用于确定在车辆环境中的自由空间的方法与流程
本发明涉及用于确定在车辆的车辆环境中至少一个自由空间的方法、计算机程序产品、用于车辆的控制装置、具有该控制装置和车辆传感器的驾驶员辅助系统、以及车辆。
背景技术:
1、对于车辆中不同的驾驶员辅助系统(如电子车距报警器、自动化停车)以及对于自主行驶的多个阶段(例如识别行车道)需要采集(静态)车辆环境。对于驾驶员辅助系统(如自动化停车或电子车距报警器)通常使用超声波传感器。用于更普遍地识别静态环境的其他传感器例如是相机传感器、激光扫描仪或雷达传感器。
2、静态环境的说明可以通过轮廓信息来实现。这些轮廓信息与测量原理的方式和用于识别并滤波的信号处理有关。在雷达传感器和激光扫描仪中,静态环境的说明可以借助于点的列表来实现。点的数量与测量原理、信号处理和观测时间有关。获得这样的轮廓信息的车辆组件例如可以通过can(控制器局域网)或以太网连接。这样的接口具有受限的带宽且可能需要显著减少当前传输的数据。数据减少的必要性的另一原因是用于接收器的运算耗费,该运算耗费同样可能是受限的。
3、附加于所述受限的带宽,不需要在车辆的控制装置中用于随后处理步骤的数据量。大多数驾驶员辅助功能不需要所有所识别的轮廓或所收集的轮廓信息。最多和经常作为唯一需要的信息是自身车辆(也称为本车辆)周围的自由的空间或者说自由空间,以便例如评估碰撞的概率或计算行驶路径。
4、受限的带宽导致另一期望的要求。该要求在于如下可能性,即,在限定的视场内在每个位置上保证静态的分辨率。
5、从现有技术来看,有不同的方案,以便识别静态车辆环境并提取自由空间信息。自由空间信息可以限定为对于在视场内所有的方向,在本车辆与最近的(一个或多个)静态对象之间的空间。换言之,这就是在所有相关方向上,在本车辆与所有周围的静态对象之间的(可行驶的)空间。
6、用于识别静态轮廓的典型的方案是证据网格(beweisgitter),如其由m.schreier等人的“from grid maps to parametric free space maps–a highly compact,genericenvironment representation for adas”(ieee intelligent vehicle symposium[iv2013])”中所已知的那样。根据如下测量将每个网格单元标记为占用或未占用,在最后的测量周期期间可以将所述测量配设给该单元。存在不同的可能性,即,例如基于统计函数来决定:一个网格单元是占用的。在这种情况下,自由空间的提取是容易的:所述自由空间由本车辆周围以及在本车辆与最近的占用的网格单元之间的所有未占用的单元组成。为此,也参见hesham m.eraqi、jens honer以及sebastian zuther的““static free spacedetection with laser scanner using occupancy grid maps”(arxiv preprint arxiv:1801.00600[2018])”以及hundelshausen、f.,&wuensche、h.-j.(2011年6月)的schmid,m.r.、ates,s.、dickmann,j.的“parking space detection with hierarchical dynamicoccupancy grids”(2011ieee intelligent vehicles symposium[iv],254-259页)”。
