用于开环编解码器中的HDR成像的图像预测的制作方法
本发明总体上涉及图像。更具体地,本发明的实施例涉及用于开环编解码器中的高动态范围(hdr)成像的图像预测。
背景技术:
1、如本文所使用的,术语‘动态范围(dr)’可以涉及人类视觉系统(hvs)感知图像中的强度(例如光亮度(luminance)、亮度(luma))范围的能力,该强度范围例如是从最暗的灰色(黑色)到最亮的白色(高光)。从这个意义上说,dr与‘参考场景的(scene-referred)’强度有关。dr还可以涉及显示设备充分或近似渲染特定阔度(breadth)的强度范围的能力。从这个意义上说,dr与‘参考显示的(display-referred)’强度有关。除非在本文的描述中的任何一点明确指定特定的意义具有特定的意思,否则应该推断为所述术语可以在任一意义上例如可互换地使用。
2、如本文所使用的,术语“高动态范围(hdr)”涉及跨越人类视觉系统(hvs)的14到15个数量级的dr阔度。实际上,相对于hdr,人类可以同时感知强度范围广泛阔度的dr可能会被稍微截短。
3、实际上,图像包括一个或多个颜色分量(例如,亮度y以及色度cb和cr),其中,每个颜色分量由每像素n位的精度表示(例如,n=8)。使用线性或伽马光亮度编码,其中n≤8的图像(例如,彩色24位jpeg图像)被视为标准动态范围的图像,而其中n>8的图像可被视为增强或高动态范围的图像。hdr图像还可以使用高精度(例如,16位)浮点格式来存储和分布,如由工业光魔公司(industrial light and magic)开发的openexr文档格式。
4、大多数消费者桌面显示器目前支持200到300cd/m2或尼特的光亮度。大多数消费类hdtv的范围从300到500尼特,其中,新型号达到1000尼特(cd/m2)。因此,这样的传统显示器代表了与hdr相关的较低动态范围(ldr),也被称为标准动态范围(sdr)。随着hdr内容的可用性由于捕获设备(例如,相机)和hdr显示器(例如,杜比实验室的prm-4200专业参考监视器)二者的发展而增加,hdr内容可以被颜色分级并被显示在支持更高动态范围(例如,从1,000尼特到5,000尼特或更高)的hdr显示器上。
5、如本文所使用的,术语“整形(reshaping)”或“重新映射(remapping)”表示数字图像从其原始位深度和原始码字分布或表示(例如,伽马、pq或hlg等)到相同或不同位深度和不同码字分布或表示的图像的样本到样本映射或码字到码字映射的过程。整形允许以固定的比特率改善可压缩性或改善图像质量。例如,非限制性地,可以将前向整形应用于10位或12位pq编码的hdr视频,以提高10位视频编码架构中的编码效率。在接收器中,在对接收到的信号进行解压缩(可能会或可能不会进行整形)之后,接收器可以应用逆向(或后向)整形函数以将信号恢复为其原始码字分布和/或实现更高的动态范围。
6、在hdr编码中,图像预测(或整形)允许使用基线标准动态范围(sdr)图像和一组表示后向整形函数的预测系数来重建hdr图像。传统设备可以简单地解码sdr图像;然而,hdr显示器可以通过对sdr图像应用后向整形函数来重建hdr图像。在视频编码中,这种图像预测可用于提高编码效率同时保持后向兼容性。在编码器包括解码路径并且预测系数基于原始和解码的sdr和hdr数据得出的情况下,此类系统可称为“闭环”,或在没有这样的解码环路并且预测系数仅基于成对的原始数据得出的情况下,此类系统可称为“开环”。这里正如发明人所理解的,需要用于开环编解码器的高效图像预测的改进技术。
7、在本节中描述的方法是可以采用的方法,但不一定是先前已经设想到或采用过的方法。因此,除非另有指示,否则不应该认为本节中描述的任何方法仅凭其纳入本节就可被视为现有技术。类似地,除非另有指示,否则关于一种或多种方法所认定的问题不应该基于本节而认为在任何现有技术中被认定。
