一种高频电磁散射遮挡识别方法与流程
1.本发明属于电磁散射技术领域,具体涉及一种高频电磁散射遮挡识别方法。
背景技术:
2.物理光学(po)法是计算电大尺寸目标电磁散射特性的一种重要高频近似方法。在物理光学法中,需要通过遮挡识别技术判断目标的亮区和暗区。根据物理光学假设,只有入射波直接照射的区域(亮区)才会产生感应电流,进而产生散射场,因此遮挡识别准确性对物理光学法的计算精度有重要影响。同时遮挡识别也是物理光学法中计算最为耗时的部分,所以一种高效率的遮挡识别方法,对计算电大尺寸目标电磁散射特性具有重要意义。
3.传统遮挡识别方法是将目标模型中n个三角面元依次遍历,然后通过矩阵方程求解判断每个面元与其他n-1个面元的遮挡关系,其计算量为o(n2)。这种方法遮挡识别结果非常准确,但存在计算量大、计算耗时长等不足。
4.为提高计算效率,党晓杰等(参见文献:党晓杰,袁浩波,王楠等.mom-po混合方法中一种遮挡消影的新算法[j].西安电子科技大学学报(自然科学版),2012,39(1),pp.38-41)对传统遮挡识别方法进行改进,提出了一种基于计算机图形学的z-buffer算法。该方法将物体用长方体盒子包围,将盒子六个面作为投影平面,利用z-buffer算法将所有三角形分组以去掉耦合作用,将遮挡识别计算量降低到o(n)。但整个判断过程较为复杂,内存占用较高,结果不够精确。
[0005]
西安电子科技大学在其申请的专利文献“基于投影法的高频电磁遮挡判断方法”(申请号:201810112986.x,申请公告号:cn 108446430 a)公开了一种基于投影法的遮挡判断方法。该方法将目标三角面元模型全部投影到入射波矢量为法向量的投影平面上,直接比较三角面元距投影平面的高度来判断遮挡关系。该方法遮挡识别计算量为o(n),但不足之处在于需要对三角面元投影进行分集,而分集时采用的矩形框尺寸大小对遮挡识别准确度影响较大,矩形框尺寸大小只能通过经验确定。因此当目标尺寸较大时,遮挡识别准确度降低。
技术实现要素:
[0006]
本发明的目的在于提供一种高频电磁散射遮挡识别方法,解决目标尺寸较大时,遮挡识别准确度不高的技术问题。
[0007]
为实现上述目的,解决上述技术问题,本发明提供一种高频电磁散射遮挡识别方法技术方案如下,包括如下步骤:
[0008]
s1、对目标表面进行三角面元剖分;
[0009]
s2、将三角面元投影至投影平面;
[0010]
设三角元剖分时目标模型中一三角面元δk的顶点坐标分别为ak(x1,y1,z1)、bk(x2,y2,z2)、ck(x3,y3,z3),k=1,2,...,n,则坐标原点到三角面元中心点的矢量和该三角面元δk外向单位法矢量分别为:
[0011][0012]
其中
[0013][0014]
平面波入射时,若入射方向单位矢量为其投影平面为外向单位法矢量为且经过坐标原点o的平面,则该三角面元δk顶点在投影平面上投影坐标分别为a
′k、b
′k、c
′k,坐标原点o到投影坐标点的矢量表示为:
[0015][0016]
s3、计算投影距离并对三角面元进行降序排序
[0017]
三角面元δk与投影平面的距离lk通过下式求出:
[0018][0019]
利用公式(3)计算出目标所有三角面元与投影平面的距离,然后根据投影距离大小对三角面元和其投影三角面元进行降序排序;
[0020]
s4、计算坐标原点至投影三角面元中心点的矢量
[0021]
利用公式(1)计算坐标原点至投影三角面元中心点的矢量
[0022]
s5、计算投影三角面元的平均边长
[0023]
投影三角面元的平均边长为:
[0024][0025]
其中
[0026][0027]
s6、建立亮区三角面元及其投影三角面元集合
[0028]
构建亮区三角面元集合light(δ1,δ2,...,δm),亮区投影三角面元集合light
′
(δ
′1,δ
′2,...,δ
′m);用于将后续判断结果依次加入到相应的集合中;