7、这种方法非常普遍且提供了信号处理的容易的可能性。然而,所提取的数据的分辨率直接与网格单元的尺寸有关,且用于生成网格单元信息——所述网格单元信息用作自由空间分析处理的基础——的运算耗费(或者运行时间)非常高。
8、用于自由空间估计的另一方法(假定轮廓已经存在)是计算线的交点,在本位置[0,0]以最近的轮廓元素开始。该线以静态或动态的角度段旋转(在本位置的静态原点),且对于每个步骤来分析处理与处于最近的轮廓元素的交点。
9、一个非常类似的变型可以在于,使用旋转的角度段且以第一个识别所在的区域进行检查。
10、该方法同样是非常常见的,但是随着交点的增大的作用范围,自由空间边界的分辨率下降。此外,该方法依赖于直接的视线。该方法不能识别由轮廓覆盖的自由空间,且该方法不能在拐角周围进行观察。这限制了用于自动化行驶的可应用性,因为它需要非常小的速度以用于识别交叉口。
技术实现思路
1、本发明的任务在于,减少从现有技术已知的缺点。特别地,本发明的任务在于,提出一种用于确定在车辆的车辆环境中至少一个自由空间的方法,所述方法特别容易和可靠且相比于已知的方法显著减少所需的数据量。
2、上述任务通过权利要求的技术方案来解决,特别是通过根据权利要求1的用于确定在车辆的车辆环境中至少一个自由空间的方法、根据权利要求12的计算机程序产品、根据权利要求13的控制装置、根据权利要求14的驾驶员辅助系统以及根据权利要求15的车辆来解决。本发明的其他优点和细节从从属权利要求、说明书以及附图中产生。在此,结合按照本发明的方法所公开的特征和细节当然也适用于结合按照本发明的计算机程序产品、按照本发明的控制装置、按照本发明的驾驶员辅助系统以及按照本发明的车辆所公开的特征和细节以及分别反之亦然,从而关于对于各个发明方面的公开内容总是相互涉及或者说可以相互涉及。
3、按照第一方面,本发明通过一种用于确定在车辆的车辆环境中的至少一个自由空间的方法来解决所述任务,其中,所述方法具有如下步骤:
4、(a)接收在车辆环境中的对象的至少二维的轮廓点;
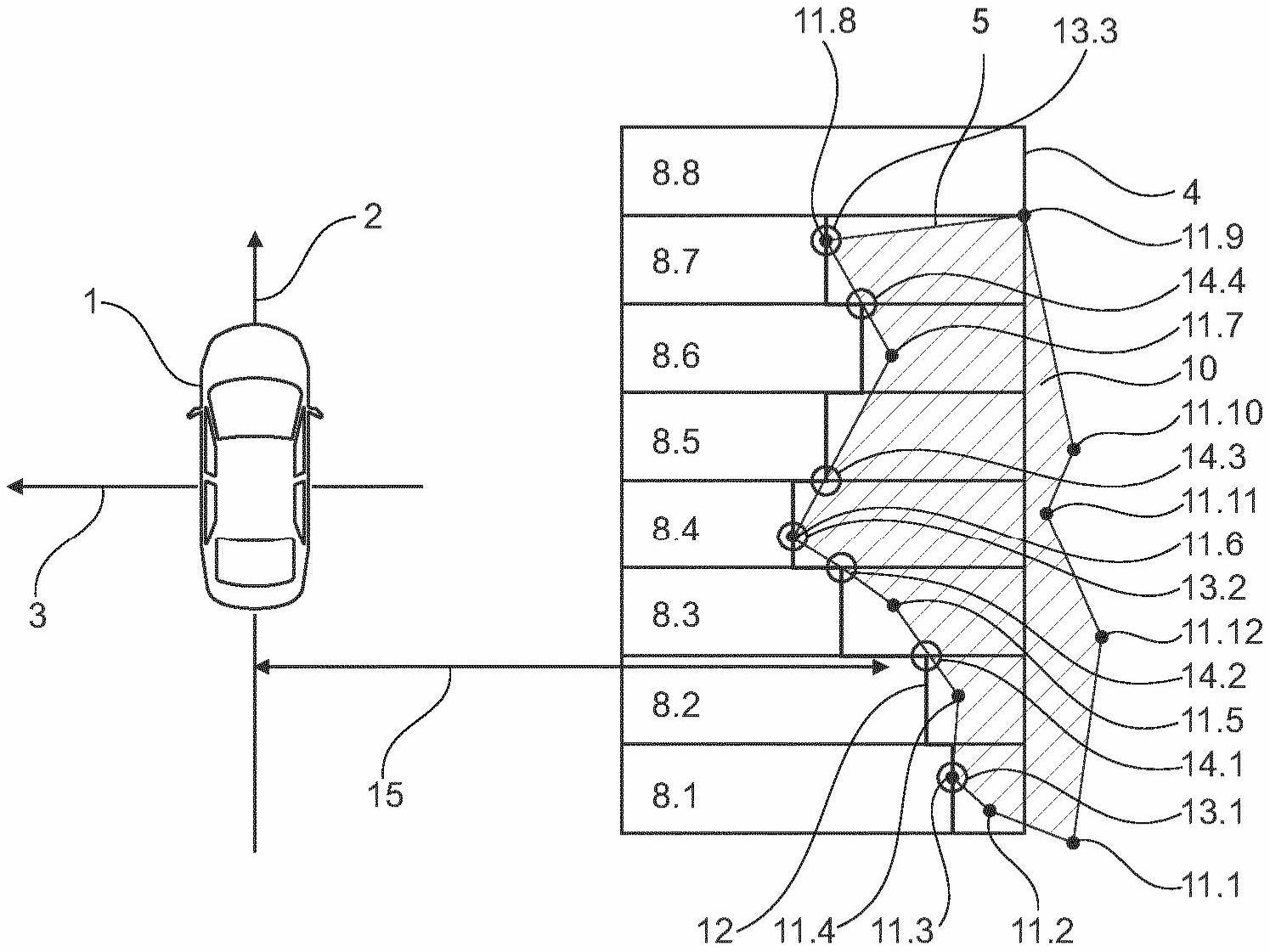
5、(b)将接收到的轮廓点分配给多个行,所述行对位于所述车辆环境中且在所述方法的范围中所考虑的至少一个视场按行来进行划分;
6、(c)对于所述多个行中的至少一部分,分别在一行内求取这样的轮廓点作为最小轮廓点,所述轮廓点在相应的行内在所有分配给该行的轮廓点中具有与车辆的参考系的最小的轮廓点距离;且
7、(d)在所考虑的所述至少一个视场内将之前求取的最小轮廓点连接为一个自由空间或多个自由空间。