技术实现思路
1、本文描述的示例实施例涉及图像预测技术。在实施例中,在包括一个或多个处理器的装置中,处理器接收表示相同场景的高动态范围(hdr)和标准动态范围(sdr)的输入参考图像对。处理器:
2、至少基于hdr图像的特征生成具有噪声强度的噪声数据;
3、通过将噪声数据添加到sdr图像来生成噪声输入数据集;
4、基于hdr图像生成第一增强输入数据集;
5、组合sdr图像和噪声输入数据集以生成第二增强输入数据集;
6、生成预测模型以基于第二增强输入数据集预测第一增强输入数据集;
7、根据最小化误差准则求解预测模型以生成一组预测模型参数;
8、压缩第二输入图像以生成压缩的比特流;以及
9、生成包括压缩的比特流和预测模型参数的输出比特流。
10、示例hdr编码系统
11、图1a图示了使用图像预测的示例单层解码器架构,该架构可以用下游视频解码器中的一个或多个计算处理器来实现。图1b图示了示例“开环”编码器架构,该架构也可以用一个或多个上游视频编码器中的一个或多个计算处理器来实现。图1c图示了示例“闭环”编码器架构。
12、在这个框架下,给定参考hdr内容(120),对应的sdr内容(125)(即表示与hdr内容相同的图像、但被颜色分级并表示在标准动态范围内的内容)由实现编码器侧编解码器架构的上游编码设备在编码视频信号(144)的单个层中编码并传输。sdr内容(144)由下游解码设备在视频信号的单个层中接收并解码。预测元数据(例如,后向整形参数)(152)也与sdr内容一起在视频信号中被编码并传输,使得hdr显示设备可以基于sdr内容(144)和所接收到的元数据(152)来重建hdr内容。
13、在图1b和图1c中,在实施例中,给定输入hdr数据(120),sdr数据(125)可以通过色调映射、前向整形、手动(在颜色分级期间)或通过本领域已知技术的组合从hdr数据生成。在另一实施例中,给定参考sdr数据(125),hdr数据(120)可以通过逆色调映射、后向整形、手动(在颜色分级期间)或通过本领域已知技术的组合从sdr数据生成。压缩块140(例如,根据如avc、hevc、av1等任何已知视频编码算法实现的编码器)将sdr图像(125)压缩/编码到编码比特流的单个层144中。
14、由单元150生成的元数据(152)可以作为视频信号144的一部分例如作为补充增强信息(sei)消息传递被多路复用。因此,可以在编码器侧生成或预生成元数据(152),以利用在编码器侧可获得的强大的计算资源和离线编码流程(包括但不限于内容自适应多轮次、超前操作、逆亮度映射、逆色度映射、基于cdf的直方图近似和/或传递等)。
15、图1b和图1c的编码器架构可以用于避免将输入hdr图像(120)直接编码为视频信号中的编码/压缩hdr图像;相反,视频信号中的元数据(152)可以用于使下游解码设备能够将(在视频信号中编码的)sdr图像(125)重建为与参考hdr图像(120)相同或接近/最佳近似的重建的hdr图像(167)。
16、在一些实施例中,如图1a所图示的,在编解码器框架的解码器侧接收具有压缩sdr图像的视频比特流(144)和具有由编码器生成的预测参数的元数据(152)作为输入。解压缩块160将视频信号的单个层(144)中的压缩视频数据解压缩/解码为解码的sdr图像(162)。解压缩160通常对应于压缩140的逆过程。解码的sdr图像(162)可以与sdr图像(125)相同,视压缩块(140)和解压缩块(160)中的量化误差而定,这些误差可能已经针对sdr显示设备进行了优化。解码的sdr图像(162)可以在输出sdr视频信号中输出(例如,通过hdmi接口、通过视频链路等)以在sdr显示设备上渲染。
