一种基于深度学习的建筑物规则轮廓的提取方法及系统与流程
1.本发明涉及图像处理技术领域,尤其涉及一种基于深度学习的建筑物规则轮廓的提取方法及系统。
背景技术:
2.随着图像传感器技术的快速进步,人们对于遥感影像的获取难度逐渐降低,而影像的分辨率在不断提高,卫星遥感影像已经能轻松达到亚米级的地面分辨率。近年来,随着我国经济的快速发展,遥感影像的应用范围也不断扩大,包括土地变化检测、城市数据更新、防灾应急、城市规划、人口估计、地形图制作和更新等多个方面。因此,利用遥感影像进行建筑物识别和提取成为近年来遥感科学工作中的热点。
3.传统的建筑物提取方法主要分为两大类:一类是基于多光谱遥感影像的建筑物提取算法,主要是利用不同地物的光谱反射特性存在的差异性,通过多光谱遥感影像的波段计算出不同地物;另一类是全色影像或者rgb影像进行地物提取,主要是利用图像的几何特征、纹理头文字进行图像分割实现地物提取。然而,传统的建筑物提取算法容易受到季节天气变化、传感器质量以及建筑物风格等各种因素的影响,导致提取精度不够高,难以应用到实际生活中。因此实际生活中,大部分的建筑物提取方式仍然采用人工手动进行标注,耗费较多人力、财力,并且时间成本高,工作效率低。
技术实现要素:
4.本发明提供了一种基于深度学习的建筑物规则轮廓的提取方法及系统,降低时间成本,并优化遥感影像对应的建筑物的轮廓,以提升建筑物轮廓规则化提取的精度。
5.为了解决上述技术问题,本发明实施例提供了一种基于深度学习的建筑物规则轮廓的提取方法,包括:
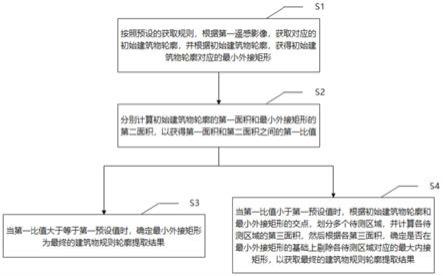
6.按照预设的获取规则,根据第一遥感影像,获取对应的初始建筑物轮廓,并根据所述初始建筑物轮廓,获得所述初始建筑物轮廓对应的最小外接矩形;
7.分别计算所述初始建筑物轮廓的第一面积和所述最小外接矩形的第二面积,以获得所述第一面积和所述第二面积之间的第一比值;
8.当所述第一比值大于等于第一预设值时,确定所述最小外接矩形为最终的建筑物规则轮廓提取结果;
9.当所述第一比值小于所述第一预设值时,根据所述初始建筑物轮廓和所述最小外接矩形的交点,划分多个待测区域,并计算各所述待测区域的第三面积,然后根据各所述第三面积,确定是否在所述最小外接矩形的基础上剔除各所述待测区域对应的最大内接矩形,以获取最终的建筑物规则轮廓提取结果。
10.实施本技术实施例,可以根据第一遥感影像,获取模糊的初始建筑物轮廓,并基于最小外接矩形和最大内接矩形的优化算法,对所述初始建筑物轮廓进行规则化处理,以获得更为精准的建筑物规则轮廓。
11.进一步地,所述根据各所述第三面积,确定是否在所述最小外接矩形的基础上剔除各所述待测区域对应的最大内接矩形,以获取最终的建筑物规则轮廓提取结果,具体为:
12.计算所述第一面积和所述第二面积的差值,以获得各所述第三面积和所述差值之间的第二比值,并根据各所述第二比值和第二预设值的大小关系,确定最终的建筑物规则轮廓提取结果;
13.若当前所述第二比值大于等于第二预设值,则获取当前所述待测区域对应的最大内接矩形,并在当前所述最小外接矩形的基础上剔除所述最大内接矩形,获得更新后的最小外接矩形;
14.若当前所述第二比值小于第二预设值,则在当前所述最小外接矩形的基础上保留当前所述待测区域,获得更新后的最小外接矩形;
15.在完成对所有所述待测区域的处理并获得更新后的所述最小外接矩形之后,将当前所述最小外接矩形作为最终的建筑物规则轮廓提取结果。
16.实施本技术实施例,可以通过所述第二比值和所述第二预设值的大小关系,判断当前的所述待测区域的面积是否低于预设的可接受范围,即当前的所述待测区域是否在一定范围内可以忽略不计,不影响最终的建筑物规则轮廓提取结果,进而提升建筑物轮廓规则化提取的精度。
17.进一步地,所述按照预设的获取规则,根据第一遥感影像,获取对应的初始建筑物轮廓,并根据所述初始建筑物轮廓,获得所述初始建筑物轮廓对应的最小外接矩形,具体为:
18.将第一遥感影像输入至分割模型,提取所述第一遥感影像的特征,获得所述第一遥感影像对应的第一特征图;
19.对所述第一特征图进行多语义多尺度融合,得到所述第一特征图对应的第二特征图;
20.按照预设的规则,对所述第二特征图进行预测,得到对应的第一二值图像;
21.对所述第一二值图像依次进行腐蚀和膨胀的滤波预处理,得到对应的第二二值图像;其中,所述第二二值图像包含所述初始建筑物轮廓;
22.根据所述初始建筑物轮廓,获得所述初始建筑物轮廓对应的最小外接矩形。
23.实施本技术实施例,可以通过分割模型提取所述第一遥感影像的特征,并对提取到的特征进行预测,以实现对所述第一遥感影像的分割处理,并得到对应的所述第一二值图像。在得到所述第一二值图像之后,还可以对所述第一二值图像依次进行腐蚀和膨胀的滤波预处理,消除所述第一二值图像中的干扰噪声并填充其空洞点,最终得到对应的所述第二二值图像。
24.进一步地,在所述将第一遥感影像输入至分割模型,提取所述第一遥感影像的特征,获得所述第一遥感影像对应的第一特征图之前,还包括:
25.获取多个第二遥感影像,并根据各所述第二遥感影像,分别获取各所述第二遥感影像对应的二值图像;其中,一个所述第二遥感影像对应一个所述二值图像;
26.按照预设的样本图像参数,分别对各所述第二遥感影像和各所述二值图像进行随机裁剪,得到若干个所述第二遥感影像对应的样本图像,以及若干个所述二值图像对应的图像标签,并对所有所述样本图像和所有所述图像标签进行数据增强处理,以获得训练数
据集;其中,一个所述样本图像对应一个所述图像标签;
27.构建深度神经网络模型,并利用所述训练数据集对所述深度神经网络模型进行训练,得到分割模型。
28.实施本技术实施例,可以对各所述第二遥感影像和各所述二值图像进行随机裁剪,得到若干个样本图像和对应的图像标签,并对构成训练数据集的若干个样本图像和对应的图像标签进行数据增强处理,丰富训练数据集的数据数量和数据类型,使得训练得到的分割模型能够适应多种类型的遥感影像,增强模型的泛化能力。
29.为了解决相同的技术问题,本发明还提供了一种基于深度学习的建筑物规则轮廓的提取系统,包括:
30.预处理模块,用于按照预设的获取规则,根据第一遥感影像,获取对应的初始建筑物轮廓,并根据所述初始建筑物轮廓,获得所述初始建筑物轮廓对应的最小外接矩形;
31.计算模块,用于分别计算所述初始建筑物轮廓的第一面积和所述最小外接矩形的第二面积,以获得所述第一面积和所述第二面积之间的第一比值;
32.第一轮廓提取模块,用于当所述第一比值大于等于第一预设值时,确定所述最小外接矩形为最终的建筑物规则轮廓提取结果;
33.第二轮廓提取模块,用于当所述第一比值小于所述第一预设值时,根据所述初始建筑物轮廓和所述最小外接矩形的交点,划分多个待测区域,并计算各所述待测区域的第三面积,然后根据各所述第三面积,确定是否在所述最小外接矩形的基础上剔除各所述待测区域对应的最大内接矩形,以获取最终的建筑物规则轮廓提取结果。
34.进一步地,所述第二轮廓提取模块,还包括:
35.数据处理单元,用于计算所述第一面积和所述第二面积的差值,以获得各所述第三面积和所述差值之间的第二比值;
36.第一轮廓提取单元,用于若当前所述第二比值大于等于第二预设值,则获取当前所述待测区域对应的最大内接矩形,并在当前所述最小外接矩形的基础上剔除所述最大内接矩形,获得更新后的最小外接矩形;
37.第二轮廓提取单元,用于若当前所述第二比值小于第二预设值,则在当前所述最小外接矩形的基础上保留当前所述待测区域,获得更新后的最小外接矩形;
38.结果获取单元,用于在完成对所有所述待测区域的处理并获得更新后的所述最小外接矩形之后,将当前所述最小外接矩形作为最终的建筑物规则轮廓提取结果。
39.进一步地,所述预处理模块,还包括:
