用于高级驾驶员辅助系统的基于地形的洞察的系统和方法与流程
所公开的实施方式涉及用于车辆中高级驾驶员辅助系统的基于地形的洞察的系统和相关的使用方法。
背景技术:
1、诸如例如高级驾驶员辅助系统、主动悬架系统和/或自主或半自主驾驶的高级车辆特征可以依赖于车辆的高度准确定位。基于例如全球导航卫星系统(gnss)的定位系统可能不能为这样的特征提供足够的准确度或分辨率。
技术实现思路
1、根据一个方面,本公开内容提供了一种用于向车辆的基于地形的高级驾驶员辅助系统提供基于地形的洞察的方法。方法包括获得车辆正在行驶的路段的道路纵断面(roadprofile),至少部分地基于道路纵断面确定车辆的位置,以及至少部分地基于车辆的位置确定一个或更多个车辆系统的一个或更多个操作参数。
2、在一些实现方式中,方法还包括将一个或更多个操作参数传输至车辆。在一些实例中,方法还包括至少部分地基于一个或更多个操作参数来操作一个或更多个车辆系统。在一些实例中,方法还包括至少部分地基于一个或更多个操作参数来操作高级驾驶员辅助系统。在一些实例中,操作高级驾驶员辅助系统包括向车辆的驾驶员发起警报。在一些实例中,警报包括视觉警报、听觉警报、触觉或触感警报中的至少一种警报。在一些实例中,操作高级驾驶员辅助系统包括向车辆的自主或半自主驾驶控制器发起警报。
3、根据另一方面,本公开内容提供了一种用于向车辆的智能速度自适应系统提供基于地形的洞察的方法。方法包括获得车辆正在行驶的路段的道路纵断面,至少部分地基于道路纵断面确定车辆的位置,以及至少部分地基于车辆的位置确定一个或更多个推荐的行驶速度。
4、在一些实现方式中,方法还包括将一个或更多个推荐的行驶速度传输至车辆。在一些实例中,方法还包括至少部分地基于一个或更多个推荐的行驶速度来操作智能速度自适应系统。在一些实例中,操作智能速度自适应系统包括向车辆的驾驶员发起警报。在一些实例中,警报包括视觉警报、听觉警报、触觉或触感警报中的至少一种警报。在一些实例中,警报是视觉警报,并被呈现在车辆的显示器上。在一些实例中,操作智能速度自适应系统包括向车辆的自主或半自主驾驶控制器发起警报。
5、在一些实现方式中,推荐的行驶速度至少部分地基于车辆正在行驶的路段的即将到来的部分的道路信息。在一些实例中,路段的即将到来的部分的道路信息包括天气信息。在一些实例中,天气信息包括车辆的位置处的环境温度。在一些实例中,天气信息包括车辆的位置处的降水信息。在一些实例中,天气信息包括车辆的位置处的雾信息。
6、在一些实现方式中,道路纵断面信息包括道路坡度信息、道路粗糙度信息、道路频率内容、道路摩擦信息、道路曲率或道路抓地力信息中的至少一种。
7、在一些实现方式中,路段的即将到来的部分的道路信息包括道路事件信息。在一些实例中,道路事件信息包括坑洼或减速带中的至少一个的位置。在一些实例中,道路事件信息基于已经按车辆类别归一化的道路数据。
8、在一些实现方式中,路段的即将到来的部分的道路信息包括道路特征信息,其中,道路特征是桥梁。
9、在一些实现方式中,其中,推荐的行驶速度至少部分地基于车辆穿过路段的平均行驶速度。
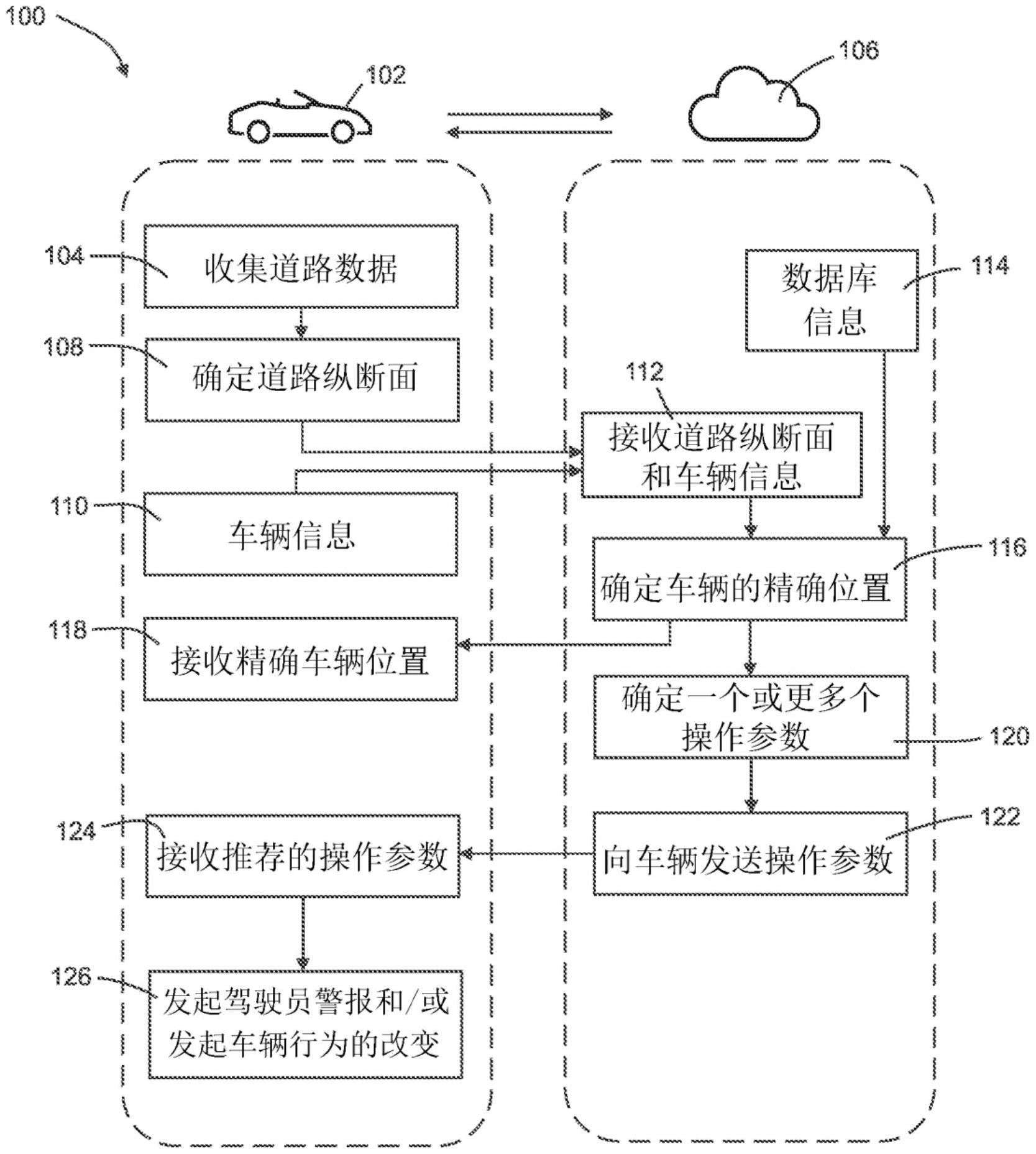