17、此外,预测块165(也可称为“合成器”)将来自输入比特流的元数据(152)应用于解压缩的数据(162)以生成重建的hdr图像(167)。在一些实施例中,重建的图像表示与参考hdr图像(120)相同或接近/最佳近似的生产质量或接近生产质量的hdr图像。重建的图像(167)可以在输出hdr视频信号中输出(例如,通过hdmi接口、通过视频链路等)以在hdr显示设备上渲染。
18、在一些实施例中,作为在hdr显示设备上渲染后向整形的图像(167)的hdr图像渲染操作的一部分,可以对重建的图像(167)执行特定于hdr显示设备的显示管理操作。
19、图1b描绘了“开环”编码架构,其中,元数据152由单元150仅使用输入hdr和sdr图像生成。图1c描绘了包括附加解压缩块(160)的“闭环”编码架构。闭环设计使用额外的视频解压缩步骤160,模仿解码器的操作方式。这提供了更准确的数据描述以生成(例如,在块150中)预测参数;但是,它需要额外的解码步骤。这在以单一比特率或配置文件生成比特流时很好,但当服务器需要以多种比特率(通常称为“比特率阶梯”)生成流时,计算量更大。因此,如发明人所理解的,改进开环架构以在降低计算复杂度的同时提供与闭环系统一样好或更好的性能是有益的。
20、改进开环系统中的预测的示例系统
21、单通道预测器
22、考虑输入数据{xi}和观测的输出数据的对,其中,i=0,1,…,p-1,其中,输出生成为
23、
24、其中,f(g)表示具有参数的k(g)阶“基准真值(ground truth)”多项式模型,并且不失一般性地,表示具有零均值和方差(σ(g))2的加性高斯白噪声,表示为令
25、
26、表示模型中系数的向量,并且令
27、
28、表示观测的输出数据的向量。
29、在传统的预测建模下,给定p个基准真值数据的集合,
30、希望使用一个新的k(c)阶多项式模型f(c)构建预测模型,由下式给出
31、
32、其中,多项式系数的向量表示为
33、
34、给定表示
35、
36、等式(4)可以表示为:
37、
38、给定等式(7),可以定义一组最佳多项式系数以最小化观测数据与预测数据之间的误差,
39、
40、其中,在最小均方误差(mse)优化下,最优解由下式给出
41、m(c),opt=((s(c))t(s(c)))-1((s(c))ty(g))。 (8)
42、只要预测器可以访问原始xi数据,等式(7)的模型就可以很好地工作。将此场景视为闭环架构的近似,其中解压缩器160提供解码器将看到的非常准确的sdr数据副本。但是,如果这样的数据不可用怎么办?在实施例中,为了更好地考虑可用xi数据中的不确定性(例如,在开环架构下)以构建更稳健的预测器,建议生成并使用通过将高斯白噪声(例如,)添加到原始输入{xi|i=0,1,....,p-1}而生成的一组重复的输入数据因此,
43、
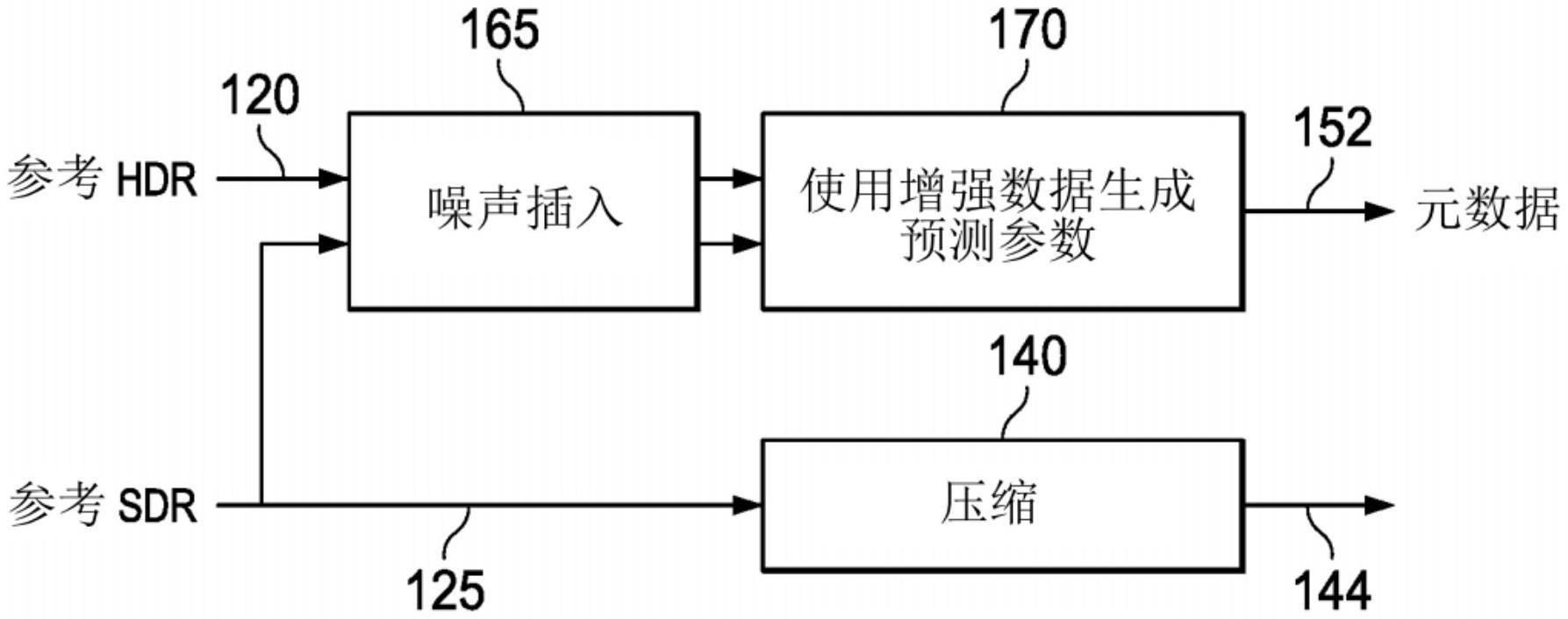
44、图1d描绘了根据实施例的支持所提出的增强数据预测模型的开环架构的示例。与图1b相比,图1d中的架构还包括生成有噪声的sdr和/或hdr数据的噪声插入模块(165)。然后将原始的和有噪声的sdr以及hdr数据组合以形成增强的sdr和hdr数据,这些数据被馈送到单元170以求解增强数据预测模型的预测参数。增强输入数据集可以表示输入图像和噪声输入数据集的组合。
45、在实施例中,这个新的增强数据预测模型的观测数据被认为与相同,
46、
47、在另一实施例中,也可以在对观测数据建模时加入噪声;然而,实验结果表明,通过对观测数据中的噪声进行建模并没有带来显著改善,因此,不失一般性地,在随后的讨论中,为简化预测建模,将不考虑此类噪声。