40.特征提取单元,用于将所述第一遥感影像输入至分割模型,提取所述第一遥感影像的特征,获得所述第一遥感影像对应的第一特征图;
41.特征融合单元,用于对所述第一特征图进行多语义多尺度融合,得到所述第一特征图对应的第二特征图;
42.预测单元,用于按照预设的规则,对所述第二特征图进行预测,得到对应的第一二值图像;
43.预处理单元,用于对所述第一二值图像依次进行腐蚀和膨胀的滤波预处理,得到对应的第二二值图像;其中,所述第二二值图像包含所述初始建筑物轮廓;
44.第三轮廓提取单元,用于根据所述初始建筑物轮廓,获得所述初始建筑物轮廓对
应的最小外接矩形。
45.进一步地,所述基于深度学习的建筑物规则轮廓的提取系统,还包括:
46.模型训练模块,用于获取多个第二遥感影像,并根据各所述第二遥感影像,分别获取各所述第二遥感影像对应的二值图像;其中,一个所述第二遥感影像对应一个所述二值图像;按照预设的样本图像参数,分别对各所述第二遥感影像和各所述二值图像进行随机裁剪,得到若干个所述第二遥感影像对应的样本图像,以及若干个所述二值图像对应的图像标签,并对所有所述样本图像和所有所述图像标签进行数据增强处理,以获得训练数据集;其中,一个所述样本图像对应一个所述图像标签;构建深度神经网络模型,并利用所述训练数据集对所述深度神经网络模型进行训练,得到分割模型。
47.相比于现有技术,本发明实施例具有如下有益效果:
48.本发明提供了一种基于深度学习的建筑物规则轮廓的提取方法及系统,通过获取初始建筑物轮廓对应的最小外接矩形,初步对第一遥感影像中粗略的初始建筑物轮廓进行规则化处理。并且,在最小外接矩形与初始建筑物轮廓的面积相差较大时,根据最小外接矩形与初始建筑物轮廓的交点划分多个待测区域,并根据待测区域的面积确定是否在最小外接矩形的基础上剔除待测区域对应的最大内接矩形,进一步优化第一遥感影像中建筑物的轮廓,提升建筑物轮廓规则化提取的精度。
49.进一步地,本发明还利用分割模型对第一遥感影像进行分割处理,并对分割结果进行腐蚀和膨胀的滤波预处理,消除干扰噪声,填充空洞点,优化初始数据,进一步提升建筑物规则轮廓提取的精度;其中,分割模型是利用训练数据集对深度神经网络模型进行训练而获得的,使得分割模型能够适应多种类型的遥感影像,增强模型的泛化能力。
附图说明
50.图1:为本发明一实施例提供的一种基于深度学习的建筑物规则轮廓的提取方法的流程示意图;
51.图2:为本发明一实施例提供的一种获取第一二值图像的流程示意图;
52.图3:为本发明一实施例提供的拼接得到的一个训练样本;
53.图4:为本发明一实施例提供的一种基于最小外接矩形和最大外接矩形的建筑物轮廓规则化的流程示意图;
54.图5:为本发明一实施例提供的一种基于深度学习的建筑物规则轮廓的提取系统的结构示意图;
55.图6:为本发明一实施例提供的一种基于深度学习的建筑物规则轮廓的提取系统的预处理模块的结构示意图;
56.图7:为本发明一实施例提供的一种基于深度学习的建筑物规则轮廓的提取系统的第二轮廓提取模块的结构示意图。
具体实施方式
57.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他
实施例,都属于本发明保护的范围。
58.实施例一:
59.请参照图1,为本发明实施例提供的一种基于深度学习的建筑物规则轮廓的提取方法,该方法包括步骤s1至步骤s4,各步骤具体如下:
60.步骤s1:按照预设的获取规则,根据第一遥感影像,获取对应的初始建筑物轮廓,并根据初始建筑物轮廓,获得初始建筑物轮廓对应的最小外接矩形。
61.进一步地,步骤s1具体包括步骤s11至步骤s15,各步骤具体如下:
62.步骤s11:将第一遥感影像输入至分割模型,提取第一遥感影像的特征,获得第一遥感影像对应的第一特征图。
63.在本实施例中,请参照图2,分割模型选用resnet50,对输入的第一遥感影像进行特征提取,获得对应的第一特征图(即featuremap)。其中,第一特征图的尺寸大小是对应的第一遥感影像的尺寸大小的缩放8倍。
