基于时空注意力网络的缺失结构健康监测数据恢复方法
1.本发明涉及一种基于时空注意力网络的缺失结构健康监测数据恢复方法。
背景技术:
2.传感器是构成结构健康监测系统的基础,连续实时地记录了结构响应信息及环境条件,为结构服役性能的评估提供依据。但在长期的使用过程中,受信号传输错误、供电中断、传感器故障等影响,部分传感器出现暂时或永久的数据丢失现象几乎是不可避免的;一些故障传感器的异常数据本身缺乏有价值的信息,也可视作缺失数据。很多缺失的数据对于结构状态评估是不可或缺的,而一些基于传感器数据关联性的异常检测和状态评估方法依赖于数据完整性,数据的丢失破坏了这些关联挖掘的有效性。因此,对于更换代价较大、尤其是不可替换的传感器,需要通过数据恢复技术进行缺失数据重构。为提高数据重构精度,数据恢复常涉及大量传感器参与计算,可能会遇到过拟合等问题;此外,与缺失数据相关的非同类监测项目可能有助于提高回归的准确性,但需要充分考虑非同类数据之间的差异性。因此,有必要寻找适当的建模方法挖掘大量传感器之间的时空关联,同时采取合理手段融合多源数据,提高缺失数据恢复精度。
技术实现要素:
3.针对结构健康监测系统普遍存在的传感器数据缺失问题,本发明提供了一种基于时空注意力网络的缺失结构健康监测数据恢复方法。该方法利用与缺失测点数据相关的同类和非同类传感器数据,通过时空注意力网络挖掘多源数据的时空关联,实现对缺失数据的重构。本发明充分挖掘了大量传感器之间隐含的时空关联,融合了多源异构数据,提高了数据利用效率,解决了数据缺失问题。
4.本发明的目的是通过以下技术方案实现的:
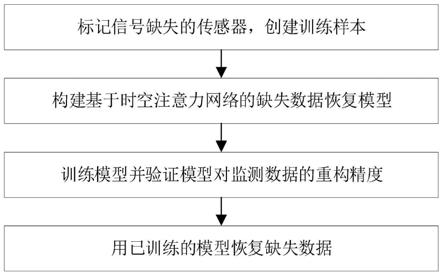
5.一种基于时空注意力网络的缺失结构健康监测数据恢复方法,包括如下步骤:
6.步骤1、标记部分时段信号缺失的异常传感器,创建数据重构的训练样本;
7.步骤2、利用时空注意力机制,构建基于时空注意力网络的缺失数据恢复模型;
8.步骤3、训练基于时空注意力网络的缺失数据恢复模型并验证基于时空注意力网络的缺失数据恢复模型对监测数据的重构精度;
9.步骤4、用已训练的基于时空注意力网络的缺失数据恢复模型恢复缺失数据。
10.相比于现有技术,本发明具有如下优点:
11.本发明利用时空注意力机制对监测数据时空关联进行建模,同时通过在空间注意力系数的计算中引入非同类监测数据实现多源数据的充分利用,与传统方法相比提高了缺失数据的恢复精度,利用注意力机制的自适应建模省去传感器相关性分析等步骤,克服了大量传感器参与计算时容易出现的过拟合问题。本发明能够充分利用监测系统的冗余信息,挖掘多源数据之间的时空关联,提高缺失数据恢复的准确性。
附图说明
12.图1为基于时空注意力网络的缺失结构健康监测数据恢复方法的流程示意图;
13.图2为步骤2的时空注意力网络结构示意图;
14.图3为步骤2的时空注意力网络中图卷积层、空间注意力层和时间注意力层的顶点特征聚合方向示意图;
15.图4为实施例中的缺失传感器信号恢复结果示意图;
16.图5为实施例中的不同数据恢复方法精度对比的示意图。
具体实施方式
17.下面结合附图对本发明的技术方案作进一步的说明,但并不局限于此,凡是对本发明技术方案进行修改或者等同替换,而不脱离本发明技术方案的精神和范围,均应涵盖在本发明的保护范围中。
18.本发明提供了一种基于时空注意力网络的缺失结构健康监测数据恢复方法,所述方法针对结构健康监测系统普遍存在的传感器数据缺失问题,利用与缺失测点数据相关的同类和非同类传感器数据,通过时空注意力网络挖掘多源数据的时空关联,实现对缺失数据的重构。在时空注意力网络中,首先通过图卷积层将正常的同类传感器信号映射到数据缺失测点,再通过时空注意力机制分别对传感器的时间关联和空间关联建模,可在空间关联建模过程中选择将非同类数据引入空间注意力系数的计算以融合多源数据,最后用全连接层组合时空特征获取重构信号。具体包括如下步骤:
19.步骤1、标记部分时段信号缺失的异常传感器,创建数据重构的训练样本,具体步骤如下:
20.标记部分时段信号缺失的异常传感器,寻找与这些异常传感器同类和非同类且相关的正常传感器,利用正常相关传感器包括t时刻在内先前一段时间的监测数据序列,重构异常传感器在t时刻的缺失信号。数据缺失的异常传感器数目记为na,其同类传感器数目记为n,正常同类传感器数目记为nn=n-na,非同类相关传感器数目为m。