10、根据另一方面,本公开内容提供了一种用于向车辆提供推荐的行驶速度的方法。方法包括通过车辆的一个或更多个传感器获得车辆正在行驶的路段的道路数据,基于道路数据确定路段的当前道路纵断面,向云数据库发送当前道路纵断面,从云数据库接收候选存储的道路纵断面集合,通过处理器基于候选存储的道路纵断面集合和当前道路纵断面确定车辆的位置,通过处理器确定推荐的行驶速度,推荐的行驶速度至少部分基于车辆的位置,以及经由车辆的高级驾驶员辅助系统向驾驶员发起警报以改变车辆的行驶速度。
11、在一些实现方式中,警报包括视觉警报、听觉警报或触感警报中的至少一种警报。在一些实例中,警报是视觉警报,并被呈现在车辆的显示器上。
12、在一些实现方式中,推荐的行驶速度至少部分地基于车辆正在行驶的路段的即将到来的部分的道路信息。在一些实例中,路段的即将到来的部分的道路信息包括天气信息。在一些实例中,路段的即将到来的部分的道路信息包括道路纵断面信息。在一些实例中,道路纵断面信息包括道路坡度信息、道路粗糙度信息、道路频率内容、道路摩擦信息、道路曲率或道路抓地力信息中的至少一种。在一些实例中,路段的即将到来的部分的道路信息包括道路事件信息。在一些实例中,道路事件信息包括坑洼或减速带中的至少一个的位置。在一些实例中,道路事件信息基于已经按车辆类别归一化的道路数据。在一些实例中,路段的即将到来的部分的道路信息包括道路特征信息,其中,道路特征是桥梁。
13、在一些实现方式中,推荐的行驶速度至少部分地基于车辆穿过路段的平均行驶速度。
14、根据另一方面,本公开内容提供了一种用于向车辆的自动紧急制动系统提供基于地形的洞察的方法。方法包括获得车辆正在行驶的路段的道路纵断面,至少部分地基于道路纵断面确定车辆的位置,以及至少部分地基于车辆的位置确定一个或更多个自动紧急制动触发点距离。
15、在一些实现方式中,方法还包括将一个或更多个自动紧急制动触发点距离传输至车辆。在一些实例中,方法还包括至少部分地基于所传输的一个或更多个自动紧急制动触发点距离来操作自动紧急制动系统。
16、根据另一方面,本公开内容提供了一种用于确定车辆的自动紧急制动触发点距离的方法。方法包括通过车辆的一个或更多个传感器获得车辆正在行驶的路段的道路数据,基于道路数据确定路段的当前道路纵断面,向云数据库发送当前道路纵断面,从云数据库接收候选存储的道路纵断面集合,通过处理器基于候选存储的道路纵断面集合和当前道路纵断面确定车辆的位置,通过处理器确定自动紧急制动触发点距离,自动紧急制动触发点距离至少部分地基于车辆的位置,以及当车辆距另一车辆或对象在自动紧急制动触发点距离内时,经由车辆的高级驾驶员辅助系统向驾驶员发起警报以进行制动。
17、在一些实现方式中,方法还包括:当车辆在自动紧急制动触发点距离内时,经由车辆的高级驾驶员辅助系统发起制动命令,该制动命令被配置成发起车辆的制动。
18、在一些实现方式中,方法还包括:当车辆在小于自动紧急制动触发点距离的第二距离内时,经由车辆的高级驾驶员辅助系统发起制动命令,该制动命令被配置成发起车辆的制动。