64.步骤s12:对第一特征图进行多语义多尺度融合,得到第一特征图对应的第二特征图。
65.在本实施例中,分割模型中的多语义多尺度融合的过程具体为:
66.首先,请参照图2,通过以下四个分支分别提取第一特征图的不同特征。
67.第一分支:对第一特征图进行全局平均池化操作,得到大小为1
×
1的bin_1;
68.第二分支:将第一特征图分为2
×
2个子区域,然后分别对每个子区域进行全局平均池化操作,得到大小为2
×
2的bin_2;
69.第三分支:将第一特征图分为3
×
3个子区域,然后分别对每个子区域进行平均池化操作,得到大小为3
×
3大小的bin_3;
70.第四分支:将特征影像分为6
×
6个子区域,然后分别对每个子区域进行平均池化操作,得到大小为6
×
6大小的bin_4;
71.其次,分别对bin_1、bin_2、bin_3、bin_4进行1
×
1卷积操作,将输出维数降低为原来输入维数的1/4,并分别对bin_1、bin_2、bin_3、bin_4进行双线性插值上采样操作,以获得对应的第一分支图像、第二分支图像、第三分支图像、第四分支图像。其中,第一分支图像、第二分支图像、第三分支图像、第四分支图像的分辨率大小和第一特征图的分辨率大小相同。
72.最后,采用通道聚合方式,在第一特征图的基础上,以通道为轴,依次叠加第一分支图像、第二分支图像、第三分支图像、第四分支图像,最终形成第一特征图对应的第二特征图。
73.步骤s13:按照预设的规则,对第二特征图进行预测,得到对应的第一二值图像。
74.在本实施例中,请参照图2,通过分割模型,对完成多语义多尺度融合得到的第二特征图进行预测(final prediction),得到对应的第一二值图像。
75.步骤s14:对第一二值图像依次进行腐蚀和膨胀的滤波预处理,得到对应的第二二值图像;其中,第二二值图像包含初始建筑物轮廓。
76.在本实施例中,腐蚀和膨胀操作属于形态学滤波处理,用于去除干扰噪声,具体为:对第一二值图像进行腐蚀,消除第一二值图像中的孤立点噪声;并对完成腐蚀操作的第一二值图像进行膨胀操作,填充小块空洞。
77.其中,腐蚀和膨胀操作采用3
×
3大小的矩形结构元素来构造运算卷积核。
78.步骤s15:根据初始建筑物轮廓,获得初始建筑物轮廓对应的最小外接矩形。
79.进一步地,在步骤s11之前,还包括步骤s01至步骤s03,各步骤具体如下:
80.步骤s01:获取多个第二遥感影像,并根据各第二遥感影像,分别获取各第二遥感影像对应的二值图像;其中,一个第二遥感影像对应一个二值图像。
81.在本实施例中,从bigemap上获取高清的tif格式的第二遥感影像,并将高清的第二遥感影像导入arcgis软件,以制作建筑物轮廓shp格式矢量文件。然后利用arcgis软件中的掩模提取工具,对建筑物轮廓shp格式矢量文件进行提取分析,进而获得对应的建筑物掩模图像。最后,通过图像处理,将建筑物掩模图像转换为对应的二值图像。其中,对于二值图像而言,0值表示背景,255值表示建筑物。
82.步骤s02:按照预设的样本图像参数,分别对各第二遥感影像和各二值图像进行随机裁剪,得到若干个第二遥感影像对应的样本图像,以及若干个二值图像对应的图像标签,并对所有样本图像和所有图像标签进行数据增强处理,以获得训练数据集;其中,一个样本图像对应一个图像标签。
83.在本实施例中,由于数据获取的过程存在随机性,所以获取的所有第二遥感影像以及对应的二值图像的尺寸大小不统一,会影响后续的训练效果。因此,在对初始模型进行训练之前,根据实际显卡的处理能力,预先设置样本图像的高度和宽度等参数,并根据预先设置的参数,在各第二遥感影像上进行随机裁剪,得到若干个第二遥感影像对应的样本图像,同样地,在各二值图像进行随机裁剪,得到若干个二值图像对应的图像标签。
