信息处理装置以及信息处理方法与流程
1.本发明涉及信息处理装置以及信息处理方法。
背景技术:
2.近年,在工厂自动化(factory automation(fa))市场中,正在利用使用由图像传感器而检测到的人体信息,通过分析工场内作业者的作业时间或解析动线而实现工场内的最优化以及安全性提高的应用(application)。在人体检测中能够利用深度学习技术,但由于检测很花时间,因此实时的解析有可能很困难。专利文献1公开了通过将在构成动图的帧间产生变化的运动物体区域作为检测对象区域,从而减轻从动图检测对象物时的处理负荷的技术。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2018-128885号公报
技术实现要素:
6.发明要解决的课题
7.即使将检测对象区域限定为运动物体区域,人体以外的运动物体例如在工场中输送机上的纸箱等人体以外的运动物体也可能会被包含于解析对象中,因此人体检测的处理负荷并未被充分地减轻。此外,在使用物体的形状信息进行检测的情况下,形状会根据姿势而变化的人体有可能未精度较好地被检测到。
8.本发明在一个方面,目的为提供实时地精度较好地检测人体的技术。
9.用于解决课题的手段
10.本发明为了达成上述目的而采用以下的结构。
11.本公开的第一方面,为信息处理装置,具备:运动物体探测部,从由鱼眼摄像机拍摄的拍摄图像中探测运动物体;人体判定部,通过将包含所述运动物体的运动物体区域的轮廓上的规定的2点间的距离与基于在所述拍摄图像内的所述运动物体的位置测量到的人体的身高而被设定的阈值的范围进行比较,来判定所述运动物体是否为人体;以及人体检测部,从包含由所述人体判定部判定为人体的所述运动物体的所述运动物体区域中检测人体。
[0012]“包含运动物体的运动物体区域的轮廓上的规定的2点间的距离”在运动物体为人体的情况下为相当于人体的身高的距离。以下,也称运动物体的长度。“阈值的范围”在拍摄人体的情况下,能够设为在拍摄图像内的位置中人体的身高可取的值的范围。信息处理装置限定通过运动物体探测而检测人体的对象区域,进一步的,限定在运动物体为人体的情况下检测人体。因此,基于人体检测的处理的负荷被减轻,信息处理装置能够实时地精度较好地检测人体。
[0013]
包含运动物体的运动物体区域的轮廓上的规定的2点间的距离也可以是第1坐标
和与第1坐标不同的第2坐标之间的距离,该第1坐标是在运动物体区域内离拍摄图像的中心坐标最近的点或最远的点,该第2坐标是穿过中心坐标以及第1坐标的直线与运动物体区域的轮廓之间的交点。信息处理装置能够通过简单的方法而计算运动物体的长度。
[0014]
包含运动物体的运动物体区域的轮廓上的规定的2点间的距离也可以是通过运动物体区域的重心坐标与拍摄图像的中心坐标的直线与运动物体区域的轮廓相交的2点间的距离。即使作为人体的运动物体区域的形状根据人伸手等姿势的改变而变化,由于人的手比躯体更细,因此运动物体区域的重心存在于人的躯体上。因此,信息处理装置通过计算通过重心坐标和拍摄图像的中心坐标的直线与运动物体区域的轮廓相交的2点间的距离,能够精度较好地取得人体的身高。
[0015]
阈值的范围也可以按将拍摄图像分割为多个区域的每一个而被设定。由于人的映现方式根据拍摄图像内的位置而不同,因此信息处理装置将按分割的区域的每一个而被设想的人体的长度设定为阈值的范围。由此,信息处理装置能够精度较好地判定被探测到的运动物体是否为人体。
[0016]
运动物体探测部也可以根据背景差分法、或帧间差分法而探测运动物体。此外,运动物体探测部也可以基于在拍摄图像的连续帧内共通地映现的物体的动作以及移动方向而探测运动物体。信息处理装置探测运动物体并将人体检测的对象区域限定于包含被探测到的运动物体的运动物体区域,因此能够减轻不必要的人体检测引起的负荷。