19、在一些实现方式中,警报包括视觉警报、听觉警报或触感警报中的至少一种警报。在一些实例中,警报是视觉警报,并被呈现在车辆的显示器上。在一些实例中,自动紧急制动触发点距离至少部分地基于车辆正在行驶的路段的即将到来的部分的道路信息。在一些实例中,路段的即将到来的部分的道路信息包括天气信息。在一些实例中,路段的即将到来的部分的道路信息包括道路纵断面信息。在一些实例中,道路纵断面信息包括道路坡度信息、道路粗糙度信息、道路频率内容、道路摩擦信息、道路曲率或道路抓地力信息中的至少一种。在一些实例中,路段的即将到来的部分的道路信息包括道路事件信息。在一些实例中,道路事件信息包括坑洼或减速带中的至少一个的位置。在一些实例中,道路事件信息基于已经按车辆类别归一化的道路数据。在一些实例中,路段的即将到来的部分的道路信息包括道路特征信息,其中,道路特征是桥梁。
20、根据另一方面,本公开内容提供了一种用于向车辆的自适应巡航控制系统提供基于地形的洞察的方法。方法包括获得车辆正在行驶的路段的道路纵断面,至少部分地基于道路纵断面确定车辆的位置,以及至少部分地基于车辆的位置确定一个或更多个跟随距离。
21、在一些实现方式中,方法还包括将一个或更多个跟随距离传输至车辆。
22、在一些实现方式中,方法还包括至少部分地基于所传输的一个或更多个跟随距离来操作自适应巡航控制系统。
23、根据另一方面,本公开内容提供了一种用于确定用于车辆的自适应巡航控制系统的跟随距离的方法。方法包括通过车辆的一个或更多个传感器获得车辆正在行驶的路段的道路数据,基于道路数据确定路段的当前道路纵断面,向云数据库发送当前道路纵断面,从云数据库接收候选存储的道路纵断面集合,通过处理器基于候选存储的道路纵断面集合和当前道路纵断面确定车辆的位置,以及通过处理器确定跟随距离,跟随距离至少部分地基于车辆的位置。
24、在一些实现方式中,方法还包括:当车辆在跟随距离内时,发起制动命令,该制动命令被配置成发起车辆的制动。
25、在一些实现方式中,方法还包括:当车辆在跟随距离内时,发起命令,该命令被配置成调整自适应巡航控制的设定速度。
26、在一些实现方式中,方法还包括向车辆的驾驶员发起警报,其中,警报包括视觉警报、听觉警报或触感警报中的至少一种警报。在一些实例中,警报是视觉警报,并被呈现在车辆的显示器上。
27、在一些实现方式中,跟随距离至少部分地基于车辆正在行驶的路段的即将到来的部分的道路信息。在一些实例中,路段的即将到来的部分的道路信息包括天气信息。在一些实例中,路段的即将到来的部分的道路信息包括道路纵断面信息。在一些实例中,道路纵断面信息包括道路坡度信息、道路粗糙度信息、道路频率内容、道路摩擦信息、道路曲率或道路抓地力信息中的至少一种。在一些实例中,路段的即将到来的部分的道路信息包括道路事件信息。在一些实例中,道路事件信息包括坑洼或减速带中的至少一个的位置。在一些实例中,道路事件信息基于已经按车辆类别归一化的道路数据。在一些实例中,路段的即将到来的部分的道路信息包括道路特征信息,其中,道路特征是桥梁。