84.作为一种举例,设置样本图像的高度image_height=512,样本图像的宽度image_width=512,然后在各第二遥感影像上随机裁剪大小为512
×
512的样本图像,并在各二值图像上随机裁剪大小为512
×
512的图像标签。
85.由上可见,每一次裁剪得到的样本图像和图像标签对应第二遥感影像和各二值图像的不同区域,即确保每次裁剪得到的样本图像和图像标签具有空间随机性。其中,所有的样本图像和所有的图像标签的尺寸一致,图像标签是对应的样本图像中建筑物所在位置的表示。
86.为了进一步丰富训练数据集,并提升训练数据集的涵盖范围,对所有样本图像和所有图像标签进行数据增强处理,以获得训练数据集。具体来说,可以对样本图像进行左右翻转、饱和度和色度拉伸、噪声添加、模糊、顺时针和逆时针分别45度倾斜等数据增强处理,同样地,对图像标签进行上述数据增强处理。
87.此外,除了上述常规的数据增强处理,还可以采用mix-moasic数据增强方法,对所有样本图像和所有图像标签进行数据增强处理,以显著提升深度神经网络模型对超大高清遥感影像的建筑语义分割能力,明显提升分割的精确度。具体地,mix-moasic数据增强方法为,随机从所有的训练数据集中选取四张训练样本,并随机对每一张训练样本进行一定比率的缩放,最后将四张缩放后的训练样本拼接成一张训练样本。其中,每一张训练样本缩放的比率是随机的,也就是说,缩放后的四张训练样本的尺寸大小不一定相同,但是四张缩放后的训练样本拼接得到的训练样本与原先的训练样本尺寸相同,即与预设的样本图像参数尺寸相同。同时,参照图3,拼接得到的训练样本有明显边界线,因此,mix-moasic数据增强方法不仅增加了训练样本的数量,还能够增加图像拼接的样式,使得训练得到的分割
模型能够适应高清遥感图像中各种明显的拼接痕迹,极大地增强模型的泛化能力。
88.步骤s03:构建深度神经网络模型,并利用训练数据集对深度神经网络模型进行训练,得到分割模型。
89.在本实施例中,在构建的深度神经网络模型的基础上,将完成数据增强处理后得到的训练数据集输入至深度神经网络模型,进行模型训练,以更新深度神经网络模型的网络权重,进一步增强深度神经网络模型的泛化能力,提高模型的精度。其中,构建深度神经网络模型时,初始设置为:初始权重为imagenet网络权重,初始学习率为lr,更新学习率的方法为指数下降方法,网络更新权重方法为adam方法,总损失值计算方法为二值交叉熵损失函数。
90.具体地,在将训练数据集中的数据批量输入至深度神经网络模型之后,深度神经网络模型对数据进行特征提取并得到对应的特征图,然后通过多语义多尺度融合的操作处理,更新得到包含多尺度多语义融合的特征图,并相应地提取更新后的特征图中的感兴趣区域和非感兴趣区域。接着,根据提取到的感兴趣区域和非感兴趣区域,计算得到深度神经网络模型输出的总损失值,并以总损失值对深度神经网络权重进行反向传播更新,获得训练完成后的分割模型。
91.步骤s2:分别计算初始建筑物轮廓的第一面积area_a和最小外接矩形的第二面积area_b,将area_a除以area_b并乘以100%,以获得第一面积area_a和第二面积area_b之间的第一比值ratio_1。
92.需要说明的是,当第一比值ratio_1大于等于第一预设值时,执行步骤s3;当第一比值ratio_1小于第一预设值时,执行步骤s4。其中,作为一个举例,ratio_1=80%,ratio_1的数值由多次试验获取,可以根据实际情况进行调整,使得最终的建筑物规则轮廓提取结果与初始建筑物轮廓的第一面积area_a相差较小,以保证建筑物轮廓规则化提取的精度。
93.步骤s3:确定最小外接矩形为最终的建筑物规则轮廓提取结果。
94.步骤s4:根据初始建筑物轮廓和最小外接矩形的交点,划分多个待测区域,并计算各待测区域的第三面积,然后根据各第三面积,确定是否在最小外接矩形的基础上剔除各待测区域对应的最大内接矩形,以获取最终的建筑物规则轮廓提取结果。
