用于分散混合空地自主最后一英里货物递送的系统和方法与流程
1.本公开总体涉及无人驾驶飞行器管理系统和方法。
背景技术:
2.使用无人驾驶飞行器(uav)的最后一英里递送可能涉及诸如舰队管理和路线分配等因素。递送车辆可以被配置为支持多个uav或uav舰队。然而,递送车辆的移动性可能会影响uav的递送操作。例如,与递送车辆相关联的无人机舰队可以被分配至不同的递送路线。这些递送路线或目的地可能彼此远离,使得一些uav难以返回到递送车辆。此外,uav的操作范围可能受到限制。这些问题在多个递送车辆和uav舰队可能正在操作的场景中增加。
技术实现要素:
3.本公开总体涉及uav(例如,无人机)管理系统和方法。例如,本公开的系统和方法可以启用实时无人机到站分配,其中无人机(诸如,uav)可以从第一平台发射、递送包裹并且返回到所述第一平台或当所述第一平台不可用时分配给所述无人机的另一个平台。
4.在一些情况下,本文的系统和方法可以确定如何管理递送无人机的车队。在递送之后,无人机可以对接回原始递送车辆或对接在其他地方,诸如另一个递送车辆或固定对接站。无人机可以被配置为在空中上升到指定高度以获得附近潜在车辆的视线。然后,无人机启动发现阶段以获得关于所有可用的范围内对接/充电站的信息。然后,它向可发现/发现的站无线地广播“请求”,其中所述“请求”具有关于无人机的当前状态(位置、剩余电量等)的信息。
5.一旦递送车辆接收到该请求,递送车辆就可以向无人机分配指示递送车辆有多迫切地需要无人机的优先数,并且将该数字包括在其返回给无人机的“响应”中。可以基于可用对接站、车辆中的剩余可递送货物、车辆的未来轨迹等中的任一个或多个来计算该优先数。无人机可以从范围内的车辆接收多个响应。然后,无人机可以选择具有最高优先级的递送车辆并且将“选择”消息发送回该特定递送车辆。然后,通过递送车辆将确认消息发送至无人机来闭环。在确认消息中,递送车辆通知无人机有关估计的对接位置。然后,无人机可以开始到其指定站的行程。当在空中时,无人机可以与车辆就其位置进行通信。如果由于不可预见的情况(诸如交通状况)需要更新对接位置/时间,则使用情景感知算法计算新的对接站/时间并且将其发送至无人机。
附图说明
6.关于附图阐述具体实施方式。使用相同的附图标记可以指示类似或相同的项。各种实施例可以利用除了附图中示出的那些之外的元件和/或部件,并且一些元件和/或部件可能不存在于各种实施例中。附图中的元件和/或部件不一定按比例绘制。在整个本公开中,根据上下文,单数和复数术语可以可互换使用。
7.图1a示出了可以实践本公开的系统和方法的示例性架构。
8.图1b示意性地示出了根据本公开配置的示例性无人机和车辆。
9.图2是本公开的分散式递送车辆选择过程的示例性示意性流程。
10.图3是本公开的示例性方法的流程图。
11.图4是本公开的另一示例性方法的流程图。
12.图5是本公开的又一示例性方法的流程图。
具体实施方式
13.图1a描绘了可以实现用于提供本文公开的系统和方法的技术和结构的说明性架构100。架构100可以包括一个或多个车辆102a-102n、一个或多个无人机104a-104n、固定对接站106(可以存在一个以上的固定对接站)和网络108。网络108可以包括任何公共和/或私用网络,其可以包括远程和短程无线通信以及蜂窝网络等。图1a中所示的元件中的任一个可以使用网络108进行通信。
14.共同参考图1a和图1b,车辆中的一个示例性车辆诸如车辆102a可以包括车辆控制器110,其具有处理器112和用于存储可执行指令的存储器114,处理器112可以执行存储在存储器114中的指令以执行本文所公开的分散式无人机到站功能中的任一个,诸如调度无人机以进行递送、处理无人机元数据以及计算响应代码-仅举几例。当提及由车辆控制器110执行的操作时,应当理解,这包括由处理器112执行存储在存储器114中的指令。车辆102a还可以包括对接站116。如上所述,对接站116可以具有用于任何数量的无人机的对接/充电站118a-n。就上下文而言,对接站的空心x指示对接件未被占用,而实心x则指示对接站的对接件被无人机占用。车辆102a可以包括通信模块120,其允许车辆控制器110通过网络108与其他物体(诸如,其他递送车辆或无人机)通信。