[0029]
s7、利用圆形区域分解技术对亮区集合进行分区过滤
[0030]
依据步骤s3,第一个三角面元距离入射平面波最近,属于亮区,记为δ1,接下来根据排序结果依次判断该三角面元是否被亮区三角面元遮挡,若均不被遮挡,则也属于亮区;
[0031]
对亮区投影三角面元集合light
′
(δ
′1,δ
′2,...,δ
′m)进行分区过滤;依据步骤4,若一待遮挡识别三角面元为δ
ξ
,其坐标原点至投影三角面元δ
′
ξ
中心点的矢量为则该投影三角面元δ
′
ξ
中心点与集合light
′
(δ
′1,δ
′2,...,δ
′m)中各投影三角面元中心点的距离表示为:
[0032][0033]
式中,为坐标原点至集合light
′
中投影三角面元δ
′k中心点的矢量;
[0034]
当dk较大时,三角面元δ
′
ξ
与δ
′k相距较远,不会被遮挡;
[0035]
在投影平面上以q
′
ξ
为中心绘制半径为r的圆形区域,剔除投影中心点属于圆形区域外的亮区三角面元,只保留投影中心点属于圆形区域内的亮区三角面元,具体判断公式为:
[0036][0037]
式中,η为区域分解系数,其值越大,遮挡识别准确度越高,同时计算量和占用内存也越大;
[0038]
当σk>0时,将δk和δ
′k分别从亮区集合light和light
′
中剔除;当σk≤0时,保留亮区集合light和light
′
中的三角面元δk和δ
′k。
[0039]
s8、利用面积比较法判断三角面元是否被分区过滤后的亮区集合三角面元遮挡
[0040]
判断δ
ξ
与分区过滤后的亮区三角面元集合的遮挡关系,集合light中一三角面元为δk,其投影三角面元为,在投影平面上,若δ
′
ξ
中心点q
′
ξ
在三角面元δ
′k内部,说明δ
ξ
被δk遮挡;若δ
′
ξ
中心点q
′
ξ
在三角面元δ
′k外部,说明δ
ξ
未被δk遮挡,具体通过面积比较法判断:
[0041][0042]
其中,s
δ
表示三角形面积,通过海伦公式计算得到,即
[0043][0044]
式中,a,b,c为三角形的三条边长。
[0045]
当σ
δ
≥0时,说明中心点q
′
ξ
在δ
′k外部,即δ
ξ
未被δk遮挡。
[0046]
判断δ
ξ
与分区过滤后所有亮区三角面元的遮挡关系:
[0047]
若均未被遮挡,则δ
ξ
属于亮区,同时将δ
ξ
和δ
′
ξ
分别添加进亮区集合light和light
′
中;
[0048]
若δ
ξ
被亮区集合中任一三角面元遮挡,则δ
ξ
属于暗区,亮区集合light和light
′
保持不变;
[0049]
然后对δ
ξ+1
进行遮挡识别
[0050]
s9、识别目标所有三角面元亮区和暗区
[0051]
依次循环步骤s7和s8,对步骤s3降序排序的所有三角面元进行遮挡识别,直至待遮挡识别三角面元全部识别完毕为止,获得识别目标的亮区和暗区。
[0052]
与现有技术相比,本发明具有以下有益的技术效果:
[0053]
本发明通过对目标三角面元进行投影排序,在投影面上采用圆形区域分解技术加速遮挡识别过程,使遮挡识别计算量降低到o(n),同时利用投影面积比较法判断三角面元之间的遮挡关系,相较于传统矩阵方程求解判断方法,简化了遮挡判断过程,从而实现对电大尺寸目标电磁散射特性的高效计算,保证了较高的识别准确度。
附图说明
[0054]
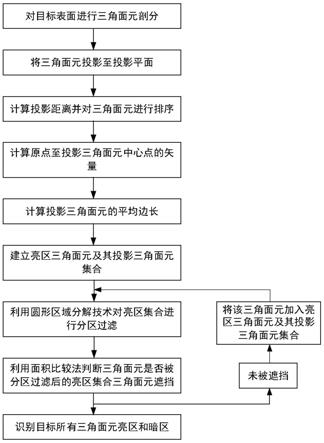
图1是本发明实现的流程图示意图;
[0055]
图2是平面波入射时三角面元投影示意图;
[0056]
图3是投影平面圆形区域分解示意图;
[0057]
图4是投影面积比较法判断三角面元是否被遮挡示意图(左图:未被遮挡;右图:被遮挡);
[0058]
图5是本发明实施例中待求的目标模型示意图;
[0059]
图6是本发明方法对目标亮区和暗区的遮挡识别结果;
[0060]