[0017]
信息处理装置还可以具备输出人体检测部检测到的人体的信息的输出部。信息处理装置能够将基于人体检测部的人体的检测结果实时地输出给显示器等,并向用户提示。
[0018]
信息处理装置还可以具备拍摄拍摄图像的摄像部。信息处理装置通过与摄像部一体构成而能够设为简单的结构。
[0019]
本公开的第二方面,为信息处理方法,包含由计算机执行的如下步骤:运动物体探测步骤,从由鱼眼摄像机拍摄的拍摄图像中探测运动物体;人体判定步骤,通过将包含所述运动物体的运动物体区域的轮廓上的规定的2点间的距离与基于在所述拍摄图像内的所述运动物体的位置测量到的人体的身高而被设定的阈值的范围进行比较,来判定所述运动物体是否为人体;以及人体检测步骤,从包含在所述人体判定步骤中判定为人体的所述运动物体的所述运动物体区域检测人体。
[0020]
发明效果
[0021]
根据本发明,能够实时地精度较好地检测人体。
附图说明
[0022]
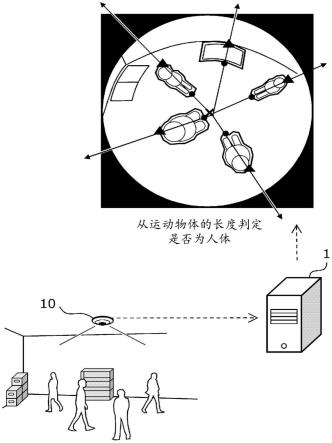
图1是说明实施方式所涉及的信息处理装置的应用例的图。
[0023]
图2是例示信息处理装置的硬件结构的图。
[0024]
图3是例示信息处理装置的功能结构的图。
[0025]
图4是例示人体检测处理的流程图。
[0026]
图5是说明运动物体探测的图。
[0027]
图6是说明计算运动物体的长度的第1例的图。
[0028]
图7(a)和图7(b)是说明计算运动物体的长度的第2例的图。
[0029]
图8是表示与离中心的距离对应的人体的长度的图表。
[0030]
图9(a)和图9(b)是表示按摄像范围的每个区域而被设定的阈值的例子的图。
[0031]
图10是表示判定运动物体是否是人体的判定例的图。
[0032]
图11a和图11b是说明从运动物体区域检测人体的方法的图。
具体实施方式
[0033]
以下,基于附图对本发明的一方面所涉及的实施方式进行说明。
[0034]
《应用例》
[0035]
图1是说明实施方式所涉及的信息处理装置的应用例的图。信息处理装置1取得由摄像机10(摄像部)拍摄的摄像机图像(拍摄图像)。摄像机10例如是搭载了能够取得广范围的图像信息的鱼眼镜头的超广角的摄像机。搭载了鱼眼镜头的摄像机也被称为鱼眼摄像机、全方位摄像机、球形摄像机等,在本说明书使用“鱼眼摄像机”的用语。
[0036]
由鱼眼摄像机拍摄的图像根据拍摄图像内的位置而拍摄对象的外观产生变形。例如,在鱼眼摄像机以从天花板俯视地面的方式而配置的情况下,被拍摄的人物的图像的脚朝向中心,头顶部朝向外侧。人体在拍摄图像的周边称为正面像、背面像或侧面像,在拍摄图像的中央成为上表面像。
[0037]
信息处理装置1从由摄像机10取得的拍摄图像探测运动物体,判定是否为人体。由于由鱼眼摄像机拍摄的人体产生变形,人体的脚和头顶部的距离(人体的身高)根据拍摄图像内的位置而不同。
[0038]
信息处理装置1将根据拍摄图像内的位置而被设想脚和头顶部的距离作为用于判定探测到的运动物体是否为人体的阈值的范围而预先存储。信息处理装置1通过将包含探测到的运动物体的运动物体区域的轮廓上的规定的2点间的距离(运动物体的长度)与对应于拍摄图像内的位置而预先设定的阈值的范围进行比较,能够判定运动物体是否为人体。
[0039]