8、相应地,本发明提供一种用于减少在车辆的控制装置或驾驶员辅助系统内在整个信号处理链中的数据的方法(以及根据本发明的第二方面一种计算机程序产品)。这始终降低了运算耗费和存储空间需求。此外,在某种意义上(gleichsam)可以特别容易地从该经减少的数据量来确定至少一个自由空间或多个自由空间。按照本发明实现的另一重要优点在于,自由空间描述的固定的(位置)分辨率。
9、所述方法原则上可以在二维平面中执行,其中,按照方法步骤(a)接收在车辆环境中的对象的二维的轮廓点,且按照方法步骤(b)至(d)处理这些轮廓点。但是不言而喻也可能的是,在多个二维平面中或在三维空间中执行所述方法。在此,可以在方法步骤(a)中接收在车辆环境中的对象的三维的轮廓点。在车辆环境中的对象的三维的轮廓点于是可以按照方法步骤(b)至(d)被处理,其中,这可以分别针对多个二维平面中的每个二维平面或总体上针对整个三维空间来实现。如随后根据不同的驾驶员辅助系统或所述方法的应用领域所阐明的那样,可以有意义的是,针对不同驾驶员辅助系统或应用领域考虑不同的二维平面或的不同高度的平面,且因此(采集并)接收用于不同平面或高度的至少二维的轮廓点。
10、相应地可以将自由空间确定为二维或三维自由空间。所述自由空间可以由车辆或本车辆的所连接的最小轮廓点来界定或确定。本车辆理解为如下车辆,在所述车辆中或者由所述车辆执行所述方法或者使用驾驶员辅助系统。自由空间那么可以限定为在所考虑的视场内在车辆环境内(对于所有方向)在本车辆与最近的(一个或多个)静态对象之间的空间。换言之,可以将自由空间表示为在所考虑的视场中在本车辆与所有周围的静态对象之间的(可行驶的)空间。
11、所考虑的视场可以预先关于该视场在车辆环境中的位置、该视场的朝向和/或该视场的大小方面被确定,或者所述所考虑的视场可以根据驾驶员辅助系统或所述方法的相应的应用领域而被单独地选择。这样,对于所述方法的不同的应用领域,视场可以结果不同,从而在针对不同应用领域实施的方法的范围中可以考虑不同的视场。在此,视场可以限定为二维或三维视场。将视场划分为多个行可以预先被确定或者同样根据应用领域被限定。这样,可以确定视场的不同分辨率,其中,针对视场的划分选择更多或更少的行。在较小数量的行或者在给定行数量的情况下各个行的相应更大的行高度的情况下,分辨率降低,由此可以进一步降低数据量。在此,分辨率可以如此选择,使得所述分辨率对于应用领域或相应的驾驶员辅助系统(恰好)足够。原则上,不限制所考虑的视场的数量。视场不仅可以布置为成直角,也可以布置为相对于车辆旋转。
12、可以规定,所述至少一个视场构成为矩形或(部分)圆形的。这样,也可以预限定视场的形状或几何结构,或者可以专门针对所述方法的相应的应用领域或者(本)车辆的相应的驾驶员辅助系统来对所述视场的形状或几何结构进行选择。在视场的圆形几何结构的情况下,各视场是圆形的。在视场的部分圆形的部分几何结构的情况下,多个所考虑的视场可以一起包围一个圆形或者覆盖圆形的车辆环境。在此,特别是可以涉及环形的车辆环境,该环形的车辆环境可以以如下方式被监控。在此,本车辆位于环内,且车辆环境的所监控的环由各视场形成。