15.作为无人机中的示例性无人机,诸如无人机104a可以包括无人机控制器122,其具有处理器124和用于存储可执行指令的存储器126,处理器124可以执行存储在存储器126中的指令以执行本文所公开的分散式无人机到站的功能中的任一个。当提及由无人机控制器122执行的操作时,应当理解,这包括由处理器124执行存储在存储器126中的指令。这些指令可以允许无人机执行导航和包裹递送功能,以及对接站发现。无人机104a还可以包括通信模块128,其允许无人机控制器122通过网络108与车辆、其他无人机或固定对接站通信。
16.图1a还示出了最后一英里货物递送130区域中一个或多个无人机104a-104n到一个或多个车辆102a-102n的管理和分配。部署以略图示出的无人机,诸如无人机104a,同时无人机104b与车辆102a的对接站对接。
17.在这种情境中,可以调度车辆和无人机以将货物递送至住宅区中的多个位置。在这种情境中,一个或多个车辆102a-102n中的每一个可以配备有多个无人机对接/充电站。例如,车辆102a可以具有一个或多个对接/充电站118a-n。作为示例,对接/充电站可以位于车辆102a的车顶上。任何无人机在完成递送后都可以被分配到任何范围内的对接/充电站。也就是说,无人机(诸如无人机104a)可以被配置为找到固定对接站106或一个或多个车辆102a-102n中的任一个上的任何对接站。
18.关于使用哪个对接站的确定可以由无人机做出和/或与操作区域中的其他无人机或车辆协作做出。也就是说,无人机可以执行用于无人机到站分配的分散式算法,其允许无人机确定其应该着陆的位置。在一些情况下,对接站是车辆上的移动对接站。在其他情况
下,对接站是固定对接站。在一些情况下,无人机可以在没有与服务提供商的任何回程连接或一个或多个车辆102a-102n之间的协调的情况下发挥作用。
19.无人机104a可以从车辆102a调度(发射或离开)。无人机104a可以被配置为将包裹或其他物体递送至接收者。在发射之前,无人机104a可以存储最近的固定对接站(诸如对接站106)的位置。无人机104a可以与该区域中的其他无人机通信或直接与车辆102a通信以将无人机元数据报告给车辆102a。在一些情况下,在递送之后,无人机104a可以被配置为上升到发现高度以允许与该区域中的车辆进行视线通信。
20.现在共同地参考图1a、图1b和图2,无人机104a可以广播无人机元数据rd(例如,在递送请求中),诸如当前位置ld、剩余荷电状态(与剩余里程相关)bd和无人机类型/型号d
t
。车辆102a或其他车辆(诸如车辆102b和车辆102c)接收广播的无人机元数据rd。
21.车辆102a、102b和102c中的每一个可以基于以下中的一个或多个计算响应代码c
vi
:无人机元数据rd、车辆位置lv、可用的对接站sv、要递送的剩余货物/包裹gv、剩余货物的优先级pv和/或车辆未来路线rv。在一些情况下,所考虑的其他变量可以包括但不限于对车辆上的无人机进行充电的能力(一些或所有对接站具有该能力)、在递送车辆上的可用无人机对接站的数量、无人机至附近的递送车辆的距离、无人机到最近的固定站的距离以及货物/包裹的递送优先级-仅举几例。在一个示例中,无人机104a可以基于一个或多个因素来优先考虑其应该在哪里着陆。例如,如果无人机104a的荷电状态太低而不允许无人机104a与选择的车辆会合,则无人机104a可以选择一个车辆而不是另一个车辆(或可能是固定对接站106)。