信息处理装置1解析判定为人体的运动物体区域,检测人体。信息处理装置1能够使用一般的物体识别的算法来检测人体。例如,人体检测的算法能够使用hog或haar-like等结合图像特征和提升方法(boosting)的识别器。另外,人体检测的算法也可以使用基于深度学习(例如r-cnn、faster r-cnn、yolo、ssd等)的人体识别。
[0040]
如上,信息处理装置1通过从拍摄图像探测运动物体,并与对应于拍摄图像内的位置而预先设定的阈值的范围进行比较,能够判定像人体的程度。信息处理装置1限定在拍摄图像中的、包含判定为人体的运动物体的运动物体区域来检测人体。因此,人体检测处理引起的负荷被减轻。
[0041]
《实施方式》
[0042]
(硬件结构)
[0043]
参考图2对信息处理装置1的硬件结构的一例进行说明。图2是例示信息处理装置1的硬件结构的图。信息处理装置1具备处理器101、主存储装置102、辅助存储装置103、通信接口(i/f)104、输出装置105。处理器101通过将存储于辅助存储装置103的程序读取到主存储装置102并执行,实现作为图3中说明的各功能结构的功能。通信接口104是用于进行有线或无线通信的接口。输出装置105例如是进行显示器等的输出的装置。
[0044]
信息处理装置1既可以是个人计算机、服务器计算机、平板终端、智能手机那样的通用的计算机,也可以是板载计算机那样的嵌入式的计算机。信息处理装置1例如既可以通
过基于多台计算机装置的分布式计算来实现,也可以通过云服务器来实现各功能部的一部分。另外,信息处理装置1的各功能部的一部分也可以通过fpga或asic等专用的硬件装置来实现。
[0045]
信息处理装置1通过有线(usb电缆、lan电缆等)或无线(wifi等)与摄像机10连接,接收由摄像机10拍摄的图像数据。摄像机10是具有包括透镜的光学系统以及摄像元件(ccd、cmos等图像传感器)的摄像装置。
[0046]
另外,信息处理装置1也可以与摄像机10(摄像部)一体地构成。此外,对拍摄图像的运动物体检测、人体判定处理等信息处理装置1的处理的一部分也可以由摄像机10执行。进一步地,信息处理装置1进行的人体检测的结果也可以被发送到外部的装置并被提示给用户。
[0047]
(功能结构)
[0048]
参考图3对处理装置1的功能结构的一例进行说明。图3是例示信息处理装置1的功能结构的图。信息处理装置1包括运动物体探测部11、人体判定部12、人体检测部13、输出部14以及判定信息数据库15(判定信息db15)。
[0049]
运动物体探测部11从由摄像机10取得的拍摄图像探测运动物体。运动物体探测部11例如能够利用检测在拍摄图像和预先准备的背景图像之间变化的部位的背景差分法,以及检测在帧间变化的部位的帧间差分法来探测运动物体。也可以基于背景差分和帧间差分两者的差分而探测运动物体。此外,探测运动物体的方法也可以是利用了从连续的帧内共通地映现的部分估计物体的动作及移动方向的光流(optical flow)的方法。
[0050]
人体判定部12判定运动物体探测部11探测到的运动物体是否为人体。人体判定部12例如通过将探测到的运动物体的长度与根据在运动物体位置测量到的人体的身高而设定的阈值的范围进行比较,能够判断运动物体是否为人体。
[0051]
人体检测部13从人体判定部12判定为人体的运动物体的区域检测(识别)人体。人体的检测能够通过深度学习等一般的物体识别技术来实现。
[0052]
输出部14将检测到的人体的信息输出(显示)到显示器等输出装置105。输出部14能够将通过人体检测部13而被检测到的人体用框围起来进行显示,或者从拍摄图像中抽出而进行显示。
[0053]