28、根据另一方面,本公开内容提供了一种调整车辆的操作模式的方法。方法包括通过车辆的一个或更多个传感器获得车辆正在行驶的路段的道路数据,基于道路数据确定路段的当前道路纵断面,向云数据库发送当前道路纵断面,从云数据库接收候选存储的道路纵断面集合和其他道路信息,通过处理器基于候选存储的道路纵断面集合和当前道路纵断面确定车辆的位置,通过处理器确定在路段的即将到来的部分上存在桥梁,通过处理器确定在桥梁上的路段的即将到来的部分上可能出现湿滑状况,以及通过处理器确定用于穿过桥梁的车辆的操作参数的值。
29、在一些实现方式中,车辆的操作参数是车辆的行驶速度、车辆的自适应巡航控制的跟随距离或自动紧急制动触发距离中的至少一种操作参数。
30、在一些实现方式中,其他道路信息包括桥梁的位置处的环境温度。
31、在一些实现方式中,其他道路信息包括桥梁的位置处的天气信息。在一些实例中,天气信息包括桥梁的位置处的降水信息。
32、根据另一方面,本公开内容提供了一种用于计算穿过路段的第一车辆的目标行驶路径的方法。方法包括确定第一车辆的当前位置,至少部分地基于第一车辆的当前位置获得穿过路段的目标行驶路径,以及确定第一车辆的当前位置与目标行驶路径之间的误差。
33、在一些实现方式中,方法还包括至少部分地基于所确定的误差来操作一个或更多个车辆系统。在一些实例中,一个或更多个车辆系统包括自主驾驶轨迹规划系统。在一些实例中,一个或更多个车辆系统包括车道保持辅助系统。
34、在一些实现方式中,方法还包括将误差与阈值进行比较,并确定第一车辆的当前路径适合穿过路段。
35、在一些实现方式中,方法还包括将误差与阈值进行比较,并确定第一车辆的当前路径不适合穿过路段。在一些实例中,方法还包括基于误差计算校正动作,以使当前轨迹匹配目标行驶路径。在一些实例中,方法还包括使用至少部分地影响第一车辆的转向的第一车辆的高级驾驶员辅助系统发起校正动作。在一些实例中,计算目标行驶路径包括对穿过路段的至少一个其他车辆所采取的至少一个其他路径进行平均。
36、根据另一方面,本公开内容提供了一种用于车辆的转向校正系统。转向校正系统包括定位系统,其被配置成确定车辆的位置,至少一个系统,其被配置成影响车辆的行驶方向,以及处理器,其被配置成执行以下步骤:从定位系统获得车辆的位置;至少部分地基于车辆的位置获得目标行驶路径;确定车辆的当前行驶路径;以及至少部分地基于目标行驶路径与当前行驶路径来控制至少一个系统。
37、在一些实现方式中,被配置成影响车辆行驶方向的至少一个系统是至少一个后转向致动器。在一些实例中,定位系统是准确度在0.3米以内的定位系统。在一些实例中,定位系统使用通过实时运动学定位增强的全球导航卫星系统。在一些实例中,定位系统使用由全球导航卫星系统增强的惯性导航。在一些实例中,处理器还被配置成执行发起向云计算系统传输车辆的位置的步骤。在一些实例中,处理器还被配置成执行从云计算系统接收车辆的目标路径的步骤。
38、根据另一方面,本公开内容提供了一种向车辆系统提供转向校正命令的方法。方法包括使用高准确度定位从至少两个车辆获得行驶路径,从至少两个车辆的行驶路径生成聚合路径,其中,聚合路径代表道路中的一个车道,获得使用高准确度定位系统获得的被操作车辆的当前行驶路径,将当前行驶路径与聚合路径进行比较,生成校正命令以校正运动中的车辆的当前行驶路径,以及将校正转向命令发送至转向控制器。