22.如所指出的,每个车辆可以计算响应代码c
vi
。车辆可以各自将它们的响应代码c
vi
传输到无人机104a。在一个示例中,无人机可以选择具有最高响应代码c
vi
的车辆并且将单播“选择”消息发送回该特定车辆。在该示例中,选择第二车辆102b。车辆102b接收选择消息并且估计对接位置和对接时间。然后将该元组(估计的对接位置、估计的对接时间)传输到无人机104a。一些估计过程可以考虑多于两个变量。
23.当被接收到时,无人机104a可以开始在车辆102b的对接站处着陆的过程。传送到无人机104a的对接位置不仅可以指示车辆102b和无人机104a可以相遇的地理位置,而且还可以指示车辆102a的对接站的可用或开放对接件。对接时间指示无人机104a和车辆102b可能相遇的当前或未来的时间。
24.如上所述,无人机104a和车辆102a可以各自实时或近实时地彼此共享它们的位置。这允许其他无人机和车辆在其他已经调度的无人机当前正在递送货物时自由地穿越和执行额外的递送。因此,在调度无人机之后,车辆不需要等待无人机或跟随无人机到达无人机的目的地,以便无人机继续操作。
25.无人机104a存储固定对接站106的位置。如果需要,无人机104a可以选择着陆在固定对接站106上而不是车辆102b上。例如,如果车辆102b被延迟并且不能在确定的位置和确定的时间与无人机相遇,则无人机104a可以选择着陆在固定对接站106上。
26.图3是示例性方法的流程图。所述方法包括无人机分配的第一过程。所述方法可以包括步骤302:接收请求,由此在递送之后,每个无人机将具有无人机元数据的对接请求发送至附近的递送车辆(无人机元数据可以包括无人机电池寿命/续航里程、位置、大小等)。所述方法还可以包括从已经接收到无人机请求的附近递送车辆接收响应的步骤304。车辆
可以基于它们的参数(诸如优先级、载荷、路线等)来计算响应。
27.所述方法还包括步骤306:基于接收的响应选择递送车辆并且向选定的车辆发出选择消息。所述方法可以包括步骤308:从选定的递送车辆接收确认消息。确认消息可以包括关于无人机可以在何地和何时与车辆对接的信息(例如,估计的对接位置)。
28.所述方法可以包括步骤310:在无人机与车辆之间交换情景感知数据。无人机可以传输无人机的当前位置,并且车辆可以传输针对无人机的更新的估计对接时间(也可以包括位置的更新)。
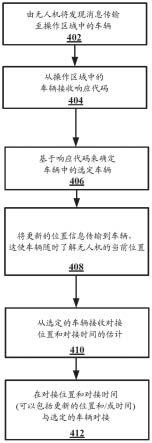
29.图4是示例性方法的流程图。所述方法是在无人机将包裹递送至目的地的背景下执行的。无人机从移动递送车辆进行操作。所述方法可以包括步骤402:由无人机将发现消息传输至操作区域中的车辆。车辆可以包括发射无人机的车辆和可能在操作区域内的也被配置为接收无人机的其他车辆。
30.所述方法可以包括步骤404:从操作区域中的车辆接收响应代码。响应代码可以由接收发现消息的每个车辆计算。发现消息可以包括无人机元数据,诸如无人机位置、剩余电池寿命(无人机电池的soc)和无人机类型/型号。响应代码还可以基于车辆特定数据,诸如车辆的位置、车辆的可用对接站、要递送的剩余物品以及车辆的车辆路线。无人机可以选择具有最高值响应代码的车辆。因此,所述方法可以包括步骤406:基于响应代码来确定车辆中的选定车辆。
31.所述方法可以包括步骤408:将更新的位置信息传输到车辆,这使车辆随时了解无人机的当前位置。所述方法还可以包括步骤410:从选定的车辆接收对接位置和对接时间的估计。对接位置和/或时间可以根据需要随时间更新。在一些情况下,所述方法包括步骤412:在对接位置和对接时间(可以包括更新的位置和/或时间)与选定的车辆对接。
32.所述方法还可以包括步骤,诸如确定无人机元数据,包括无人机位置、无人机电池的荷电状态以及无人机类型或型号中的任一个或多个,以及组装包括无人机元数据的发现消息的步骤。
