一种多平台激光雷达大田玉米高通量茎叶分离方法
1.本发明涉及大田玉米高通量茎叶分离技术领域,具体为一种多平台激光雷达大田玉米高通量茎叶分离方法。
背景技术:
2.准确、高通量的提取作物表型参数是育种的关键,利用激光雷达进行精确表型参数提取的前提是茎叶分离。然而由于利用激光雷达获取到的作物点云数据的离散、不规则、无拓扑等特性以及海量数据处理的难度,玉米点云数据分割与识别仍颇具挑战,导致难以进行茎叶分离和提取表型参数。
3.已有的茎叶分离方法主要包括基于特征、基于模型和基于学习的方法。基于特征的方法通过获取点云的强度、形状和波形等特征,根据茎秆和叶片特征的不同进行茎叶分离;基于模型的方法使用多种基元对玉米进行拟合,例如使用圆柱体拟合茎秆,再结合区域增长算法进行茎叶分离;基于学习的方法通过获取局部特征值,然后建立训练样本,利用支持向量机、随机森林等机器学习算法实现茎叶分离以及采用深度学习方法自动从海量数据中提取特征进行茎叶分离。然而,现有的采用以上方法主要实现森林或者单株尺度玉米的茎叶分离,对于大田玉米的茎叶分离方法几乎没有。而大田玉米高通量茎叶分离可为准确、高通量的提取玉米表型参数提供基础,为玉米理想株型性状的筛选提供科学方法和技术支撑,因此,需要实现大田玉米高通量茎叶分离。
技术实现要素:
4.本发明的目的在于提供一种多平台激光雷达大田玉米高通量茎叶分离方法,针对目前几乎没有研究关注大田玉米茎叶分离的问题,本发明旨在实现多平台激光雷达大田玉米高通量茎叶分离,为准确、高通量的提取玉米表型参数提供基础,为玉米理想株型性状的筛选提供科学方法和技术支撑,促进玉米育种的规模化发展。
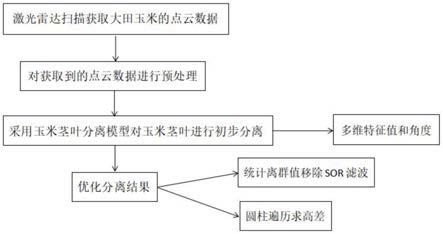
5.本发明提供了一种多平台激光雷达大田玉米高通量茎叶分离方法,其特征在于,包括如下步骤:
6.利用激光雷达扫描获取大田玉米的点云数据;
7.对获取到的所述点云数据进行预处理;
8.采用玉米茎叶分离模型对玉米茎叶进行初步分离,具体分离步骤为:
9.建立多个基准圆柱,采用多个基准圆柱对预处理后点云数据的所有点进行遍历,对基准圆柱内遍历后的点求其多维特征值和角度,根据玉米茎秆和叶片多维特征值和角度的不同,实现玉米茎叶初步分离;
10.优化分离结果,具体优化步骤为:
11.采用统计离群值移除sor滤波去除茎秆中的噪声点,将噪声点添加到叶片中;
12.采用优化圆柱去遍历分离出的茎秆,统计每个优化圆柱中最高点和最低的差值,设定一个阈值,若差值小于这个阈值,则优化圆柱内的点被从茎秆中分离出去,添加到叶片
点中;所述优化圆柱的直径小于基准圆柱的直径,其高度大于基准圆柱的高度。
13.优选的,所述对基准圆柱内遍历后的点求其多维特征值和角度,具体步骤为:
14.对处于每个所述基准圆柱内的所有点拟合平面,所述拟合平面到所述基准圆柱内的所有点的距离之和最小,求取所述拟合平面的多维特征值和角度。
15.优选的,所述拟合平面的约束条件为:
16.a2+b2+c2=1
17.所述拟合平面方程为
18.ax+by+cz=d
19.所述基准圆柱中的所有点的三维坐标为(xi,yi,zi),i=1,2,3...n;
20.将所述基准圆柱中的所有点的三维坐标带入到所述拟合平面方程,得到
21.axi+byi+czi=d,i=1,2,3...n
ꢀꢀꢀ
(1)
22.设所述基准圆柱中的所有点的平均坐标为并带入到所述拟合平面方程,得到
[0023][0024]
将(1)式与(2)式相减,得到
[0025][0026]
设矩阵
[0027][0028]
列矩阵
[0029][0030]
则式(3)等价于ax=0,
[0031]
对矩阵a进行奇异值分解可获取所述拟合平面的特征值和特征向量,即所述拟合平面的多维特征值和角度。
[0032]
优选的,所述激光雷达获取大田玉米的点云数据的方法包括地基激光雷达获取大田玉米的点云数据及背包激光雷达获取大田玉米的点云数据;
[0033]
所述地基激光雷达获取大田玉米的点云数据包括针对不同生育期的玉米,设置不同的激光雷达的扫描参数,通过多站点的扫描方式获取大田玉米的点云数据;
[0034]
所述背包激光雷达获取大田玉米的点云数据包括根据实际大田环境规划扫描路线,在扫描之前和扫描之后分别采用绕八字的方式消除惯导误差。
[0035]
优选的,所述对获取到的点云数据进行预处理包括:
[0036]
对地基激光雷达获取的点云数据的解算和拼接,及对背包激光雷达获取的点云数据的解算;
[0037]
对点云数据的去噪,地面点云数据的滤波,以及对获取的大田玉米的点云数据进行小区分割。
[0038]
优选的,所述激光雷达的扫描参数包括扫描分辨率/质量、水平扫描角度、垂直扫描角度。