13、在视场的多个行中的至少一部分行或者所有行的各行内的如下轮廓点被求取为最小轮廓点,其中,所述轮廓点在它们已经被分配的行内具有从轮廓点到车辆的参考系的最小的轮廓点距离。换言之,对于在一行内的所有轮廓点分别求取这样的最小轮廓点,所述最小轮廓点具有到参考系的最小距离或轮廓点距离。这对于多个行中的至少一部分行或者多个行中的所有行来实施或重复。由此,获得在多个行中的一部分行内的最小轮廓点。其余已接收到的轮廓点可以对于如下的方法不予考虑,特别是(从已存储这些轮廓点的存储器中)将这些轮廓点删除以便减小数据量。根据最小轮廓点距离仅对于多个行中的一部分行求取最小轮廓点,这于是例如可以是如下情况,即,没有轮廓点被分配给各个行。于是,这特别是可以在如下情况下出现,即,所考虑的视场的分辨率已被选择为非常高或者大量行划分所述视场。
14、在所考虑的所述至少一个视场内将先前求取的最小轮廓点连接为一个自由空间或多个自由空间可以通过连接相应的行的最近的最小轮廓点来确定,亦即通过在各最小轮廓点之间倾斜的连接线来实现,或者(如果这应非常节省存储器和节省运算时间)通过行间隔的简单的联结来实现(那么产生阶梯图案(参见图6))。
15、特别地,所述方法可以是计算机实现的方法。作为这样的方法所述方法可以由一个或多个计算机执行。作为计算机也被理解为控制装置、特别是车辆的控制装置,或者被理解为控制装置包括计算机。计算机也可以称为运算单元。
16、无论如何对各方法步骤进行编号以用于将各步骤彼此区分,不是强制必要的是:各方法步骤必须以提出的顺序执行。仍然可以规定:以提出的顺序(a)至(d)实施所述方法的各方法步骤。
17、此外可以规定,参考系由参考系的至少一个参考点或多个参考点形成。特别地可以规定,参考系是车辆的车辆纵轴线和/或车辆横轴线。在此,可以求取这样的轮廓点作为最小轮廓点,所述轮廓点与两个轴中的一个轴(亦即车辆纵轴线或车辆横轴线)具有最小的轮廓点距离。在此,那么轮廓点距离不被确定为例如在相应的轴上与先前所确定的参考点的距离。相反,对于每个轮廓点的轮廓点距离的参考点是不同的,以便获得根据从相应的轴或者向相应的轴的间隔归一化的轮廓点距离。这允许容易且准确地求取最小轮廓点。
18、此外可以规定,所述方法还包括借助于车辆的车辆传感器采集在车辆环境中的对象的轮廓点的步骤。这可以借助于驾驶员辅助系统或车辆的一个或多个车辆传感器来实现。例如可能的是,采用超声波传感器、相机传感器、激光扫描仪和/或雷达传感器作为车辆传感器。由此,可以高精度地采集轮廓点,以便随后完全或选择性地将所述轮廓点传输且最终按照所述方法的步骤(a)将所述轮廓点接收。
19、此外可以规定,在所述方法中考虑位于车辆环境中的至少两个视场,且对于所述至少两个视场中的至少两个视场实施方法步骤(c)和(d)。通过考虑两个不同的视场可以考虑更大的车辆环境。例如考虑两个处于相互平行的、在车辆侧面的视场可以用于实施行车道识别,这可以是所述方法或相应的驾驶员辅助系统的应用领域。
20、也可以规定,在所述方法中考虑位于车辆环境中的四个视场,这些视场共同描绘完全包围车辆的车辆环境;且对于所述四个视场中的至少两个视场或所有视场实施方法步骤(c)和(d)。在这方面,当然可以监控整个车辆环境。根据所述方法的应用领域或车辆的驾驶员辅助系统于是可以按照方法步骤(c)和(d)仅分析处理所需要的视场,以便求取分别对于应用领域或驾驶员辅助系统必要的自由空间。