判定信息数据库15存储人体判定部12为了判定从拍摄图像探测到的运动物体是否为人体而使用的信息。用于判定运动物体是否为人体的信息例如是在基于摄像机10的拍摄图像内根据离中心的距离而设想的人体的长度(身高)。人体判定部12通过将运动物体的长度与作为阈值的范围而存储在判定信息数据库15中的人体的长度进行比较,能够判定运动物体是否为人体。
[0054]
(人体检测处理)
[0055]
参考图4说明人体检测处理的全体流程。图4是例示人体检测处理的流程图。人体检测处理例如是通过摄像机10的电源接通、信息处理装置1从摄像机10接收拍摄图像而开始的。另外,图4所示的人体检测处理是按拍摄图像的每帧而执行的处理。在图4的流程图中,以“拍摄图像”是拍摄图像中包含的1帧而进行说明。
[0056]
在s101中运动物体探测部11取得拍摄图像。运动物体探测部11经由通信接口104而从摄像机10取得拍摄图像。另外,在信息处理装置1与摄像机(摄像部)一体构成的情况
下,运动物体探测部11取得由摄像部拍摄的拍摄图像。
[0057]
在s102中,运动物体探测部11探测在s101中取得的拍摄图像内的运动物体。在此,参考图5说明拍摄图像内的运动物体的探测。信息处理装置1将在没有人体等运动物体的状态下拍摄的背景图像501保持在辅助存储装置103等中。运动物体探测部11提取拍摄图像502与背景图像501的差分的区域作为运动物体区域。在图5所示的输出图像503中,所提取的运动物体区域用框围起来表示。输出图像503表示人体以外的棚由于场所的移动或误识别等而作为运动物体被检测的例子。
[0058]
另外,运动物体探测方法不限于图5中说明的例子,也可以是利用了从连续的帧内共通地映现的部分估计物体的动作及移动方向的光流的方法。
[0059]
在s102中检测到多个运动物体时,对各运动物体反复进行从s103到s105的处理。
[0060]
在s103中,人体判定部12计算判定对象的运动物体的长度。在此,参考图6、图7(a)及图7(b),对计算在通过由鱼眼摄像机(摄像机10)拍摄的图像中探测到的运动物体的长度的2个例子进行说明。
[0061]
在图6的例子中,人体判定部12在运动物体是人的情况下,计算设想为脚的位置的坐标和设想为头顶部的位置之间的距离,作为运动物体的长度。在图7(a)的例子中,人体判定部12计算连接运动物体的重心的坐标和拍摄图像的中心的坐标的直线与运动物体区域的轮廓相交的2点间的距离,作为运动物体的长度。
[0062]
图6是说明计算运动物体的长度的第1例的图。图像600a表示包含在s102中探测到的运动物体的运动物体区域601~运动物体区域605。拍摄图像的中心以
×
符号表示。如图像600a所示,若用鱼眼摄像机拍摄人体,则脚朝向中心,头顶部朝向外侧。
[0063]
图像600b在运动物体是人的情况下用圆形标记表示设想为脚的位置的坐标(以下称为脚坐标)。人体判定部12例如能够取得离运动物体区域中的拍摄图像的中心的坐标(以下称为中心坐标)最近的坐标作为脚坐标。
[0064]
图像600c在运动物体是人的情况下用三角标记表示设想为头顶部的位置的坐标(以下称为头顶部坐标)。人体判定部12例如能够取得通过脚坐标及中心坐标的直线与运动物体区域的轮廓的另1个交点的坐标,作为头顶部坐标。此外,人体判定部12也可以取得离运动物体区域中的中心坐标最远的坐标作为头顶部坐标。
[0065]
人体判定部12计算所取得的脚坐标与头顶部坐标的距离作为运动物体的长度(人体的身高)。另外,在图6的例子中,例示了先取得脚坐标的方法,但人体判定部12也可以先取得头顶部坐标。即,人体判定部12能够取得运动物体区域中离中心坐标最远的坐标作为头顶部坐标,取得通过头顶部坐标及中心坐标的直线与运动物体区域的轮廓的另1个交点的坐标,设为脚坐标。