39、在一些实现方式中,在生成聚合路径期间,对输入行驶路径进行过滤以移除异常值和不期望的行驶路径。在一些实例中,使用通过实时运动学定位增强的全球导航卫星系统来获得来自至少两个车辆的行驶路径。在一些实例中,使用通过全球导航卫星系统增强的惯性导航来获得来自至少两个车辆的行驶路径。在一些实例中,使用通过实时运动学定位增强的全球导航卫星系统来获得当前行驶路径。在一些实例中,使用通过全球导航卫星系统增强的惯性导航来获得当前行驶路径。
40、根据另一方面,本公开内容提供了一种车辆,包括被配置成确定车辆的位置的定位系统、显示器和被配置成执行以下步骤的处理器:从定位系统获得车辆的位置;至少部分地基于车辆的位置来确定路面上的一个或更多个路面特征的存在;以及在显示器上呈现路面上的一个或更多个路面特征的位置。
41、在一些实现方式中,至少部分地基于从基于云的数据库下载的路面信息来确定位置。
42、在一些实现方式中,显示器选自平视显示器和监视器。
43、在一些实现方式中,控制器还被配置成在显示器上呈现车辆的至少一个轮胎相对于一个或更多个路面特征的投影轮胎路径。
44、在一些实现方式中,控制器还被配置成在显示器上呈现车辆的两个前轮胎的投影轮胎路径。
45、在一些实现方式中,一个或更多个路面特征包括坑洼或隆起。
46、根据另一方面,本公开内容提供了一种操作车辆的方法。方法包括:(a)当车辆沿着路面行驶时,确定路面上的路面特征的位置,路面特征的位置是相对于车辆的,以及(b)在显示器上呈现路面上的路面特征的位置。
47、在一些实现方式中,呈现路面特征的位置包括在显示器上呈现路面特征的图形表示。
48、在一些实现方式中,显示器是平视显示器。
49、在一些实现方式中,方法还包括在显示器上呈现车辆的至少一个轮胎的投影轮胎路径。在一些实例中,方法还包括基于车辆的至少一个轮胎的投影轮胎路径,调整车辆的方向盘的转向角度以避开路面特征。
50、在一些实现方式中,路面特征是坑洼。
51、根据另一方面,本公开内容提供了一种在能见度差的条件下操作车辆的方法。方法包括(a)当车辆沿着路面行驶时,使用至少一个遥感器确定至少一个其他车辆相对于路面的位置,以及(b)在显示器上呈现所确定的至少一个其他车辆相对于路面的图像的位置(a)。
52、在一些实现方式中,能见度差的条件是由雾引起的,并且至少一个遥感器是雷达探测器。
53、在一些实现方式中,显示器是平视显示器或监视器。
54、在一些实现方式中,在显示器上呈现所确定的至少一个其他车辆的位置包括在显示器上呈现至少一个其他车辆的图形表示。
55、根据另一方面,本公开内容提供了一种用于向车辆的自适应前灯系统提供基于地形的洞察的方法。方法包括获得车辆正在行驶的路段的路面信息,至少部分地基于路面信息确定车辆的位置,以及至少部分地基于车辆的位置确定一个或更多个目标照明区域。
56、在一些实现方式中,方法还包括将一个或更多个目标照明区域传输至车辆。在一些实例中,该方法还包括至少部分地基于所传输的一个或更多个目标照明区域来操作自适应前灯系统。
57、在一些实现方式中,路面信息包括道路纵断面。
58、根据另一方面,本公开内容提供了一种用于向车辆的自适应adas传感器系统提供基于地形的洞察的方法。方法包括获得车辆正在行驶的路段的路面信息,至少部分地基于路面信息确定车辆的位置,以及至少部分地基于车辆的位置确定一个或更多个目标感测区域。