21.t时刻的训练样本为其中,维度为nn×
l,l表示时间序列数据点数目,δt为数据点时间间隔,表示t时刻正常同类传感器数据,维度为nn;
22.h
t
=[h
t-(l-1)
·
δt
,...,h
t-δt
,h
t
]维度为m
×
l,h
t
表示t时刻正常非同类传感器数据,维度为m;表示t时刻数据缺失的异常传感器数据,维度为na。
[0023]
步骤2、利用时空注意力机制,构建基于时空注意力网络的缺失数据恢复模型。
[0024]
本步骤中,所述时空注意力网络由图卷积层、时空注意力单元和全连接层组成,其中:时空注意力单元由1个空间注意力层和1~3个时间注意力层组成。在图卷积层和空间注意力层中,每个顶点对应一个传感器,而在时间注意力层中,每个顶点对应一个时间点。
[0025]
1)图卷积层
[0026]
图卷积层采用可学习邻接矩阵的图卷积网络。如图3所示,传感器表示为连通图上的顶点,其中存在数据缺失问题的异常传感器表示为图的汇点。在各个时间点,图卷积层计算公式为:
[0027]
x
′
=axw
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0028]
式中,x表示图卷积层输入,维度为n
×
f;x
′
表示图卷积层输出,维度为n
×f′
;w表示待训练的权重,维度为f
×f′
;a表示可学习的邻接矩阵,维度为n
×
n,利用激活函数softmax归一化,a
ij
∈a表示源顶点sj指向目标顶点si的边权重。在第一个图卷积层中,输入特征数f=1,输入维度为nn×
1,待训练的权重维度为1
×f′
,邻接矩阵a的维度为nn×
n。
[0029]
2)空间注意力层
[0030]
在每个时间点,传感器表示为连通图上的顶点。空间注意力层利用多头(multi-head)注意力机制对传感器信号的空间相关性建模,共k个注意力head。
[0031]
如果仅考虑同类监测数据,第k个注意力head的注意力系数计算公式为:
[0032][0033]
式中,表示源顶点sj对目标顶点si的注意力系数(未归一化);表示待训练的权重,维度为f
′
/k;xi和xj分别表示目标顶点si和源顶点sj的输入特征,维度均为f;和分别表示目标顶点特征和源顶点特征的线性映射,维度均为f
′
/k,f
′
为k的整数倍;σ(
·
)表示激活函数tanh。
[0034]
如果同时考虑同类和非同类监测数据,第k个注意力head的注意力系数计算公式为:
[0035][0036]
式中,和表示待训练的权重,维度分别为(f
′
/k)
×
m和f
′
/k;h表示非同类传感器监测数据特征,维度为m。通过在空间注意力系数的计算中引入非同类传感器监测数据,实现多源数据融合。各注意力head中,权重和的初始化是不同的,进一步提高多头机制中不同注意力head之间的区分度。
[0037]
利用激活函数softmax对归一化,计算归一化注意力系数
[0038]
多头注意力连接k个平行的注意力head,计算公式表示为:
[0039][0040]
式中,x
′i表示顶点sj的输出特征,维度为f
′
,表示源顶点特征的线性映射,维度为f
′
/k;σ(
·
)表示激活函数elu。
[0041]
3)时间注意力层
[0042]
时间注意力层利用多头注意力机制对传感器信号的时间相关性建模。如图3所示,对于每个传感器,时间点表示为连通图上的顶点,数个时间点的特征聚合到最后一个时间点上。共k个注意力head,其中第k个注意力head的注意力系数计算公式为:
[0043]
[0044]
式中,表示源顶点tj对目标顶点ti的注意力系数(未归一化);yi和yj分别表示目标顶点ti和源顶点tj的输入特征,维度均为f;
[0045]
和分别表示目标顶点特征和源顶点特征的线性映射,维度均为f
′
/k,f
′
为k的整数倍。
[0046]
利用激活函数softmax对归一化,计算归一化注意力系数
[0047]
多头注意力连接k个平行的注意力head,计算公式表示为:
[0048][0049]
式中,y