48、给定两组训练数据对,例如和一个新的k(n)阶(例如,k(n)=k(c))多项式模型f(n)可以表示为:
49、
50、同样,给定输入和输出数据的矩阵/向量表示由下式给出:
51、
52、
53、通过组合新旧数据集,可以组成组合(或增强)的数据集
54、
55、并且增强数据预测模型可以表示为
56、
57、求解m(n)可以表述为优化问题:
58、
59、其中最优解(在mse下)由下式给出
60、m(n),opt=((s(n))t(s(n)))-1((s(n))ty(n))。 (16)
61、图2描绘了根据实施例的用于构建增强数据预测器的示例过程。如图2所描绘的,此过程的输入是输入数据和可观测数据的对,例如,对。在步骤205中,通过向原始输入数据添加噪声来生成有噪声的(或微扰的)输入数据(例如,参见等式(9))。从预测器的角度来看,在步骤215的输出处,现在有一组增强的输入数据(例如,),其包括原始的输入数据和有噪声的输入数据。在步骤210中,可选地基于输入可观测数据生成有噪声的(或微扰的)可观测数据(例如,),或者为从预测器的角度来看,在步骤220之后,现在有一组增强的可观测数据和有噪声的可观测数据(例如,或)。最后,在步骤225中,求解增强数据预测模型的系数(例如,参见等式(16))。
62、使用多通道模型的增强数据预测
63、前面的讨论使用了相对简单的单通道预测模型。在该部分中,该方法扩展到多通道回归模型,例如但不限于参考文献[1]和参考文献[2]中所描述的。作为示例,不失一般性地,将针对使用多通道多元回归(mmr)预测器(参考文献[1])的实施例描述详细的方法;然而,本领域技术人员应该能够将该方法扩展到其他模型,例如张量积b样条(tpb)模型(参考文献[2])。
64、考虑一视频序列,其中,第t帧中的样本(例如,sdr图片)表示为i=0,1,…,p-1,其中,每个像素具有三个颜色分量y、c1和c2,例如(ycbcr、rgb、ictcb等)。例如,sdr图像(125)可以表示100尼特和r709色域的图像数据,而对应的hdr图像(120)可以表示4,000尼特和p3色域的图像数据。使用mmr模型,令输出表示为以下组合(其中,ch表示y、c0或c1)
65、
66、例如,在实施例中,使用具有叉积mmr表示的二阶,向量可以使用15个值表示为
67、
68、在等式(17a-17b)中,在一些实施例中,可以去除一些项以减少计算负荷。例如,可以在模型中仅使用色度分量之一,或者可以完全消除某些高阶交叉分量。并非限制,也可以采用替代的线性或非线性预测器。
69、令
70、
71、那么,可观测数据(例如,hdr图片)可以表示为
72、
73、并且整个基准真值模型可以表示为
74、
75、其中,
76、
77、表示加性噪声,例如,
78、注:使用高斯白噪声可以被视为使用最差噪声对开环问题中的量化噪声进行建模。本领域技术人员将理解,可以使用本领域已知的替代模型(例如拉普拉斯、柯西模型等)来对这样的噪声进行建模。
79、给定矩阵形式的mmr模型
80、
81、可以再次使用最小化问题来计算传统预测器的参数,例如
82、
83、其中最优解(在mse下)由下式给出
84、
85、其中,
86、
87、可以根据图2中描述的方法设计增强数据预测器。与单通道情况一样(参见步骤205),给定输入通过添加噪声(例如,分布为的高斯噪声)生成新的噪声或微扰集例如,
88、
89、令
90、
91、以及
92、
93、如果观测数据保持与相同(例如,跳过步骤210),则
94、
95、以及
96、
97、在步骤215和220中,组合新旧数据集,得到
98、
99、最后,在步骤225中,优化问题
100、
101、可以使用最小化最小二乘法求解