59、在一些实现方式中,方法还包括将一个或更多个目标感测区域传输至车辆。在一些实例中,该方法还包括至少部分地基于所传输的一个或更多个目标感测区域来操作自适应前灯系统。
60、在一些实现方式中,其中,路面信息包括道路纵断面。
61、智能速度自适应系统基于速度限制和/或即将到来的道路信息警告或强制执行行驶速度。发明人已经认识到,针对安全、舒适和/或车辆耐久性的行驶速度建议可以通过对一个或更多个即将到来的道路状况的预见来确定。即将到来的道路状况可以包括但不限于道路事件、道路粗糙度、道路频率内容、道路摩擦、道路曲率、天气相关事件和/或平均行驶速度。通过精确定位和利用数据库的数据共享,可以计算基于对即将到来的道路状况的预见的推荐的行驶速度,并将其提供给车辆上的智能速度自适应系统。然后,智能速度自适应系统可以向车辆驾驶员警告和/或强制执行推荐的行驶速度,以提高安全性、舒适性、燃料经济性、里程和/或车辆耐久性或其他期望的指标。
62、当今车辆中的高级驾驶辅助系统(adas)增强了驾驶员控制车辆保持在车道内并避免侵占道路上相邻行驶车道的能力。这种安全功能通常依赖于基于视觉的传感器系统,如面向前方和侧面的摄像装置,来识别车道标志并确定在车道内采取的适当路径。
63、用于这种应用的传感器系统容易受到多种潜在故障的影响,包括反射或玻璃上的灰尘造成的传感器遮挡;由于诸如雨、雾、雪的环境条件导致传感器功能降低;以及可能普遍无法识别车道标志,例如由于诸如黑暗的照明问题。
64、发明人已经认识到,使用附加输入可以增强这样的车道辅助系统的功能。在一个实现方式中,使用高清地图,其包含与道路相关的细节,诸如例如地形纵断面、道路事件、道路内容和/或类似的道路表征特征;车辆周围的路标和其他独特的地标;平均、中间和/或典型航向(heading);先前驾驶的曲率和/或路径;或其任何子集,以及许多其他可能的细节。在一个实施方式中,该地图可以通过从其他车辆和/或从先前驾驶收集数据来众包(crowd-source)。接下来,可以对车辆的当前位置进行准确估计,例如使用来自高清地图的道路特征或事件的地形匹配,或者使用道路纵断面或环境中的地标的特征匹配,或者使用高精度全球导航系统信号。一旦知道了准确的位置,并且给定了由其他车辆行驶的典型路径,该信息可以用于确定当前车辆对路径的任何不期望的偏离。这些偏差可以用作驾驶员辅助特征的附加输入,例如用作冗余传感器以确认计划路径的有效性,用作回退传感器以桥接标记不足的道路的部分(诸如例如在道路一侧上的车道标记中断的交叉口处),或者用作传感器融合的附加输入以确定车辆的位置和计划路径。该系统提供的输入具有比通常使用的视觉系统长得多的时间范围,因此可以用作低频校正信号。
65、高级驾驶员辅助特征或自主驾驶轨迹规划系统可以沿着路径操纵或帮助操作者操纵车辆。这种安全特征通常依赖于基于视觉的传感器系统,如面向前方和侧面的摄像装置,或者基于距离或范围的传感器系统,如lidar或雷达,来识别车道标志并确定所采取的适当的路径,以便保持在行驶车道内。