图7是本发明方法对目标双站雷达散射截面计算结果。
具体实施方式
[0061]
下面结合附图对本发明的具体实施方式作进一步详细的解释和说明。
[0062]
如图1所示,本发明提供了一种高频电磁散射遮挡识别方法,包括以下步骤:
[0063]
s1、对目标表面进行三角面元剖分
[0064]
利用cad或feko软件建立目标几何模型,然后将目标表面剖分为n个三角面元,记录每个三角面元的顶点坐标(可以保存为stl格式文件,stl格式文件中包括了所有三角面元的顶点坐标信息)。为保证物理光学法的计算精度,剖分三角面元的边长应不大于目标表面曲率半径的1/8,并且不大于入射波波长的1/2,同时将目标模型中心置于坐标原点。
[0065]
s2、将三角面元投影至投影平面
[0066]
若目标模型中一三角面元δk的顶点坐标分别为ak(x1,y1,z1)、bk(x2,y2,z2)、ck(x3,y3,z3),k=1,2,...,n,则坐标原点到三角面元中心点的矢量和该三角面元外向单位法矢量分别为:
[0067][0068]
其中
[0069][0070]
如图2,平面波入射时,若入射方向单位矢量为其投影平面为外向单位法矢量为且经过坐标原点o的平面。则该三角面元顶点在投影平面上投影坐标分别为a
′k、b
′k、c
′k,坐标原点o到投影坐标点的矢量可以表示为:
[0071][0072]
s3、计算投影距离并对三角面元进行降序排序
[0073]
三角面元δk与投影平面的距离lk可以通过下式求出:
[0074][0075]
通过式(3)计算出目标所有三角面元与投影平面的距离,然后根据距离大小对三角面元和其投影三角面元进行降序排序。
[0076]
s4、计算坐标原点至投影三角面元中心点的矢量
[0077]
坐标原点至投影三角面元中心点的矢量也可以利用式(1)计算得到,只需要将式中的替换为
[0078]
s5、计算投影三角面元的平均边长
[0079]
投影三角面元的平均边长为:
[0080][0081]
其中
[0082][0083]
s6、建立亮区三角面元及其投影三角面元集合
[0084]
步骤s3给出了三角面元降序排序结果,因第一个三角面元距离入射平面波最近,属于亮区,记为δ1。接下来根据排序结果依次判断该三角面元是否被亮区三角面元遮挡,若均不被遮挡,则也属于亮区。为便于统计,将亮区三角面元组成一个集合light(δ1,δ2,...,δm),其投影三角面元组成另一个集合light
′
(δ
′1,δ
′2,...,δ
′m)。
[0085]
s7、利用圆形区域分解技术对亮区集合进行分区过滤
[0086]
为加快遮识别效率,对亮区投影三角面元集合light
′
(δ
′1,δ
′2,...,δ
′m)进行分区过滤。步骤s4给出了坐标原点至投影三角面元中心点的矢量,若一待遮挡识别三角面元为δ
ξ
,其坐标原点至投影三角面元δ
′
ξ
中心点的矢量为则该投影三角面元δ
′
ξ
中心点与集合light
′
(δ
′1,δ
′2,...,δ
′m)中各投影三角面元中心点的距离可以表示为:
[0087][0088]
式中,为坐标原点至集合light
′
中投影三角面元δ
′k中心点的矢量。
[0089]
当dk较大时,三角面元δ
′
ξ
与δ
′k相距较远,一定不会被遮挡。因此可以在投影平面上以q
′
ξ
为中心绘制半径为r的圆形区域,剔除投影中心点属于圆形区域外的亮区三角面元,只保留投影中心点属于圆形区域内的亮区三角面元,如图3。具体判断公式为:
[0090][0091]
式中,η为区域分解系数,其值越大,遮挡识别准确度越高,同时计算量和占用内存也越大。综合考虑遮挡识别准确度和计算效率,η一般选择为3。
[0092]
当σk>0时,将δk和δ
′k分别从亮区集合light和light
′
中剔除;当σk≤0时,保留亮区集合light和light
′
中的三角面元δk和δ
′k。
[0093]