21、还可以规定,对于在驾驶员辅助系统中不同应用,分别确定至少两个视场中的至少一个应用视场,所述应用视场对于所述应用是相关的,其中,在所述方法中考虑所述至少一个应用视场且对于所述至少两个视场中的所述至少一个应用视场来实施方法步骤(c)和(d)。换言之,可以根据所述方法的应用领域或驾驶员辅助系统来选择考虑一个或两个或更多个视场,如先前所述。如果在多个可能的视场中仅仅考虑这样的(应用)视场,所述视场对于所述方法的当前应用领域或车辆相应的驾驶员辅助系统是需要的,那么在某种程度上可以减少数据量。例如,如果所述方法的应用领域是车辆或者说本车辆的自动化侧面停车,或者驾驶员辅助系统是自动侧面停车系统,那么通常足够的是:考虑位于车辆之后的应用视场、位于车辆之前的应用视场以及位于车辆侧面的应用视场。在可能的位于车辆之前的(非应用)视场和另一位于车辆侧面的(非应用)视场内的非必要的轮廓点对于该应用领域或驾驶员辅助系统不必须或者至少非强制或完全地被采集或者至少不必须被接收或处理,以便可以在车辆与对象没有物理接触的情况下实施到所确定的自由空间中的安全的自动化侧面停车。于是,因为没有确定在对于所述应用领域或驾驶员辅助系统不重要的视场或车辆环境的各部分中的自由空间,所以减少数据量。
22、特别地可以规定,根据所述至少一个自由空间来求取空闲停车位。为此,可以实现在所确定的至少一个自由空间与空闲停车位的对于停车所需要的大小(以及几何结构)之间的比较。如果所述所确定的至少一个自由空间包含空闲停车位或者说该空闲停车位的大小(以及几何结构)或能实现停车,那么可以求取空闲停车位。相应地,所求取的空闲停车位可以在用于自动化停车的所述方法的应用领域或驾驶员辅助系统中使用,以便使(本)车辆安全停放在其中。
23、求取空闲停车位仍然仅是按照本发明的方法的一个可能的应用领域。所确定的自由空间也可以用于其他应用领域或驾驶员辅助系统(如(各个级别的)自主行驶、路边石识别)以及用于在说明书的范围中的其他所述内容。
24、此外可以规定,对于没有所分配的轮廓点的行,确定最接近的相邻的各行的轮廓点,所述轮廓点借助于连接线而相互连接,从而将在连接线上、在没有所分配的轮廓点的各行内具有最小的轮廓点距离的点求取为最小轮廓点。在连接线上的这一点通常位于相应的各行的两个行线中的一个行线上,所述行线将各行与相邻的各行分开。那么所述点也可以被考虑为线与行线中的一个行线的交点。因此,能实现在没有所分配的轮廓点的行中近似确定最小轮廓点。如先前已经所述,当分辨率非常小时,这可以是有益的。
25、此外可以规定,在如下情况下,即,分配给一个行的轮廓点与相邻的行的轮廓点的连接线在该行内具有一个如下点,所述点具有比分配给该行的轮廓点更小的轮廓点距离,那么将在连接线上具有较小的轮廓点距离的点求取为最小轮廓点。这特别是在小的分辨率和/或在行内少量轮廓点的情况下能实现:由于对最小轮廓点的错误的确定,为了有利于准确识别而缩小所求取的自由空间。换言之,连接线作为比较参量用于如下:在各行内的轮廓点实际上是否表示最小轮廓点,或者连接线与这些行的两个行线中的一个行线的交点实际上说明更可能的或至少关于准确的识别方面更可靠的最小轮廓点。