66、用于这种应用的传感器系统可能容易受到多种潜在故障的影响,例如,车道标志被阻碍、模糊或在短路段不存在,并且可能导致辅助功能或自主驾驶规划器控制的轨迹不正确。
67、发明人已经认识到,通过使用精确定位和来自先前驾驶的一个或更多个轨迹路径来向路径规划控制器或人类操作者提供附加的误差信号,可以降低传感器故障对提供驾驶员辅助的影响。
68、对传感器故障的这种补偿可以例如通过使用基于沿着期望路径的相同车辆中的先前驾驶的信息或者基于沿着期望路径的至少一个不同车辆中的先前驾驶的信息来完成。该信息例如可以是车辆的位置与每个车辆的航向的组合。结合沿着路径的准确定位,该信息可以用于生成每个路段的参考轨迹或方向。
69、当车辆穿过参考轨迹或航向已知的路径时,并且如果车辆配备有准确定位系统和到包含参考轨迹信息的数据库的连接(该参考轨迹信息可以本地存储在车辆中,或者存储在云中并以适当的间隔通过空中连接下载至车辆),则可以提供车辆前方的参考路径。
70、将该参考路径与由基于视觉的系统确定的轨迹进行比较允许故障检测,并且如果轨迹被确定为不正确或不可信,则允许系统的校正或脱离,从而降低对车辆、其乘员或附近的其他人造成伤害的可能性。
71、现代道路车辆的前灯被配置成照亮车辆前方的道路。如果光源(即前照灯)足够强,通常照亮车辆前方更远的道路更有益。照亮车辆更前方的道路也可能产生负面影响,因为前灯也会将强光照射到迎面而来的车辆上,潜在地阻碍了这些车辆的操作者的能见度。由于这个原因,最大允许的前灯角度通常由诸如当地机动车辆部门的权威机构来规定。另一个问题发生在车辆转弯时,前灯照亮车辆正前方的道路的部分,而不是车辆将要穿过的道路的部分。
72、一些汽车制造商已经开始使用能够从左到右和/或上下改变光束角度的前灯。这可以以多种方式来完成,例如包括使用致动器系统来前灯、前灯组件、透镜或引导光束的反射器,或者通过使用多个光源,每个光源至少部分地朝向不同的方向照明并根据需要选择性地接合它们。可以至少部分地通过查看车辆的投影轨迹,或者通过使用基于地图数据的预测路径,或者通过检测道路路径变化的传感器,例如摄像装置或lidar系统,来引导期望角度的选择。选择还可以至少部分地由间接或直接测量车辆相对于道路的位置的传感器引导。
73、当在高度变化显著的道路上行驶时,前灯仅照亮车辆前方的部分道路。例如,当在车辆前方上升的道路上驾驶时,前灯照亮离车辆更近并且可能比道路平坦的情况下更小的道路的部分。当在车辆前方下降的道路上行驶时,前灯照亮车辆前方更远并且可能更大的道路的部分,但也可能以不期望的方式潜在地照亮迎面而来的车辆。即使使用上述前灯系统,该问题也不能解决,因为车辆前方的道路是未知的,并且通常不能用现有的传感器系统诸如基于视觉的系统、lidar、雷达或其他已知技术充分感测。
74、发明人已经认识到,基于地形的高级驾驶员辅助系统(基于地形的adas)可以利用车辆前方的已知道路纵断面(road profile),例如包括道路高程变化和/或道路曲率。使用以足够提前的通知将该信息提供给车辆的方法,车辆控制器可以以足够提前的通知决定请求前灯机构的致动,或者前灯照明模式的变化,以补偿致动的动态、道路的即将到来的路径以及迎面而来的车流的存在或不存在。