102、
103、在另一实施例中,可以使用额外的微扰输入和/或输出数据集(例如通过对每个微扰集使用不同的噪声方差)来增强数据。例如,可以创建若干组的和生成(例如,在步骤215和220中)组合数据集:
104、
105、预测模型的解仍由等式(29)给出。
106、噪声强度选择注意事项
107、增强数据预测模型的一个关键部分是通过向原始输入数据添加噪声来生成微扰的(或有噪声的)数据。那么,问题来了:应该添加多少噪声?直观地,在视频编码中,比特率越高则量化噪声越低,因此,影响添加噪声量的至少一个参数可以是压缩的比特流的目标比特率。
108、如本文所使用的,术语“范围内”表示要在预测模型中使用的原始测试数据或训练数据的像素范围(例如,[a,b])。如本文所使用的,术语“超出范围下限”表示低于预测模型中使用的最小范围内值(例如,a)的像素值。例如,这些可能是黑色值非常低的图像。如本文所使用的,术语“超出范围上限”表示高于预测模型中使用的最大范围内值(例如,b)的像素值。例如,这些可能是高光值非常高的图像。
109、实验结果表明,对于任何超出范围的数据,随着噪声方差的增加,增强数据预测器总是更好;然而,对于范围内的数据,只有当添加的噪声的标准偏差低于某个“最佳”值(表示为)时,增强数据预测器才会更好。因此,可以将此最佳噪声方差表示为
110、
111、其中表示使用具有标准偏差的高斯白噪声的增强输入数据的平均失真度量,并且表示使用传统预测模型预测的平均失真,例如,
112、
113、这些观测值表明影响噪声强度的另一参数是输出(例如,hdr)数据的动态范围,特别是hdr输入中色度颜色分量的动态范围。实验数据也表明,p值越大,则增强数据模型越稳健;然而,在实践中,由于计算量大,几乎不会直接对所有像素值进行操作。相反,可以使用子采样图像或“平均”像素值进行操作。例如,可以将输入信号码字划分成具有相等间隔wb(例如,对于16位输入数据,wb=65,536/m)的m个非重叠箱(bin)(例如,m=16、32或64),以覆盖整个归一化动态范围(例如,(0,1])。然后,不是以像素值进行操作,而是可以以每个这样的箱内的平均像素值进行操作。将hdr箱(bin)的数量(也称为三维映射表(3dmt))表示为pt,则在实施例中,可以基于以下启发式推导噪声强度
114、
115、其中,给定
116、
117、
118、则
119、
120、表示观测数据的有效动态范围,μ表示最大噪声强度(例如,μ=0.08),δp是根据输入数据计数控制扩展的参数(例如,δp=3,000),并且δr是根据观测数据范围控制扩展的参数(例如,当位深度=16位时δp=7,000)。当输入增加时,该模型提供较慢的衰减。
121、在另一实施例中,一种替代方法是在指数函数内提供具有更高阶项的更快衰减:
122、
123、其中,α>1。
124、在实施例中,在等式(32)和(34)中都可以添加与比特率相关的乘数因子,例如:
125、
126、其中,δb是根据用于生成噪声的平均比特率控制扩展的参数(例如,δb=2mb/s)。例如,在高比特率(例如,5.2mb/s或更高)下,噪声强度可能几乎为零。在实施例中,在等式(35)中,每个指数因子中的α的值可以具有不同的值(例如,每个α可以由不同的值(例如αp、αr和αb)代替)。
127、在实施例中,可以为每个目标比特率生成优化的噪声强度,从而为每个比特率生成一组专用的预测参数。在另一实施例中,服务提供者可能希望使用一组(或仅仅几组)。例如,对于一组优化的mmr参数,可以使用最坏的可能场景(例如,最低比特率下的最小分辨率)来添加噪声。在这样的场景中,等式(35)中的比特率相关指数项可以被认为是可以吸收到μ的固定值(例如,参见等式(34))。