′i表示顶点tj的输出特征,维度为f
′
,表示源顶点特征的线性映射,维度为f
′
/k;σ(
·
)表示激活函数elu。
[0050]
4)全连接层
[0051]
全连接层为最后的隐含层,取存在信号缺失的na个异常传感器在最后一个时间步的特征,通过聚合其所有特征重构缺失值。
[0052]
进一步地,所述时空注意力网络结构采用1个图卷积层、3个时空注意力单元和1个全连接层,每个时空注意力单元中采用1个空间注意力层和1个时间注意力层。在传感器数量大、必要考虑的时间序列长的应用场景下,可调整增加具体网络中的图卷积层数、时空注意力单元数及时间注意力层数。
[0053]
本步骤中,所述目标函数选用均方误差mse。
[0054]
步骤3、训练基于时空注意力网络的缺失数据恢复模型并验证基于时空注意力网络的缺失数据恢复模型对监测数据的重构精度。
[0055]
本步骤中,以传感器处于正常状态时的监测数据用于基于时空注意力网络的缺失数据恢复模型的训练与测试,基于时空注意力网络的缺失数据恢复模型训练过程采用交叉验证方法。
[0056]
步骤4、用已训练的基于时空注意力网络的缺失数据恢复模型恢复缺失数据。
[0057]
实施例:
[0058]
本实施例提供了一种基于时空注意力网络的缺失结构健康监测数据恢复方法,如图1所示,所述方法包括如下步骤:
[0059]
步骤1、标记部分时段信号缺失的异常传感器,创建数据重构的训练样本。
[0060]
本步骤中,某斜拉桥2006年至2007年初索力传感器的监测数据处于正常状态,但2007年11月之后,索力传感器a4、a20、a39存在幅值异常或信号缓漂问题,如图4监测信号,这些异常信号缺少有价值信息,故可视作缺失值。本实施例以这些故障索力传感器和正常传感器a42的索力趋势作为恢复目标;其中,a42用于检验恢复模型的长期表现。由于索力的趋势反映了其在静载荷和外部环境变化的影响下的变化,尤其与温度密切相关。因此,除了可用的同类索力监测数据,环境温度和结构温度也可以作为索力趋势恢复中的相关异类数据。标记部分时段信号缺失的异常索力传感器(a4、a20、a39,a42(用于验证)),寻找其他索力传感器(a1~3,a5~19,a21~38,a40,a41)和相关的温度传感器(b1~5),利用正常相关
传感器包括t时刻在内先前一段时间的监测数据序列,重构异常传感器在t时刻的缺失信号。数据缺失的异常传感器数目na=4,其同类传感器数目n=42,正常同类传感器数目nn=n-na=38,非同类相关传感器数目m=5。
[0061]
t时刻的训练样本为其中,维度为nn×
l,时间序列数据点数目l=7,数据点时间间隔δt为10分钟,表示t时刻正常同类传感器数据,维度为nn;
[0062]ht
=[h
t-(l-1)
·
δt
,...,h
t-δt
,h
t
]维度为m
×
l,h
t
表示t时刻正常非同类传感器数据,维度为m;表示t时刻数据缺失的异常传感器数据,维度为na。
[0063]
步骤2、利用时空注意力机制,构建基于时空注意力网络的缺失数据恢复模型。
[0064]
本步骤中,如图2所示,时空注意力网络由图卷积层、3个时空注意力单元和1个全连接层组成,每个时空注意力单元由1个空间注意力层和1个时间注意力层组成。时空注意力网络结构及各层参数分别为:
[0065]
l1-1层,输入维度为38
×7×
1,对每个时间步的输入38
×
1执行图卷积层操作,输出特征数量为16,激活函数为elu,输出维度为42
×7×
16。
[0066]
l2-1层,上接l1-1层,输入维度为42
×7×
16,对每个时间步的输入42
×
16执行空间注意力层操作,注意力head为8,每个注意力head输出特征为4,激活函数为elu,输出维度为42
×7×
32。
[0067]
l2-2层,上接l2-1层,输入维度为42
×7×
32,对每个传感器的输入7
×
32执行时间注意力层操作,注意力head为8,每个注意力head输出特征为4,输出维度为42
×7×
32。
[0068]
l2-3层,上接l1-1层,输入维度为42
×7×
16,执行张量线性变换操作,输出维度为42
×7×
32。
[0069]
l2-4层,上接l2-2层和l2-3层,输入维度均为42