[0066]
图7(a)和图7(b)是说明计算运动物体的长度的第2例的图。图7(a)的图像700表示包含在s102中探测到的运动物体的运动物体区域601~运动物体区域605。拍摄图像的中心以
×
符号表示。图像700用星号表示运动物体区域的重心的坐标(以下称为重心坐标)。
[0067]
人体判定部12能够计算通过重心坐标和中心坐标的直线与运动物体区域的轮廓相交的2点间的距离,作为运动物体的长度(人体的身高)。在第2例中,即使在人伸手的情况下,人体判定部12也能够精度较好地计算人体的身高。
[0068]
例如,如图7(b)所示,在手的前端离拍摄图像的中心最近的情况下,在第1例的方
法中,手的前端有可能被误识别为是脚。在这种情况下,连接中心坐标和手的前端的坐标的直线,如虚线701所示,有可能不通过人体的头顶部。
[0069]
与此相对,即使在人伸手的状态下,手及手臂的部分也比躯体部分细,因此运动物体区域的重心通常存在于躯体部分。在这种情况下,连接中心坐标和运动物体区域的重心坐标的直线702通过人体的头顶部。从而,人体判定部12在使用了运动物体区域的重心的第2例的方法中,能够与人是怎样的姿势无关地,精度较好地计算人体的身高。
[0070]
在图4的s104中,人体判定部12通过将在s103中取得的运动物体的长度与对应于在拍摄图像内的运动物体的位置而预先设定的阈值的范围进行比较,来判定运动物体是否为人体。在此,参考图8到图10,对用于判定运动物体是否为人体的阈值的范围进行说明。
[0071]
参考图8,对基于鱼眼摄像机的拍摄图像中映现的人体的长度进行说明。图8是表示与离中心的距离对应的人体的长度的图表。横轴是离拍摄图像的中心的距离。从中心到运动物体的距离例如能够设为运动物体区域的重心和拍摄图像的中心的距离。纵轴是拍摄图像内的人体的长度(身高)。
[0072]
站在设置于天花板的鱼眼摄像机的正下方的人体,脚和头顶部位于摄像范围的中心,拍摄图像中的人体长度为0。随着人体离开摄像范围的中心,人体的长度会变大。在图8所示的例子中,当离人体的中心的距离超过r时,人体的长度会变小。如上所述,在基于鱼眼摄像机的拍摄图像中,人体的长度随着离开中心而一时变大,但存在当离中心的距离超过某个值时逐渐变小的倾向。
[0073]
参考图9(a)及图9(b),对对应于拍摄图像内的运动物体的位置而预先设定的人体长度的阈值的范围进行说明。图9(a)和图9(b)是表示按摄像范围的每个区域而被设定的阈值的例子的图。图9(a)的例子所示的摄像范围是将基于鱼眼摄像机的球面的摄像范围平面展开的例子。摄像范围被分割成多个区域,根据离中心的距离被分类为组1到组5。对于各组,设想的人体的长度的范围被设定。
[0074]
图9(a)所示的阈值范围是在高度3m的位置设定鱼眼摄像机而拍摄的1600
×
1200像素(px)的图像中,根据测量到的人体的长度的数据而设定的阈值的例子。
[0075]
在位于摄像范围的中心的组1的区域中,人体的长度被设想为0px~100px。在与组1的区域邻接的组2的区域中,人体的长度被设想为大于组1的100px~200px。在与组2的区域邻接,且处于更外侧的组3的区域中,人体的长度被设想为大于组2的200px~300px。
[0076]
人体的长度以组3的区域为界而变小。在与组3的区域邻接,且处于更外侧的组4的区域中,人体的长度被设想为小于组3的100px~200px。在与组4的区域邻接,且处于更外侧的组5的区域中,人体的长度被设想为小于组4的10px~100px。
[0077]