128、给定启发式噪声模型(参见等式(35)),图3描绘了用于开环3dmt架构(例如,如图1d所描绘的)的增强数据预测的示例过程。将参考hdr输入的第t帧的第i像素的颜色分量值表示为将对应的sdr像素值表示为将每个颜色通道中的最小值和最大值在sdr图像中表示为并且在hdr图像中表示为
129、如图3所描绘的,该过程在步骤305以构建3dmt表示开始,(另见参考文献[3-4]),可以总结如下:
130、a)在每个通道中,对每个分量使用固定数量的箱来量化sdr图像的动态范围。该分区可以使用在每个维度上覆盖最小/最大范围的统一分区边界来计算3d直方图。每个通道中的量化间隔由下式给出:
131、
132、将3d直方图箱表示为其中,因此,总共包含个箱,使得每个3d箱由箱索引指定,该箱索引表示具有这些3通道量化值的像素数量。为了简化符号,可以将3d箱索引{q}向量化到1-d索引{q}。
133、
134、b)针对每个3d箱计算hdr中的每个颜色分量之和。令和是hdr图像域中映射的亮度和色度值,使得这些箱中的每个箱都包含所有hdr亮度和两个色度(分别为c0和c1)像素值之和,其中,对应的像素值位于该箱中。假设有p个像素,操作可以用伪代码总结如下:
135、
136、c)找到具有非零像素数的3d直方图箱。换言之,收集所有非零条目来设置计算hdr和sdr的平均值。
137、
138、将中的元素数量表示为pt。令,
139、
140、以及
141、
142、然后,对于中的元素,有映射对和
143、在步骤310中,噪声强度可以按如下方式计算:给定pt、3dmt箱的数量,在实施例中,可以计算色度范围rt作为两个颜色通道中的动态范围的平均值:
144、
145、然后,噪声强度可以按等式(34)或(35)计算。
146、在另一实施例中,噪声标准偏差可以针对亮度和每个颜色分量分别计算,其代价是更高的复杂度。可替代地,可以不通过平均色度范围而是使用两个色度范围的最大值或最小值来计算rt。不过总的来说,以改善色度质量为目标的实验结果表明,如所述的计算rt以合理的复杂度成本产生令人满意的结果。
147、在步骤315中,不失一般性地,假设mmr预测模型、给定等式(36b)、sdr输入数据集可以被表述为
148、
149、收集所有pt个条目,得到
150、
151、同样地,3dmt hdr色度值的向量形式可以表示为:
152、并且
153、在步骤320,向每个3dmt条目添加噪声
154、
155、得到的是有噪声的输入3dmt数据,由以下等式给出
156、
157、其中,每个通道的噪声具有相同的分布,例如,
158、
159、在步骤325,增强输入3dmt数据集生成如下:将有噪声的输入的mmr扩展形式表示为
160、
161、然后,对于
162、
163、并且
164、增强数据集由下式给出
165、以及
166、在实施例中,在步骤330中,新的预测模型可以描述为:
167、
168、
169、最优解(在mse准则下)由(参考文献[3-4])给出
170、
171、参考文献
172、这些参考文献中的每一篇都通过引用以其全文并入本文。
173、1.g-m.su等人,“multiple color channel multiple regression predictor[多颜色通道多元回归预测器]”,美国专利8,811,490。
174、2.g-m su等人,“tensor-product b-spline predictor[张量积b样条预测器]”,2019年10月1日提交的美国临时专利申请号62/908,770。
175、3.n.j.gadgil和g-m.su,“linear encoder for image/video processing[用于图像/视频处理的线性编码器]”,2019年2月28日提交的pct申请号pct/us 2019/020115,公布为wo 2019/169174。