[0039]
与现有技术相比,本发明的有益效果:
[0040]
本发明提出的一种多平台激光雷达大田玉米高通量茎叶分离方法,利用地基激光雷达和背包激光雷达平台获取的大田玉米的点云数据,采用玉米茎叶分离模型对玉米茎叶进行初步分离,采用统计离群值移除sor(statistical outlier removal),滤波和圆柱遍历求高差的方法优化分离结果。本发明实现了对大田玉米的茎叶分离,为准确、高通量的提取玉米表型参数提供基础,为玉米理想株型性状的筛选提供科学方法和技术支撑,对加速玉米育种进程具有重要意义。
[0041]
随着lidar传感器价格的不断降低,该方法可低成本、高效、精准的服务于玉米育种,为育种专家快速获取大田玉米表型信息,进而基于表型信息进行基因关联分析,加速玉米育种进程,提升育种效率和水平,具有良好的应用前景和巨大的市场价值。
附图说明
[0042]
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
[0043]
图1是本发明的流程框图;
[0044]
图2是本发明中的玉米叶片和茎秆的多维特征值示意图;
[0045]
图3是本发明中的玉米叶片和茎秆的角度示意图;
[0046]
图4是本发明实施例中的种植密度为45000株/公顷,不同品种玉米的茎叶分离结果图;
[0047]
图5是本发明实施例中的不同种植密度、不同生育期和不同平台玉米茎叶分离结果图。
具体实施方式
[0048]
下面结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整的描述,但应当理解本发明的保护范围并不受具体实施方式的限制。
[0049]
实施例
[0050]
如图1-5所示,一种多平台激光雷达大田玉米高通量茎叶分离方法,包括如下步骤:
[0051]
步骤1、利用激光雷达扫描获取大田玉米的点云数据,激光雷达获取大田玉米的点云数据的方法包括地基激光雷达获取大田玉米的点云数据及背包激光雷达获取大田玉米的点云数据;地基激光雷达获取大田玉米的点云数据包括针对不同生育期的玉米,设置不同的激光雷达的扫描参数;激光雷达的扫描参数包括扫描分辨率/质量、水平扫描角度、垂直扫描角度。通过多站点的扫描方式获取大田玉米的点云数据,背包激光雷达获取大田玉米的点云数据包括根据实际大田环境规划扫描路线,在扫描之前和扫描之后分别采用绕八字的方式消除惯导误差。在采集点云数据时,尽可能保持水平、匀速前行。
[0052]
步骤2、对获取到的点云数据进行预处理,对获取到的点云数据进行预处理包括:对地基激光雷达获取的点云数据的解算和拼接,及对背包激光雷达获取的点云数据的解
算,对点云数据的去噪,地面点云数据的滤波,以及对获取的大田玉米的点云数据进行小区分割。
[0053]
步骤3、采用玉米茎叶分离模型对玉米茎叶进行初步分离,具体分离步骤为:
[0054]
步骤3.1、建立多个基准圆柱;
[0055]
步骤3.2、采用多个基准圆柱对预处理后点云数据的所有点进行遍历;
[0056]
步骤3.3、对基准圆柱内遍历后的点求其多维特征值和角度,包括:
[0057]
步骤3.3.1、对处于每个基准圆柱内的所有点拟合平面,拟合平面到基准圆柱内的所有点的距离之和最小,求取拟合平面的多维特征值和角度;
[0058]
拟合平面的约束条件为:
[0059]
a2+b2+c2=1
[0060]
拟合平面方程为:
[0061]
ax+by+cz=d
[0062]
基准圆柱中的所有点的三维坐标为(xi,yi,zi),i=1,2,3...n;
[0063]
步骤3.3.2、将基准圆柱中的所有点的三维坐标带入到拟合平面方程,得到:
[0064]
axi+byi+czi=d,i=1,2,3...n
ꢀꢀꢀ
(1)
[0065]
步骤3.3.3、设基准圆柱中的所有点的平均坐标为并带入到拟合平面方程,得到:
[0066][0067]
将(1)式与(2)式相减,得到:
[0068][0069]
步骤3.3.4、设矩阵:
[0070][0071]
列矩阵
[0072][0073]
则式(3)等价于ax=0,
[0074]
步骤3.3.5、对矩阵a进行奇异值分解可获取拟合平面的特征值和特征向量,即拟合平面的多维特征值和角度。
[0075]
步骤3.4、根据玉米茎秆和叶片多维特征值和角度的不同,实现玉米茎叶初步分离。
[0076]
步骤4、优化分离结果;
[0077]
初步茎叶分离的结果存在两个问题,极少数叶片点,如叶梢和比较窄的叶片点被分到茎秆中,叶片与茎秆交叉部位存在一些未准确分割的点。则需要优化分离结果,具体优化步骤为:
[0078]