×7×
32,执行张量叠加操作,激活函数为elu,输出维度为42
×7×
32。
[0070]
l3-1层,上接l2-4层,输入维度为42
×7×
32,对每个时间步的输入42
×
32执行空间注意力层操作,注意力head为8,每个注意力head输出特征为4,激活函数为elu,输出维度为42
×7×
32。
[0071]
l3-2层,上接l3-1层,输入维度为42
×7×
32,对每个传感器的输入7
×
32执行时间注意力层操作,注意力head为8,每个注意力head输出特征为4,输出维度为42
×7×
32。
[0072]
l3-3层,上接l2-4层,输入维度为42
×7×
32,执行张量线性变换操作,输出维度为42
×7×
32。
[0073]
l3-4层,上接l3-2层和l3-3层,输入维度均为42
×7×
32,执行张量叠加操作,激活函数为elu,输出维度为42
×7×
32。
[0074]
l4-1层,上接l3-4层,输入维度为42
×7×
32,对每个时间步的输入42
×
32执行空间注意力层操作,注意力head为8,每个注意力head输出特征为4,激活函数为elu,输出维度为42
×7×
32。
[0075]
l4-2层,上接l4-1层,输入维度为42
×7×
32,对每个传感器的输入7
×
32执行时间注意力层操作,注意力head为8,每个注意力head输出特征为4,输出维度为42
×7×
32。
[0076]
l4-3层,上接l3-4层,输入维度为42
×7×
32,执行张量线性变换操作,输出维度为42
×7×
32。
[0077]
l4-4层,上接l4-3层和l4-3层,输入维度均为42
×7×
32,执行张量叠加操作,激活函数为elu,输出维度为42
×7×
32。
[0078]
l5-1层,上接4-4层,输入维度为42
×7×
32,取存在信号缺失的4个异常传感器在最后一个时间步的特征,维度为4
×
32,执行全连接层操作,输出特征为1,输出维度为4。
[0079]
步骤3、训练基于时空注意力网络的缺失数据恢复模型并验证基于时空注意力网络的缺失数据恢复模型对监测数据的重构精度。
[0080]
本步骤中,以2007年2月之前的监测数据为参考数据,其中,以2007年1月19日之前的数据为训练数据,在训练集中,采用k折交叉验证;以2007年1月20日至2007年2月28日的数据为测试集,验证模型性能,图4的测试数据的重构信号相对于监测信号拟合良好。
[0081]
步骤4、用已训练的基于时空注意力网络的缺失数据恢复模型恢复缺失数据。
[0082]
本步骤中,用训练好的模型恢复传感器a4、a20、a39和a42在2007年11月之后的缺失信号。根据图4可以发现,各传感器的恢复结果在测试集上表现良好;而a42传感器作为正常传感器,其重构信号与实测信号相比长期保持良好的拟合精度。
[0083]
为验证时空注意力机制对提高恢复精度的有效性,以全连接网络作为基准模型,并在此基础上逐步引入时空注意力机制和异类监测数据,对比了如下几种方法的数据恢复精度:
[0084]
1)方法1:基准模型,以全连接形式建立时空关联。
[0085]
2)方法2:利用注意力机制建立时空关联。为了验证不同注意力机制计算公式的表现,在空间注意力层中比较了在常用的三种注意力机制,包括dotproduct(方法2-1)、concatenation(方法2-2)和addition(方法2-3)。这些方法的公式记为:
[0086][0087]
式中,e
ij
是注意力系数(未归一化);f1(xi)和f2(xj)表示xi和xj的线性映射;a和v分别表示不同公式中可学习的权重向量,维度分别为2f
′
和f
′
。
[0088]
3)方法3:相比方法2,将异类监测数据引入空间注意力系数的计算,即采用公式(3)。
[0089]
利用上述方法对标准化的索力进行恢复,重构结果的均方根误差rmse和绝对平均误差mae如图5所示。结果表明,时空注意力机制的利用和异类监测数据在空间注意力机制中的引入能够有效提高缺失数据的重构精度。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1