s8、利用面积比较法判断三角面元是否被分区过滤后的亮区集合三角面元遮挡
[0094]
经步骤7亮区分区过滤后,亮区集合三角面元数目已大大减小。接下来判断δ
ξ
与分区过滤后的亮区三角面元集合的遮挡关系。集合light中一三角面元为δk,其投影三角面元为δ
′k。如图4,在投影平面上,若δ
′
ξ
中心点q
′
ξ
在三角面元δ
′k内部,说明δ
ξ
被δk遮挡。若δ
′
ξ
中心点q
′
ξ
在三角面元δ
′k外部,说明δ
ξ
未被δk遮挡。具体通过面积比较法判断:
[0095][0096]
其中,s
δ
表示三角形面积,可以通过海伦公式计算得到,即
[0097]
[0098]
式中,a,b,c为三角形的三条边长。
[0099]
当σ
δ
≥0时,说明中心点q
′
ξ
在δ
′k外部,即δ
ξ
未被δk遮挡。
[0100]
采用该方法判断δ
ξ
与分区过滤后所有亮区三角面元的遮挡关系:
[0101]
若均未被遮挡,则δ
ξ
属于亮区,同时将δ
ξ
和δ
′
ξ
分别添加进亮区集合light和light
′
中;
[0102]
若被亮区集合中任一三角面元遮挡,则δ
ξ
属于暗区,亮区集合light和light
′
保持不变;开始进行δ
ξ+1
的遮挡识别。
[0103]
s9、识别目标所有三角面元亮区和暗区
[0104]
依次循环步骤s7和s8,对步骤s3降序排序的所有三角面元进行遮挡识别,直至待遮挡识别三角面元全部识别完毕为止,获得识别目标的亮区和暗区。
[0105]
本发明的具体应用如下:上述遮挡识别过程完成后,便可以通过物理光学法对目标电磁散射特性作进一步求解。下面以理想导体目标为例,计算其双站雷达散射截面。
[0106]
首先计算亮区三角面元的远区散射场
[0107]
理想导体目标的远区散射场可以通过下式计算:
[0108][0109]
其中
[0110][0111][0112]
式中,k0为自由空间波数,与频率f的关系为k0=2πf/c0,其中c0为自由空间光速;为入射波电场极化方向单位矢量;e0为入射波电场振幅;r为坐标原点与远场观察点之间的距离,取值至少为目标尺寸的10倍以上;为坐标原点至远场观察点的散射方向单位矢量;为坐标原点至第m个三角面元中心点的矢量;为第m个三角面元的外向单位法矢量;为坐标原点至第m个三角面元三个顶点的矢量,且
[0113]
计算目标双站雷达散射截面,根据雷达散射截面定义,目标双站雷达散射截面可以由下式计算:
[0114][0115]
实施例1
[0116]
如图5,目标为一半径为0.45m的金属球,其表面经过feko软件剖分为6790个三角面元。频率为1ghz的平面波沿x轴正方向入射,电场极化方向平行于z轴。利用本发明方法对金属球亮区和暗区进行遮挡识别,如图6。本发明方法识别亮区三角面元数目为3353个,用时约0.52s。而采用传统方法识别亮区三角面元数目为3365个,用时约2.13s。即本发明方法遮挡识别精确度达到99.6%,且识别速度较传统方法快约4.1倍。
[0117]
在保持入射波特性不变,对金属球表面进一步细分,使其达到15498个三角面元。
采用本发明方法识别亮区三角面元数目为7337个,用时约1.72s。采用传统方法识别亮区三角面元数目为7365个,用时约8.70s。此时本发明方法遮挡识别精确度达到99.6%,且识别速度较传统方法快约5.1倍。根据遮挡识别结果,按照步骤9和步骤10计算xoy平面内,0
°
至180
°
范围的目标双站雷达散射截面,如图7。图中雷达散射截面计算结果与电磁仿真软件po方法计算结果一致,说明本发明遮挡识别方法的有效性。
[0118]
上述结果表明,相较于传统遮挡识别方法,本发明方法在保证较高遮挡识别准确度的情况下,提高了遮挡识别效率。尤其对尺寸越大,面元剖分越细的目标,其识别效率较传统方法越高。
[0119]
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1