步骤4.1、采用统计离群值移除sor滤波去除茎秆中的噪声点,将噪声点添加到叶
片中;
[0079]
步骤4.2、采用优化圆柱去遍历分离出的茎秆,统计每个优化圆柱中最高点和最低的差值,设定一个阈值,若差值小于这个阈值,则优化圆柱内的点被从茎秆中分离出去,添加到叶片点中;优化圆柱的直径小于基准圆柱的直径,其高度大于基准圆柱的高度。
[0080]
本发明通过分析玉米茎秆和叶片的结构特征,根据其结构特征的不同来进行茎叶分离,分别为:
[0081]
特征值,玉米的茎秆局部点类似一维分布,即线,而叶片局部点类似二维分布,即面,可利用这个特征对玉米进行茎叶分离;
[0082]
角度,根据茎秆与竖直方向的夹角很小或者几乎为零,而叶片与竖直方向有一定的夹角。
[0083]
由于叶片的叶梢比较窄和茎秆类似,所以只使用特征值无法很好的分离玉米茎秆和叶片,而角度特征能很好的弥补这一问题,但是大部分品种玉米上部叶片竖直向上生长,与竖直方向的夹角较小,和茎秆具有同样的特征,故只采用角度无法分开上部的叶片。将这两个参数相结合,弥补了单一参数存在的问题,可以更高精度的对玉米进行茎叶分离。
[0084]
对玉米茎叶分离模型进行机器检验训练包括,:
[0085]
选取实验大田70%的玉米,将茎秆标记为0,叶片标记为1,分别计算实验大田70%的玉米的茎秆和叶片的多维特征值和角度,实现实验大田70%的玉米茎叶分离;
[0086]
计算实验大田剩余的30%玉米的茎秆和叶片的多维特征值和角度;
[0087]
将实验大田70%的玉米作为训练样本,将实验大田剩余的30%玉米作为预测样本,利用随机森林模型,依据训练样本对预测样本进行预测,实现预测样本玉米的初步茎叶分离,将实际计算的实验大田剩余的30%玉米的茎秆和叶片的多维特征值和角度与预测结果进行检验对比。
[0088]
本发明中的实例的大田玉米位于北京市昌平区小汤山国家精准农业示范基地,地理位置115
°
50
′
17
″
~116
°
29
′
49
″
e,40
°
20
′
18
″
~40
°
23
′
13
″
n。该农业示范基地包含15个育种小区,其中5个品种,每个品种中3个重复。每个小区大小均为3.6m
×
2.5m,小区间隔1.5m。该区域种植密度为40000株/公顷,5个品种分别为郑单958、先玉335、京农科728、成单30、京品6,并分别标记为a1、a2、a3、a4、a5。
[0089]
地基激光雷达数据于2019年9月12日获取,获取数据之前,在试验区内均匀布设6个控制点,本实例为1m见方的箱子,用于不同扫描站数据的配准。采用4个小区布设5站,四个角各一站和中间一站的方法,共布设15站。地基激光雷达为faro focuss 350,扫描参数如下:分辨率/质量为43.7mpts/3x,水平扫描角度为0
°
~360
°
,垂直扫描角度为-60
°
~90
°
,每站扫描时间为2
′
45
″
。
[0090]
地基激光雷达数据的预处理主要包括四部分:多站点扫描数据解算及拼接、去噪、小区分割和地面点滤波。
[0091]
多站点扫描数据解算及拼接:采用faro scene软件对获取的地基激光雷达数据进行扫描和拼接,faro scene通过自动对象识别、扫描拼接和定位能够高效轻松的处理和管理扫描数据。
[0092]
去噪:采用cloudcompare软件中集成的sor算法,通过确定标准差乘数阈值和使用估算平均距离的点数两个参数完成去噪。
[0093]
小区分割:首先基于点云数据绘制各小区矢量边界线,并调整边界线和点云数据位于同一高度,然后在cloudcompare软件中对各航线数据批量完成小区分割。
[0094]
地面点滤波:利用“布料”滤波算法clothsimulation filter,csf,分离植被点云和地面点云。
[0095]
如图2-3所示,根据玉米茎秆和叶片结构的不同,采用圆柱对玉米进行遍历,圆柱高为0.11m,直径为0.7m,对圆柱内的点拟合平面并提取其多维特征值和角度,然后采用随机森林进行训练和分类,完成玉米茎叶分离,如图4所示。
[0096]
从图5中可看出,本发明提供的方法可以很好的对该密度和品种的玉米进行茎叶分离。并对不同种植密度、不同生育期和不同平台的玉米进行茎叶分离。进一步证明本发明提供的方法的鲁棒性。其中,如图5(b)中黑框区域玉米倒伏,对茎叶分离结果产生了影响。
[0097]
本发明实现了高精度的对大田玉米进行茎叶分离。
[0098]
最后说明的是:以上公开的仅为本发明的一个具体实施例,但是,本发明实施例并非局限于此,任何本领域的技术人员能思之的变化都应落入本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1