这样,将摄像范围分割成多个,在每个区域中设想的人体的长度的信息根据摄像机10的设置位置和拍摄图像的像素值等而被预先设定。被设定的人体的长度(阈值的范围)的信息预先存储在判定信息数据库15中。人体判定部12通过将存储于判定信息数据库15的阈值的范围的信息与在s103中取得的运动物体的长度进行比较,能够判定被探测到的运动物体是否为人体。
[0078]
另外,在摄像范围内没有大于人体的物体的情况下,也可以不对各组的阈值的范围设定上限值。在这种情况下,人体判定部12能够将大于图9(a)所示的阈值范围的下限值的运动物体判定为人体。
[0079]
此外,图9(a)示出了将摄像范围作为矩形分割成多个,在每个区域设定阈值的范围的例子,但不限于此。如图9(b)所示,也可以将以圆形表示的摄像范围用多个同心圆分割,在每个区域设定与人体的长度有关的阈值的范围。
[0080]
参考图10,对使用图9(a)中说明的阈值的范围,判定运动物体是否为人体的方法进行说明。图10是表示判定运动物体是否是人体的判定例的图。人体判定部12如图6的图像600c所说明的那样,对于探测到的运动物体区域,取得脚坐标及头顶部坐标而计算运动物体的长度。
[0081]
此外,人体判定部12判定运动物体区域属于摄像范围内的哪个组的区域。例如,人体判定部12能够基于运动物体区域的头顶部坐标来决定属于哪个组的区域。另外,人体判定部12不限于头顶部坐标,也可以基于脚坐标、重心坐标、脚坐标和头顶部坐标的中点等位置来决定运动物体属于哪个组的区域。
[0082]
人体判定部12从判定信息数据库15取得运动物体区域所属的组的阈值的范围。人体判定部12将在s103中计算出的运动物体的长度与从判定信息数据库15取得的阈值的范围进行比较。人体判定部12在运动物体的长度为阈值的范围内的情况下,判定检测到的运动物体为人体。
[0083]
在图10的例子中,图像600c的运动物体区域605,所计算出的运动物体的长度不包含在阈值的范围内,被判定为不是人体。图像1000通过
×
符号表示运动物体区域605未被判定为人体。此外,图像1000将运动物体区域601~运动物体区域604用矩形包围,来表示这些运动物体区域被判定为人体。
[0084]
在图4的s104中,在被探测到的运动物体被判定为人体的情况下(s104:是),处理进入s105。在被探测到的运动物体未被判定为人体的情况下(s104:否),处理进入s106。
[0085]
在s105中,人体检测部13从在s104中被判定为人体的运动物体区域识别并检测人体。人体检测部13能够使用一般的物体识别的算法来检测人体。
[0086]
在此,参考图11a及图11b,对使用cnn从运动物体区域检测人体的方法进行说明。图11a表示在s102中从多个帧间的运动物体差分而探测到运动物体的情况的例子。人体检测部13通过将从运动物体差分探测到的运动物体区域按原样输入cnn,能够检测人体。
[0087]
但是,在通过运动物体差分来探测运动物体的情况下,由于被探测到的运动物体区域是从多个帧的量的区域所探测的,因此如图11a所示,人体有时会被检测得比实际更大。因此,如图11b所示,人体检测部13也可以通过将在运动物体区域内按顺序放置窗口而得到的分割区域输入cnn来检测人体。通过根据窗口而搜索运动物体区域,人体检测部13能够进行适于人体长度的精度较好的检测。
[0088]
另外,人体检测部13也可以通过hog或haar-like等组合了图像特征和提升方法(boosting)的识别器,从运动物体区域进行人体的识别。在这种情况下,也可以对整个运动物体区域进行是否是人体的判定,也可以与图11b所示的方式相同地,通过根据窗口而搜索运动物体区域,来检测并识别运动物体区域内包含的任意长度的人体。
[0089]
