统中,需要表征及实现高保真度双量子位门。需要推导双离子链及四离子链中的门保真度。需要测量适合的量子位门序列。需要开发方法,以进一步改进门对与容错量子计算兼容的值的保真度。
15.因此,需要产生不受运动模式频率漂移导致的非所要的自旋运动及纠缠的影响的脉冲序列。进一步来说,需要更精确地校正由相位偏差或幅度误差引起的幅度误差。因而,应该有一种方法来产生脉冲序列,同时解决导致径向运动模式的自旋及运动的非所要纠缠的运动模式频率中的漂移以及导致幅度误差的门的旋转角度的偏差。
技术实现要素:
16.本公开的实施例采用用于在给定测量模式径向频率及所期望的门时间情况下产生对称段的离散频率调制脉冲序列的过程。
17.针对高保真度量子逻辑门操作,个别寻址束之间的光学相位相干损失以及从寻址束到相邻量子位的串扰可能会影响门保真度。已开发对寻址束之间的光学相位漂移不敏感的门方案,以克服不同束之间光学束路径的波动。
18.调制脉冲技术用于将内部量子位门从集体运动模式解缠,并还提高对频率漂移的稳健性。离散频率调制脉冲序列可通过关闭所有径向运动模式的相位空间轨迹而生成,并解缠径向运动模式的自旋及运动。由于门的旋转角度的偏差所致的幅度误差可通过有意的偏移失谐来校正,而不是调谐激光强度。
19.本公开的说明性实施例是一种系统,其包括经配置以将连续波形重构为离散模拟版本的控制器。所述系统还包含数值优化器,其经配置以确定所述离散模拟版本的脉冲序列的频率,其中所述数值优化器使用径向运动模式频率及所期望的门时间。所述数值优化器通过所述关闭径向运动模式的相位空间轨迹生成所述脉冲序列,解缠自旋及运动,并限制运动边带跃迁的拉比(rabi)频率。所述系统还包含显示器,其经配置以基于所述所确定的频率说明离散频率调制脉冲序列。所述离散频率调制脉冲序列经设计为相等时间段的序列,其中所述相等时间段中的每一者具有恒定频率。
20.在一些实施例中,所述所期望的门时间小于或等于200微秒。
21.在一些实施例中,所述数值优化器经配置以校正导致自旋运动纠缠及与几何相位的偏差的径向运动模式的漂移。
22.在一些实施例中,所述数值优化器经配置以校正导致幅度误差的任何相位偏差。
23.在一些实施例中,现场可编程门阵列经配置以实时触发直接数字合成器(dds)通道的频率更新。
24.本公开的实施例是一种系统,控制器经配置以获得预定的门时间及测量的模式频率。所述系统还包含数值优化器,其经配置以接收所述预定的日期时间及测量的模式频率,以确定脉冲序列的频率。所述数值优化器消除包含导致自旋运动纠缠及几何相位的偏差的运动模式频率漂移的相位空间轨迹,且其中所述数值优化器限制运动边带跃迁的拉比频率。所述系统还包含显示装置,其经配置以基于所述预定的门时间、测量的模式频率以及通过消除所述自旋运动纠缠及与所述几何相位的偏差确定的所述频率来说明所述脉冲序列。
25.在一些实施例中,所述数值优化器计算所述脉冲序列的频率,以使所述脉冲序列能够具有相等时间段。
26.在一些实施例中,其中所述数值优化器关闭所有径向运动模式的所述相位空间轨迹。
27.在一些实施例中,所述数值优化器解缠至少四个运动模式的自旋及运动。
28.在一些实施例中,所述数值优化器消除所有幅度误差,以使所述脉冲序列能够以相等时间段产生。
29.本公开的另一实施例是一种方法,其包括通过控制器将连续波形重构为离散模拟版本。所述方法还包含通过数值优化器确定所述离散模拟版本的脉冲序列的频率,其中所述数值优化器使用径向运动模式频率及所期望的门时间。所述数值优化器通过关闭所述径向运动模式的相位空间轨迹来生成所述脉冲序列,其中所述数值优化器解缠自旋及运动,并限制运动边带跃迁的拉比频率。所述方法还包含通过显示器基于所述所确定频率说明离散频率调制脉冲序列,其中所述离散频率调制脉冲序列经设计为相等时间段的序列,其中所述相等时间段中的每一者具有恒定频率。