26、此外可以规定,根据至少一个行驶参数(特别是速度)来确定所考虑的视场的所述多个行的行高度和/或所考虑的所述至少一个视场在车辆环境内的位置。在此,当然也可以改变多个行的数量。这能实现通过使视场适配于至少一个行驶参数(如速度)来改善所述方法。由此,可以根据由所述至少一个行驶参数指示的要求来减小或增大数据量。不言而喻也可能的是,根据所述至少一个行驶参数,总体上、亦即例如借助于行宽度和/或行的数量的选择,确定视场的大小。
27、此外可以规定,所考虑的视场的多个行中的不同的行被确定为具有不同的行高度。这能实现在所考虑的视场的关键的区域中局部改善分辨率。在所考虑的视场的非关键的区域中又可以减小分辨率,以便减小数据量。
28、按照本发明的第二方面,开头提及的任务通过一种计算机程序产品解决,所述计算机程序产品包括指令,所述指令在由计算机执行所述计算机程序产品时促使所述计算机执行根据本发明的第一方面的方法。
29、在此,作为计算机特别地也被理解为车辆的控制装置或者至少被理解为:这样的控制装置包括计算机,所述计算机也可以称为运算单元。
30、按照本发明的第三方面,开头提及的任务通过一种用于车辆的控制装置解决,其中,所述控制装置设立为用于实施根据本发明的第一方面的方法。
31、控制装置可以具有计算机或运算单元。此外,控制装置可以具有存储介质。在所述存储介质上可以存储按照本发明的第二方面的计算机程序产品。由所述控制装置的计算机最终可以执行在计算机程序产品中包括的指令,以便执行根据本发明的第一方面的方法。
32、按照本发明的第四方面,开头提及的任务通过一种驾驶员辅助系统解决,所述驾驶员辅助系统具有根据本发明的第三方面的控制装置和用于采集在车辆环境中的对象的轮廓点的车辆传感器。
33、车辆传感器可以相应地设立为向控制装置传输所采集的轮廓点,所述控制装置那么又接收所述轮廓点。特别地,驾驶员辅助系统可以具有多个用于采集在车辆环境中的对象的轮廓点的车辆传感器。这些车辆传感器可以是相同类型或不同类型。例如可能的是,车辆传感器是超声波传感器、相机传感器、激光扫描仪和/或雷达传感器。
34、按照本发明的第五方面,开头提及的任务通过一种车辆解决,所述车辆具有根据本发明的第四方面的驾驶员辅助系统。
35、不言而喻,驾驶员辅助系统可以提供不同的应用领域或辅助功能(如自动化停车或电子车距识别),或者车辆可以包括用于不同应用领域的多个驾驶员辅助系统。在不同的驾驶员辅助系统的情况下,这些驾驶员辅助系统可以具有共同的控制装置或不同的控制装置,所述控制装置按照本发明的第三方面而设立。此外可以规定,各驾驶员辅助系统可以访问相同的车辆传感器或者包含这些车辆传感器。
36、其他改善本发明的措施从随后关于本发明的在附图中示意性地示出的不同实施例的描述中产生。由权利要求、说明书或附图得知的全部特征和/或优点(包括构造细节和空间布置),可以不仅单独地而且以不同组合地对于本发明是本质的。
- 还没有人留言评论。精彩留言会获得点赞!