在图4的步骤s106中,人体判定部12判定在s102中探测到的运动物体中是否存在未进行是否是人体的判定的其他运动物体。在存在未判定的其它运动物体的情况下(s106:是),处理返回到s103。在不存在未判定的其它运动物体的情况下(s106:否),图4所示的人体检测处理结束。
[0090]
当人体检测处理结束时,输出部14对拍摄图像重叠显示表示检测到的人体的矩形等,并输出到显示器等。
[0091]
(作用效果)
[0092]
在上述实施方式中,信息处理装置1从拍摄图像探测运动物体,并判定探测到的运动物体是否为人体。信息处理装置1在运动物体被判定为人体的情况下,从包含探测到的运动物体的运动物体区域,通过深度学习等方法检测人体。这样,信息处理装置1通过将成为检测人体的对象的区域限定于被判定为人体的运动物体区域,能够减轻深度学习等引起的人体识别的负荷,能够实时地精度较好地对人体进行检测。
[0093]
此外,信息处理装置1在判定探测到的运动物体是否为人体时,将运动物体的长度与对应于拍摄图像内的运动物体的位置而预先设定的阈值的范围进行比较。在鱼眼摄像机所拍摄的图像中,被拍摄的人体根据拍摄图像内的位置而产生变形。由于根据拍摄图像内的位置而设想的人体的长度不同,所以用于判定是否为人体的阈值的范围被设定在与拍摄图像内的位置对应的范围内。这样,考虑基于鱼眼摄像机的拍摄图像的特性,设定与拍摄图像内的位置或区域对应的阈值的范围,因此信息处理装置1能够精度较好地判定是否是人体。
[0094]
《其他》
[0095]
上述实施方式仅对本发明的结构例进行例示性说明。本发明不限于上述的具体的形态,在其技术思想的范围内可以进行各种变形。
[0096]
在上述实施方式中,表示了用于判定是否为人体的阈值的范围是将摄像范围分割为多个区域并按每个区域而预先设定的例子,但不限于此。例如,用于判定是否为人体的阈值的范围,也可以根据从拍摄图像的中心到运动物体区域的重心的距离,通过规定的计算式来计算。
[0097]
此外,用于判定是否为人体的阈值的范围,也可以根据成为主要拍摄对象的人体的性别或年龄层而被设定不同的值的范围。
[0098]
《附记1》
[0099]
(1)一种信息处理装置(1),具备:
[0100]
运动物体探测部(11),从由鱼眼摄像机拍摄的拍摄图像中探测运动物体;
[0101]
人体判定部(12),通过将包含所述运动物体的运动物体区域的轮廓上的规定的2点间的距离与基于在所述拍摄图像内的所述运动物体的位置测量到的人体的身高而被设定的阈值的范围进行比较,来判定所述运动物体是否为人体;
[0102]
人体检测部(13),从包含由所述人体判定部判定为人体的所述运动物体的所述运动物体区域中检测人体。
[0103]
(2)一种信息处理方法,包含:
[0104]
由计算机执行的以下步骤:
[0105]
运动物体探测步骤(s102),从由鱼眼摄像机拍摄的拍摄图像中探测运动物体;
[0106]
人体判定步骤(s103、s104),通过将包含所述运动物体的运动物体区域的轮廓上的规定的2点间的距离与基于在所述拍摄图像内的所述运动物体的位置测量到的人体的身高而被设定的阈值的范围进行比较,来判定所述运动物体是否为人体;
[0107]
人体检测步骤(s105),从包含在所述人体判定步骤中判定为人体的所述运动物体
的所述运动物体区域检测人体。
[0108]
附图标记说明
[0109]
1:信息处理装置、10:摄像机、11:运动物体探测部、12:人体判定部、13:人体检测部、14:输出部、15:判定信息数据库
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1