30.在一些实施例中,估计多个串联莫尔默-索伦森门的总门误差。
31.在一些实施例中,估计连续门的最终状态保真度,其中所述估计考虑残余自旋运动纠缠。
32.在一些实施例中,估计具有运动边带跃迁的拉比频率的偏差的连续门的最终状态保真度。
33.在一些实施例中,一或多组微机电系统(mems)镜经配置以递送由直接数字合成器(dds)修改的束。
附图说明
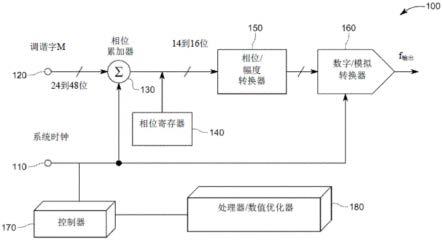
34.图1描绘根据本公开的说明性实施例的直接数字合成器的框图。
35.图2描绘根据本公开的说明性实施例的离散频率调制脉冲序列的显示。
36.图3(a)说明本公开的说明性实施例的运动模式的相位空间轨迹。
37.图3(b)展示本公开的说明性实施例的运动模式的另一相位空间轨迹。
38.图3(c)还描绘本公开的说明性实施例的运动模式的相位空间轨迹。
39.图3(d)描绘本公开的说明性实施例的运动模式的另一相位空间轨迹。
40.图4描绘说明本公开的说明性实施例中的给出不同失谐偏移的1、5、13及21个串联门的估计总门误差的图。
41.图5展示说明本公开的说明性实施例中的21个连续门的最终状态误差的图。
42.图6(a)说明本公开的说明性实施例中的双离子链中的门保真度。
43.图6(b)展示本公开的实施例中的四离子链中的门保真度。
44.图7(a)描绘本公开的实施例中的拉曼(raman)束光学设置的示意性表示。
45.图7(b)说明本公开的实施例中的拉曼束光学设置的另一示意性表示。
46.图7(c)展示本公开的实施例中的
171
yb
+
离子的能级示意图。
47.图8说明描述根据本公开的实施例的过程的流程图。
具体实施方式
48.以下公开内容可在任意波形产生器(awg)或直接数字合成器(dds)上执行。下面描述的图式(图)1并不旨在将本公开限制于特定设备(例如任意波形产生器或dds)。
49.图1描绘dds 100的框图。dds 100包含系统时钟110、调谐字120及相位累加器130。另外,dds 100包含相位寄存器140。dds 100还包含相位/幅度转换器150及数字/模拟d/a转换器160。进一步来说,dds 100包含控制器170及数值优化器180。控制器170可将连续波形重构为其与dds 100兼容的离散模拟版本。在其它实施例中,dds 100的其它组件也可将连续波形重构为其与dds 100兼容的离散模拟版本。另外,如下面将在后面的图(例如图2)中所描述的,数值优化器180执行一系列步骤以使得能够显示频率脉冲调制序列。数值优化器180可关闭所涉及的所有径向运动模式的相位空间轨迹。数值优化器180还可解缠径向运动模式的非所要的自旋及运动。径向运动模式的频率漂移可导致径向运动模式的非所要的自旋及运动。由运动模式频率的漂移引起的失谐误差导致调频(fm)门的旋转角度的相位偏差。fm门的相位偏差被认为是幅度误差。数值优化器可通过使用有意的失谐偏移而不是调谐激光强度来更精确地补偿幅度误差。
50.参考图2,说明频率脉冲调制序列(脉冲序列)200,其中连续波形被重构为离散模拟版本。此外,脉冲序列200经设计为相等时间段的序列。时间段中的每一者可具有恒定的频率。数值优化器180可通过执行一系列步骤以使用有意的失谐偏移消除fm门处的幅度误差,以使得脉冲序列200能够作为dds 100的输出产生。