75、上述用于调整前灯光束的方法可以用于修改车辆中的adas传感器的功能,诸如例如lidar、雷达或基于光的传感器,诸如摄像装置,以考虑即将到来的道路障碍物或道路纵断面。如果adas传感器具有用于调整其横向和/或竖直方向性和/或灵敏度和/或范围的机构,或者具有修改其最佳功能的其他方法,诸如例如调整其聚焦范围或背景照明量或其他参数,则以类似于上述的方式,可以基于即将到来的道路纵断面来调整最佳参数。
76、例如,在一个实施方式中,lidar传感器能够检测一定距离处的对象并针对水平道路上的车辆进行校准,并且可以具有用于调整其横向和/或竖直方向性和/或灵敏度的致动机构,或者它可以具有用于基于内部设置调整其范围的机构。在存在诸如山顶或谷的道路特征的情况下,可以预先地调整角度,以正确地识别与车辆更相关的特征。另一方面,了解车辆前方的道路纵断面也可以用于向操作者或驾驶系统提供信息,例如,由于汽车前方的道路特征,传感器的检测范围预期较低,因此可能需要调整车辆速度或其他设置(例如,驾驶控制器设置)。
77、高级驾驶辅助系统(adas)可以使用车载传感器为车辆提供转向校正。这种转向校正通常通过触感反馈向操作者提示和/或由前转向致动器执行;然而,这种反馈可能是侵入式的,或者被驾驶员感知为不舒服地将车辆拉向一侧或另一侧。本文中描述的系统和方法可以通过从多个车辆路径收集驾驶数据并创建聚合路径来检测车道位置,并且使用后转向致动器基于车辆的当前路径与聚合路径之间的差异来提供非侵入式转向校正。定位方法可以用于确定行驶车道内的车辆路径。如果车辆路径偏离聚合路径,则该系统可以为转向校正系统创建命令,以影响车辆的行驶方向,转向校正系统包括一个或更多个后转向致动器。
78、在一些实现方式中,车辆可以包括显示单元和控制器,控制器被配置成在显示单元上显示路面特征的位置,其中,该位置至少部分地基于从基于云的数据库下载的路面信息来确定。显示单元可以是例如平视显示器或监视器。在一些实现方式中,控制器可以被配置成还显示车辆的至少一个轮胎相对于路面特征的投影轮胎路径。控制器还可以被配置成显示车辆的两个前轮胎的投影轮胎路径。特征可以是例如坑洼或隆起。
79、根据另一方面,本公开内容提供了一种用于操作车辆的方法,其中,方法包括:在车辆沿着路面行驶时确定路面特征相对于路面的位置。方法还可以包括在显示单元上显示路面的图像和相对于路面的所确定的位置处的路面特征的图像。在一些实现方式中,显示单元可以是例如平视显示器或监视器。此外,还可以相对于路面特征示出车辆的至少一个轮胎的投影轮胎路径。方法还可以包括调整车辆的方向盘的转向角度以避开路面特征。这种调整可以基于车辆的至少一个轮胎相对于路面特征的投影轮胎路径。在一些实现方式中,该特征可以是坑洼或隆起。
80、根据另一方面,本公开内容提供了一种用于在能见度差的条件下操作车辆的方法。方法还可以包括在车辆沿着道路行驶时,使用至少一个遥感器来确定至少一个其他车辆相对于道路的位置。方法还可以包括在显示单元上显示在所确定的位置处的所述其他车辆相对于道路图像的图像。在一些实现方式中,能见度差可能由雾引起,并且至少一个遥感器可以是雷达探测器。
- 还没有人留言评论。精彩留言会获得点赞!