176、4.q.song等人,“high-fidelity full reference and high-efficiencyreduced reference encoding in end-to-end single-layer backward compatibleencoding pipeline[端到端单层后向兼容编码流水线中的高保真全参考和高效减参考编码]”,wipo pct公布为wo2019/217751,2019年11月14日。
177、示例计算机系统实施方式
178、本发明的实施例可以利用计算机系统、以电子电路和部件来配置的系统、集成电路(ic)设备(如微控制器、现场可编程门阵列(fpga)或另一个可配置或可编程逻辑器件(pld)、离散时间或数字信号处理器(dsp)、专用ic(asic))和/或包括这样的系统、设备或部件中的一个或多个的装置来实施。计算机和/或ic可以执行、控制或实行与图像预测技术相关的指令,如本文所描述的那些指令。计算机和/或ic可以计算与本文所描述的图像预测技术的生成相关的各种参数或值中的任何参数或值。图像和视频动态范围扩展实施例可以以硬件、软件、固件及其各种组合来实施。
179、本发明的某些实施方式包括执行软件指令的计算机处理器,所述软件指令使处理器执行本发明的方法。例如,显示器、编码器、机顶盒、转码器等中的一个或多个处理器可以通过执行处理器可访问的程序存储器中的软件指令来实施用于如上所述的图像预测技术的方法。还可以以程序产品的形式提供本发明。程序产品可以包括承载一组计算机可读信号的任何非暂态且有形介质,所述一组计算机可读信号包括指令,所述指令当由数据处理器执行时使数据处理器执行本发明的方法。根据本发明的程序产品可以采用各种非暂态且有形形式中的任何一种。程序产品可以包括例如物理介质,如包括软盘、硬盘驱动器的磁性数据存储介质、包括cd rom、dvd的光学数据存储介质、包括rom、闪速ram的电子数据存储介质等。程序产品上的计算机可读信号可以可选地被压缩或加密。
180、在上面提到部件(例如,软件模块、处理器、组件、设备、电路等)的情况下,除非另有说明,否则对此部件的引用(包括对“装置”的引用)都应被解释为包括为此部件的执行所描述部件的功能的任何部件的等效物(例如,功能上等同的),包括在结构上不等同于执行在本发明的所图示示例实施例中的功能的所公开结构的部件。
181、等同物、扩展、替代方案和杂项
182、因此,描述了与图像预测技术有关的实施例。在前述说明书中,已经参考可以根据实施方式而变化的许多具体细节描述了本发明的实施例。因此,指明本发明以及申请人的发明意图的唯一且排他性指示是根据本技术以具体形式发布的权利要求组,其中,这样的权利要求发布包括任何后续修正。本文中针对这样的权利要求中包含的术语明确阐述的任何定义应该支配如在权利要求中使用的这样的术语的含义。因此,权利要求中未明确引用的限制、要素、性质、特征、优点或属性不应该以任何方式限制这样的权利要求的范围。因此,应当从说明性而非限制性意义上看待本说明书和附图。
183、可以从以下枚举的示例实施例(eee)中理解本发明的各个方面:
184、1.一种用于使用处理器生成预测系数的方法,所述方法包括:
185、访问第一动态范围中的第一输入图像(120)和第二动态范围中的第二输入图像(125),其中,所述第一输入图像和所述第二输入图像表示相同的场景;
186、至少基于所述第一输入图像的特征生成具有噪声强度的噪声数据;
187、通过将所述噪声数据添加到所述第二输入图像来生成噪声输入数据集;