51.在图2中,数值优化器180可确定脉冲序列200的频率。数值优化器并利用测量的径向运动模式频率及所期望的门时间。在本实施例中,所期望的门时间经展示为200微秒。在其它实施例中,所期望的门时间可为不同的。此外,门时间是指数值优化器180可预设以确定脉冲序列200的频率的预设周期。所期望的门时间可为小于或等于200微秒的任何时间。数值优化器180可关闭所有径向运动模式的相位空间轨迹。另外,数值优化器180可解缠径向运动模式的非所要的自旋及运动。
52.关于图2,失谐误差由运动模式频率的漂移引起。运动模式频率的漂移也导致非所要的自旋运动纠缠。由运动模式频率的漂移引起的失谐误差也可能导致莫尔默-索伦森(ms)演进的几何相位的偏差。如上文所提及,累加的相位偏差可指fm门的旋转角度的偏差。因而,fm门的旋转角度的偏差可被认为是幅度误差。校正幅度误差的一种方式是通过调谐激光强度。为了获得脉冲序列200,数值优化器180必须消除幅度误差。在其它实施例中,通过调谐激光强度而校正幅度误差。然而,在那些实施例中,通过调谐激光强度,如果失谐误差在时间尺度上比校准与实验电路之间的时间变化得更快,那么然后强度校准将不再准确,且激光强度的调谐将会不够。
53.在图2中,与调谐激光强度相反,可应用有意的失谐偏移来更精确地补偿小幅度误
差。残余自旋运动纠缠及fm门的旋转角度的偏差可与有意的失谐偏移一起使用。有意的失谐偏移可利用可忽略的残余自旋运动纠缠来抵抗fm门中的任何失谐误差。有意的失谐偏移比调谐激光强度更精确。在实施例中,校准可通过用二十一个串联门扫描失谐偏移来完成,其中串联指以链或系列或连续地紧密连结的门。校准可应用于状态|00>。因此,状态|00》及|11》具有相等概率下的失谐将指示ms门的完美旋转角度。在实施例中,且作为实例,将有意的失谐偏移应用于多达二十一个连续的ms门,其中幅度误差被校正。在其它实施例中,有意的失谐偏移可应用于多于或少于二十一个连续的ms门。代替调谐激光强度,有意的失谐偏移可消除由门的旋转角度的偏差引起的幅度误差。
54.在图2中,数值优化器180可校正由运动模式频率的漂移引起的失谐误差,所述漂移导致非所要的自旋运动纠缠及径向运动模式的几何相位的偏差。代替调谐激光强度,可使用有意的失谐偏移,其可更精确地补偿由于运动模式频率的漂移而发生的小幅度误差。
55.总而言之,图2展示数值优化器180可如何基于所确定的门时间及测量的径向运动模式频率来生成脉冲序列200。数值优化器可关闭径向运动模式的相位空间轨迹,并解缠由于运动模式频率的漂移而发生的径向运动模式的自旋及运动。数值优化器180还可消除ms演进的几何相位的偏差。相位偏差可被认为是fm门的旋转角度的偏差,或幅度误差。代替调谐激光强度,可使用有意的失谐偏移,以更精确地补偿幅度误差。
56.图3(a)到(d)说明四个径向运动模式310、320、330及340的相位空间轨迹。如图2中所描述,径向运动模式的自旋及运动需要纠缠以产生上述图2中所描述的脉冲序列200。数值优化器180生成脉冲序列200,其关闭径向运动模式310、320、330及340的相位空间轨迹。另外,数值优化器180解缠径向运动模式310、320、330及340的自旋及运动。幅度误差由有意的失谐偏移补偿。数值优化器180使用有意的失谐偏移来精确地补偿运动模式频率中的相位漂移或漂移,所述相位漂移或漂移导致非所要的自旋及运动以及几何相位的偏差。有意的失谐偏移补偿运动模式频率的相位漂移。结果,数值优化器180可关闭径向运动模式310、320、330及340的相位空间轨迹,且还解缠径向运动模式310、320、330及340的非所要的自旋及运动。因此,脉冲序列200可作为dds 100的输出产生。