33.在一些情况下,所述方法可以包括确定响应代码中排名最高的响应代码的步骤。可以肯定的是,排名最高的响应代码与选定的车辆相关联。作为响应,无人机可以将统一码选择消息传输至选定的车辆。
34.所述方法还可以包括当从车辆中的第一车辆调度无人机时,接收最近的固定对接站的位置的步骤。在无人机离开车辆进行递送之前,可以接收最近的固定对接站的位置并且将其存储在无人机中。
35.图5是本公开的方法的另一个示例性流程图。所述方法可以包括步骤502:由无人机将物体递送至一个位置。应当理解,可以从车辆的对接站调度无人机。接下来,所述方法可以包括步骤504:由无人机接收最近的固定对接站的位置。同样,在一些情况下,该步骤可以在步骤502之前发生。
36.所述方法还可以包括步骤506,其中在物体的递送之后,可以执行将发现消息传输至操作区域中的可用车辆的步骤。可以肯定的是,发现消息可以包括无人机元数据。在一些情况下,所述方法可以包括步骤508:选择以下中的至少一个:(1)基于从可用车辆接收的响应代码的可用车辆中的一个;和/或(2)最近的固定对接站。再者,例如,如果选定的车辆不可用或者无人机需要立即充电或维修,则无人机可以利用最近的固定对接站。
37.本文公开的系统、设备、装置和方法的实现方式可包括或利用专用或通用计算机,所述专用或通用计算机包括计算机硬件,例如像如本文所讨论的一个或多个处理器和系统存储器。计算机可执行指令包括例如在处理器处执行时致使通用计算机、专用计算机或专用处理装置执行某个功能或某组功能的指令和数据。本文公开的装置、系统和方法的实现方式可以通过计算机网络进行通信。“网络”被定义为使得能够在计算机系统和/或模块和/或其他电子装置之间传输电子数据的一个或多个数据链路。
38.尽管已经用特定于结构特征和/或方法动作的语言描述了本主题,但是应理解,在所附权利要求中限定的主题不必限于上面描述的所述特征或动作。而是,所描述的特征和动作被公开作为实施权利要求的示例性形式。
39.尽管上文已经描述了本公开的各种实施例,但是应理解,这些实施例仅通过示例而非限制的方式呈现。相关领域的技术人员将明白,在不脱离本公开的精神和范围的情况下可进行形式和细节上的各种改变。因此,本公开的广度和范围不应受上述示例性实施例中的任一者的限制,而是应仅根据所附权利要求及其等效物来限定。已经出于说明和描述目的而呈现了前述描述。前述描述并不意图是详尽的或将本公开限制于所公开的精确形式。鉴于以上教导,许多修改和变化形式是可能的。此外,应注意,前述可选实现方式中的任一者或全部可按任何所期望的组合使用,以形成本公开的附加混合实现方式。例如,相对于特定装置或部件描述的任何功能可以通过另一个装置或部件来执行。除非另有特别说明或在使用时在上下文内以其他方式理解,否则诸如尤其是“能够”、“可能”、“可以”或“可”的条件语言通常意图表达某些实施例可能包括某些特征、元件和/或步骤,而其他实施例可不包括某些特征、元件和/或步骤。因此,此类条件语言一般并不意图暗示一个或多个实施例无论如何都需要各特征、元件和/或步骤。
40.根据本发明的一个实施例,所述处理器被配置为从所述可用车辆中的所述一个接收对接位置和对接时间的估计。
41.根据实施例,所述处理器被配置为根据无人机位置、无人机电池的荷电状态以及无人机的类型或型号中的任一个或多个确定所述无人机元数据。
42.根据实施例,所述处理器被配置为确定所述响应代码中排名最高的响应代码,所述排名最高的响应代码与所述可用车辆中的所述一个相关联;以及将统一码选择消息传输至所述可用车辆中的所述一个。
43.根据实施例,所述处理器被配置为当所述无人机在空中时,将所述无人机的当前位置传输至所述车辆中的每一个。
44.根据实施例,所述处理器被配置为基于所述无人机的所述当前位置来更新对接位置和对接时间。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1