95.进一步地,步骤s4具体包括步骤s41至步骤s45,各步骤具体如下:
96.步骤s41:根据初始建筑物轮廓和最小外接矩形的交点,划分多个待测区域,并计算各待测区域的第三面积area_c。
97.作为一种举例,请参照图4,以最小外接矩形的左上顶点o为坐标原点,以最小外接矩形的左上顶点o的两条相邻垂直边为坐标轴,建立新坐标系,并假设初始建筑物轮廓和最小外接矩形的四个交点为a、b、c、d,此时初始建筑物轮廓的边缘、最小外接矩形和交点a、b、c、d分别组成四个待测区域1、2、3、4,并计算各待测区域的第三面积area_c。
98.其中,根据不同的遥感影像,获取得到的初始建筑物轮廓也不同,初始建筑物轮廓和最小外接矩形的交点数量也会随之变化。因此,对于交点的假设与待测区域的划分也会适应性地调整。
99.步骤s42:计算第一面积area_a和第二面积area_b的差值area_delta,并将area_c除以area_delta并乘以100%,以获得各第三面积area_c和差值area_delta之
间的第二比值ratio_2,并根据各第二比值ratio_2和第二预设值的大小关系,确定最终的建筑物规则轮廓提取结果。
100.需要说明的是,若第二比值ratio_2大于等于第二预设值,则执行步骤s43;若第二比值ratio_2小于第二预设值,则执行步骤s44。其中,作为一个举例,ratio_2=25%,ratio_2的数值由多次试验获取,可以根据实际情况进行调整,使得最终的建筑物规则轮廓提取结果与初始建筑物轮廓的第一面积area_a相差较小,进一步保证建筑物轮廓规则化提取的精度。
101.步骤s43:获取当前待测区域对应的最大内接矩形,并在当前最小外接矩形的基础上剔除最大内接矩形,获得更新后的最小外接矩形。
102.作为一种举例,当第二比值ratio_2大于等于第二预设值时,利用动态规划方法,获取待测区域1的最大内接矩形。其中,请参照图4,该最大内接矩形的其中一个顶点o为最小外接矩形的左上顶点o,该最大内接矩形的顶点o相邻两条垂直边为最小外接矩形的交点a、b所在两条垂直边,该最大内接矩形与初始建筑物轮廓的ab段的交点为与顶点o不相邻的另一顶点e,并假设该最大内接矩形的另外两个顶点分别为f和g。最后用线段afegb代替初始建筑物轮廓中的aeb曲线(即在当前最小外接矩形的基础上剔除最大内接矩形ofeg),获得更新后的最小外接矩形。
103.其中,动态规划方法具体为:以o为顶点,分别设置oa反向的边长为1,ob方向的边长为1,然后不断增加oa方向和ob方向的边长来计算矩形的面积,直至找到面积最大的矩形,即为最大内接矩形。
104.步骤s44:在当前最小外接矩形的基础上保留当前待测区域,获得更新后的最小外接矩形。
105.作为一种举例,当第二比值ratio_2小于第二预设值时,在当前最小外接矩形的基础上保留当前待测区域,请参照图4,例如对于待测区域3,直接用待测区域3的线段边缘代替对应的初始建筑物轮廓中的曲线边缘,获得更新后的最小外接矩形。
106.步骤s45:在完成对所有待测区域的处理并获得更新后的最小外接矩形之后,将当前最小外接矩形作为最终的建筑物规则轮廓提取结果。
107.作为一种举例,在完成对所有待测区域的处理并获得更新后的最小外接矩形之后,得到的结果请参照图4。
108.为了解决相同的技术问题,请参照图5,本发明还提供了一种基于深度学习的建筑物规则轮廓的提取系统,包括:
109.预处理模块1,用于按照预设的获取规则,根据第一遥感影像,获取对应的初始建筑物轮廓,并根据初始建筑物轮廓,获得初始建筑物轮廓对应的最小外接矩形;
110.计算模块2,用于分别计算初始建筑物轮廓的第一面积和最小外接矩形的第二面积,以获得第一面积和第二面积之间的第一比值;
111.第一轮廓提取模块3,用于当第一比值大于等于第一预设值时,确定最小外接矩形为最终的建筑物规则轮廓提取结果;