57.在图3(a)到(d)中,运动模式频率中的漂移将导致径向运动模式310、320、330及340的非所要的自旋运动纠缠。径向运动模式310、320、330及340的运动模式频率中的漂移也导致ms演进的几何相位的偏差。此外,在fm门的
±
1khz失谐误差上,可忽略径向运动模式310、320、330及340的残余纠缠的误差。相位偏差或几何相位的偏差由fm门的旋转角度的偏差表示。fm门的旋转角度的偏差可被确定为幅度误差。fm门的幅度误差可通过使用有意的失谐偏移来精确地补偿幅度误差而校正。通过调谐激光强度,如果失谐误差在时间尺度上比校准与实验电路之间的时间变化得更快,那么强度校准将不再准确。因而,有意的失谐偏移代替调谐激光强度是优选的。
58.在图3(a)到(d)中,有意的失谐偏移可校正fm门的幅度误差。有意的失谐偏移可应用于连续的门。此外,失谐偏移可用多达二十一个串联门进行扫描。结果,对应的校准可极大地减小及/或消除由于运动模式频率中的漂移所致的旋转角度的偏差引起的幅度误差。另外,径向运动模式310、320、330及340的非所要的自旋运动纠缠也可被校正。结果,可产生恒定频率下具有相等时间段的脉冲序列200。
59.图4说明系统图400,其中在一个ms门、五个ms门、十三个ms门及二十一个ms门上应
用有意的失谐偏移。在其它实施例中,有意的失谐偏移可应用于多于或少于二十一个ms门。进一步来说,系统图400展示应用于图1中的dds 100以产生图2中所展示的脉冲序列200的有意的失谐偏移的说明。说明具有不同失谐偏移的一个、五个、十三个及二十一个串联门的估计总门误差。在一个、五个、十三个及二十一个连续ms门之后的最终状态保真度的估计被用作失谐偏移的函数。最终状态保真度的估计既适用于径向运动模式的残余自旋运动纠缠,也适用于fm门的旋转角度的偏差。可引入有意的失谐偏移以利用可忽略的自旋运动纠缠来防止fm门中的失谐误差。
±
100hz失谐偏移可补偿运动边带跃迁的拉比频率的大约
±
0.8%偏差。可使用有意的失谐偏移代替调谐激光强度的过程,其中有意的失谐偏移是获得最终状态保真度及校正fm门的任何幅度误差的更精确的方法。
60.参考图5,说明二十一个连续ms门的估计最终状态误差的系统图500,其具有运动边带跃迁的拉比频率的
±
0.8%偏差。在其它实施例中,可估计多于或少于二十一个连续ms门的估计最终状态误差。系统图500展示图1中所展示的dds 100内的二十一个ms门的最终状态误差,以使得能够产生图2中的脉冲序列200。由于不完美的激光强度而发生的幅度误差可通过有意的失谐偏移来补偿,而不是调谐激光强度。
±
100hz失谐偏移可补偿运动边带跃迁的拉比频率的约
±
0.8%偏差。
61.在图5中,运行校准以补偿模式频率及激光强度的小漂移。进一步来说,与调谐激光强度相反,可使用有意的失谐偏移更精确地补偿激光强度的小漂移。校准可通过扫描应用于|00》的二十一个连续/串联门的失谐偏移完成。此外,其中|00》及|11》具有相等概率的失谐指示ms门的完美旋转角度。因此,与粗略校准或调谐激光强度相反,本校准技术改进门保真度。
62.可在双离子链及四离子链中证实双量子位ms门。如下文将展示,可提取状态保真度,测量群体及同位对比度。此外,说明由于群体泄漏及同位对比度下降所致的失真。