188、基于所述第一输入图像生成第一增强输入数据集;
189、组合所述第二输入图像和所述噪声输入数据集以生成第二增强输入数据集;
190、生成预测模型以基于所述第二增强输入数据集预测所述第一增强输入数据集;
191、根据最小化误差准则求解所述预测模型以生成一组预测模型参数;
192、压缩所述第二输入图像以生成压缩的比特流;以及
193、生成包括所述压缩的比特流和所述预测模型参数的输出比特流。
194、2.如eee 1所述的方法,进一步包括,在解码器中:
195、接收包括所述压缩的比特流和所述预测模型参数的所述输出比特流;
196、解码所述输出比特流以生成所述第二动态范围中的第一输出图像;以及
197、将所述预测模型参数应用于所述第一输出图像以生成所述第一动态范围中的第二输出图像。
198、3.如eee 1或eee 2所述的方法,其中,所述第一动态范围包括高动态范围,并且所述第二动态范围包括标准动态范围。
199、4.如eee 1至3中任一项所述的方法,其中,生成所述噪声数据包括:
200、基于所述第一输入图像的像素值计算统计数据;
201、基于所述统计数据计算噪声标准偏差;以及
202、使用具有零均值和所述噪声标准偏差的高斯分布生成所述噪声数据的噪声样本。
203、5.如eee 4所述的方法,其中,计算所述噪声标准偏差进一步基于用于生成所述压缩的比特流的目标比特率和/或所述第二输入图像的特征。
204、6.如eee 4或eee 5所述的方法,其中,计算所述统计数据包括计算以下一项或多项:所述第一输入图像中的像素值的总数量、所述第一输入图像的亮度分量中的像素值的范围、所述第一输入图像的色度分量中的像素值的范围、或表征表示所述第一输入图像的平均像素值的分组的箱的数量。
205、7.如eee 1至6中任一项所述的方法,其中,所述预测模型包括单通道预测器、多通道多元回归(mmr)预测器。
206、8.如eee 1至7中任一项所述的方法,其中,求解所述预测模型包括最小化所述预测模型的输出与所述第一输入图像之间的误差度量。
207、9.如eee 8所述的方法,其中,生成该组预测模型参数包括计算
208、
209、其中,表示所述预测模型参数的向量表示,表示所述第一增强输入数据集,并且表示基于所述第二增强输入数据集的矩阵。
210、10.如eee 9所述的方法,其中,对于颜色分量ch,
211、并且
212、其中,表示所述第一增强输入数据集的像素值,包括所述第一输入图像的像素值,并且包括所述第一输入图像的像素值,其中或者包括具有添加的噪声的所述第一输入图像的像素值。
213、11.如eee 1至10中任一项所述的方法,进一步包括:
214、基于所述第一输入图像的修改的表示生成第一修改的数据集;
215、基于所述第二输入图像的修改的表示生成第二修改的数据集;
216、通过将所述噪声数据添加到所述第二修改的数据集来生成所述噪声输入数据集;
217、基于所述第一修改的数据集生成所述第一增强输入数据集;以及
218、组合所述第二修改的数据集和所述噪声输入数据集以生成所述第二增强输入数据集。
219、12.如eee 11所述的方法,其中,所述第一修改的数据集包括所述第一输入图像的子采样版本或所述第一输入图像的三维表映射(3dmt)表示。
220、13.如eee 11或eee 12所述的方法,其中,所述第二修改的数据集包括所述第二输入图像的子采样版本或所述第二输入图像的三维表映射(3dmt)表示。
221、14.一种非暂态计算机可读存储介质,其上存储有用于用一个或多个处理器执行根据eee 1至13中任一项所述的方法的计算机可执行指令。
222、15.一种装置,包括处理器并且被配置为执行如eee 1至13所述的方法中的任一种方法。
- 还没有人留言评论。精彩留言会获得点赞!