112.第二轮廓提取模块4,用于当第一比值小于第一预设值时,根据初始建筑物轮廓和最小外接矩形的交点,划分多个待测区域,并计算各所述待测区域的第三面积,然后根据各所述第三面积,确定是否在所述最小外接矩形的基础上剔除各所述待测区域对应的最大内
接矩形,以获取最终的建筑物规则轮廓提取结果。
113.进一步地,请参照图5,基于深度学习的建筑物规则轮廓的提取系统,还包括:
114.模型训练模块5,用于获取多个第二遥感影像,并根据各第二遥感影像,分别获取各第二遥感影像对应的二值图像;其中,一个第二遥感影像对应一个二值图像;按照预设的样本图像参数,分别对各第二遥感影像和各二值图像进行随机裁剪,得到若干个第二遥感影像对应的样本图像,以及若干个二值图像对应的图像标签,并对所有样本图像和所有图像标签进行数据增强处理,以获得训练数据集;其中,一个样本图像对应一个图像标签;构建深度神经网络模型,并利用训练数据集对深度神经网络模型进行训练,得到分割模型。
115.进一步地,请参照图6,预处理模块,还包括:
116.特征提取单元,用于将第一遥感影像输入至分割模型,提取第一遥感影像的特征,获得第一遥感影像对应的第一特征图;
117.特征融合单元,用于对第一特征图进行多语义多尺度融合,得到第一特征图对应的第二特征图;
118.预测单元,用于按照预设的规则,对第二特征图进行预测,得到对应的第一二值图像;
119.预处理单元,用于对第一二值图像依次进行腐蚀和膨胀的滤波预处理,得到对应的第二二值图像;其中,第二二值图像包含初始建筑物轮廓;
120.第三轮廓提取单元,用于根据初始建筑物轮廓,获得初始建筑物轮廓对应的最小外接矩形。
121.进一步地,请参照图7,第二轮廓提取模块,还包括:
122.数据处理单元,用于计算第一面积和第二面积的差值,并计算各第三面积和差值之间的第二比值;
123.第一轮廓提取单元,用于若当前第二比值大于等于第二预设值,则获取当前所述待测区域对应的最大内接矩形,并在当前所述最小外接矩形的基础上剔除所述最大内接矩形,获得更新后的最小外接矩形;
124.第二轮廓提取单元,用于若当前第二比值小于第二预设值,则在当前所述最小外接矩形的基础上保留当前所述待测区域,获得更新后的最小外接矩形;
125.结果获取单元,用于在完成对所有待测区域的处理并获得更新后的最小外接矩形之后,将当前最小外接矩形作为最终的建筑物规则轮廓提取结果。
126.所属领域的技术人员可以清楚地了解到,为描述的方便和简洁,上述描述的系统的具体工作过程,可以参考前述方法实施例中的对应过程,在此不再赘述。
127.相比于现有技术,本发明实施例具有如下有益效果:
128.本发明提供了一种基于深度学习的建筑物规则轮廓的提取方法及系统,通过获取初始建筑物轮廓对应的最小外接矩形,初步对第一遥感影像中粗略的初始建筑物轮廓进行规则化处理。并且,在最小外接矩形与初始建筑物轮廓的面积相差较大时,根据最小外接矩形与初始建筑物轮廓的交点划分多个待测区域,并根据待测区域的面积确定是否在最小外接矩形的基础上剔除待测区域对应的最大内接矩形,进一步优化第一遥感影像中建筑物的轮廓,提升建筑物轮廓规则化提取的精度。
129.进一步地,本发明还利用分割模型对第一遥感影像进行分割处理,并对分割结果
进行腐蚀和膨胀的滤波预处理,消除干扰噪声,填充空洞点,优化初始数据,进一步提升建筑物规则轮廓提取的精度;其中,分割模型是利用训练数据集对深度神经网络模型进行训练而获得的,使得分割模型能够适应多种类型的遥感影像,增强模型的泛化能力。
130.以上所述的具体实施例,对本发明的目的、技术方案和有益效果进行了进一步的详细说明,应当理解,以上所述仅为本发明的具体实施例而已,并不用于限定本发明的保护范围。特别指出,对于本领域技术人员来说,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1