63.图6(a)展示双离子链中的双量子位ms门。说明由于群体泄漏及同位对比度降低所致的失真的图600。在图6(a)中,菱形指示群体泄漏到|01》及|10》空间。正方形指示同位对比度的损失。另外,圆形指示最终状态的失真。最初,目标量子位初始化为|00》状态。应用一系列一个、五个、十三个及二十一个ms门以制造最大纠缠状态系列一个、五个、十三个及二十一个ms门以制造最大纠缠状态可通过测量群体及同位对比度来提取状态保真度。随机及相干误差可用串联的ms门以线性及二次方式累加。另外,状态准备及测量(spam)误差也保持恒定。然而,使用线性拟合/方式,可在没有spam误差的情况下提取门或状态保真度。因而,双离子链的双量子位门保真度为99.49%。因而,数据与线性拟合/方式匹配,且因此针对双量子位门,任何系统误差都可忽略。
64.参考图6(b),说明由于群体泄漏及四离子链中的同位对比度降低所致的失真的图610。如在图6(a)中,图中的菱形指示群体泄漏到|01》及|10》空间。另外,正方形指示同位对比度的损失,而圆形指示最终状态的失真。如在双链中,在四离子链中,目标退出被初始化为状态|00》状态。应用一个、五个、十三个及二十一个ms门序列以制造最大纠缠状态为了提取状态保真度(如图6(b)中的圆形所指示),需要测量群体及同位对比度。即使随机及相干误差可在门内线性及二次地累加,也必须测量群体及同位对比度。另外,spam误差可保持恒定。然而,使用如图6(a)中的线性拟合,可在没有spam误差
的情况下提取门保真度。针对四离子链,双量子位门保真度为99.30%。由于四离子链的数据与线性拟合匹配,任何相干系统误差与双离子链一样都可忽略不计。进一步来说,因此可在没有spam误差的情况下提取门保真度。由于数据与线性拟合匹配,因此双量子位门的任何系统误差也可忽略。
65.关于图6(a)到(b),激光移相、运动移相、拉曼豆强度波动及非共振耦合的四离子及双离子链的模拟误差值是相同的。另外,运动加热、自发发射及fm解决方案缺陷的模拟误差值也是相同的。
66.通过用于俘获离子系统的优化自动校准流水线,可证实微机电系统(mems)中的高保真度双量子位门。量子位可在
171
yb
+
离子中以2s
1/2
流形的超精细能级中的超精细能级编码为|0>≡|f=0;mf=0》及|1》≡|f=1;mf=0>,其中量子位频率分裂为12.642821ghz,如图7(c)中所展示。在其它实施例中,类似的方法可与其它原子种类及同位素一起使用。
67.在图7(a)中,说明基于mems的量子位寻址系统700。第一平行束(束)705入射在聚焦透镜710上。第一平行束705是一对紧密聚焦的个别寻址束,其可使用mems装置跨量子位链独立地操纵。束705穿过聚焦透镜710并入射到第一透镜715上。束705由此穿过第一透镜715并入射到mems装置内的第一mems镜720上。第一mems镜720是mems装置的部分,mems装置还包含第二mems镜730。在束705从第一mems镜720反射之后,束705入射到凹面镜725上。束705从凹面镜725反射并反射到mems装置内的第二mems镜730上。然后,束705从第二mems镜730行进到第二透镜735上。束705从第二透镜735反射到傅里叶(fourier)透镜740上。束705穿过傅里叶平面行进到投影及束组合光学器件745上。然后束705可入射在二向色镜750上。
68.在图7(a)中,光纤阵列760可将另一束775提供到另一透镜或检测光学器件755上。束775也可作为束705入射在二向色镜750上。束705、775从二向色镜750入射在高na成像透镜765上。束705、775穿过高na成像透镜765到量子位770上。因此,光纤阵列760与mems镜720、730的组合导致相邻量子位770上的干净高斯束及低强度串扰。
69.在图7(b)中,还说明拉曼束光学器件设置的示意图。说明阱表面780。阱轴向轴相对于mems镜720、730的两个倾斜轴旋转四十五度,以利用正交倾斜镜来最大化可寻址量子位。投影及束组合光学器件745可由黑框表示。
70.图7(c)说明
171
yb
+
离子的能级示意图785。红线及蓝线指示量子位操作的双光子拉曼跃迁。
71.总的来说,光学设置可在相邻量子位770上产生一对干净的高斯束及低强度串扰。强度串扰可导致门串扰,或目标量子位与相邻量子位之间的拉比频率的比率。
72.图8说明其中可产生脉冲调制序列的过程800。数值优化器180可使用测量的径向模式频率及高达200微秒的所期望的门时间来实现脉冲序列200。所期望的门时间可小于或等于200微秒。数值优化器180可解缠由运动模式频率中的漂移引起的图3(a)到(d)中所展示的径向运动模式的非所要的自旋及运动。另外,数值优化器180还关闭由运动模式频率中的漂移引起的径向运动模式的相位空间轨迹。累加的相位偏差或门的旋转角度的偏差可被认为是幅度误差。然而,有意的失谐偏移可补偿幅度误差。
73.在图8中,在步骤810处,dds 100内的控制器180可将连续波形重构为其离散模拟版本。在其它实施例中,dds 100的其它组件可将连续波形重构为其离散模拟版本。
74.在图8中,在步骤820处,数值优化器180经配置以使用径向运动模式频率及所期望
的门时间确定脉冲序列200的频率。所期望的门时间可小于或等于200微秒。
75.在图8中,在步骤830处,数值优化器180通过关闭相位空间轨迹并解缠径向运动模式的非所要的自旋及运动来生成脉冲序列200。运动模式频率的漂移导致运动模式的非所要的自旋运动纠缠及相位偏差。数值优化器180可解缠运动模式的非所要的自旋及运动。另外,累加的相位偏差由fm门的旋转角度的偏差表示。fm门的旋转角度的偏差可被确定为幅度误差。有意的失谐偏移可用于精确地补偿幅度误差或fm门旋转角度的偏差。
76.在图8中,在步骤840处,数值优化器通过限制运动边带跃迁的拉比频率来生成脉冲序列200。数值优化器180将运动边带跃迁的拉比频率限制为小于7khz。此外,在实施例中,分别地,针对双离子链中的fm门,所需的边带拉比频率为5.55khz,且针对四离子链中的fm门为5.47khz。
77.参考图8,在步骤850处,显示离散频率调制脉冲序列/脉冲序列200。脉冲序列200经设计为相等时间段的序列,其中时间段中的每一者具有恒定的频率。已消除非所要的自旋及纠缠以及相位偏差。脉冲序列可具有小于或等于200微秒的总门时间,且还由二十个对称段组成。
78.总而言之,数值优化器180可通过解缠由运动模式频率的漂移引起的径向运动模式的非所要的自旋及运动来产生脉冲序列200。另外,通过使用有意的失谐偏移可精确地补偿由运动模式频率的漂移引起的fm门的旋转角度的累加的相位偏差。有意的失谐偏移可精确地补偿由于fm门的旋转角度的偏差所致的小幅度误差。在实施例中,
±
100hz失谐偏移可补偿运动边带跃迁的拉比频率的约
±
0.8%偏差。
79.应理解,本公开仅教示根据本公开的实施例的一些实例,且所属领域的技术人员在阅读本公开后可容易地设计本公开的许多变体,且本公开的范围将由随附权利要求书确定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1