未知噪声下的变分贝叶斯强跟踪PHD多目标跟踪方法
未知噪声下的变分贝叶斯强跟踪phd多目标跟踪方法
技术领域
1.本发明涉及信息融合技术领域,尤其涉及一种未知噪声下的变分贝叶斯强跟踪phd多目标跟踪方法。
背景技术:
2.传统的多目标跟踪方法在跟踪多个目标时需要进行数据关联,但是它们只能处理目标数目固定的情况,随着目标数的增加,一些算法的计算量呈指数级增长,严重影响实时性。概率假设密度滤波器为多目标后验概率密度分布的一阶矩近似估计状态,来避免数据关联。现有phd滤波器的闭式解主要有粒子滤波phd、高斯混合phd滤波器。然而,这些算法仅在测量噪声方差已知的多目标跟踪系统中有较好的性能。
3.在真实的跟踪场景中,测量噪声的方差通常是未知的和时变的。近年来针对噪声统计量未知的问题,变分贝叶斯近似方法被应用于测量噪声方差未知的线性高斯系统的状态估计。变分近似过程中有采用逆伽马分布或是逆威沙尔特分布逼近不确定的量测噪声,但真实场景下不仅测量噪声而且过程噪声通常也是未知的不精确的。
技术实现要素:
4.针对上述问题,本发明提出一种未知噪声下的变分贝叶斯强跟踪phd多目标跟踪方法能够提高不确定系统模型的跟踪精度和计算效率。
5.本发明采用的技术方案为:
6.为实现上述目标,具体步骤如下:
[0007][0008][0009][0010]
式中,分别为在k时刻第j个目标变分迭代为n+1次的iw分布参数;分别为k时刻预测的iw分布参数;zk和hk为在k时刻分别为量测集合和观测矩阵;和在k时刻第j个目标变分迭代n次的目标状态和状态协方差。
[0011]
步骤3-3,利用变分更新后的量测噪声协方差对目标状态、目标状态协方差,以及目标所对应的权重持续进行变分估计。
[0012][0013]
[0014][0015][0016]
式中,κk(z)为杂波强度;i为单位阵;为残差序列;为被渐消因子修正后的预测目标状态估计协方差;为卡尔曼增益。
[0017]
步骤3-4,判断状态量是否满足迭代终止的条件,
[0018][0019]
表示第j个目标在n+1次迭代后的目标状态值;则表示第j个目标在n次迭代后的目标状态值;ε表示为一个很小的常数。
[0020]
本发明具有以下优点:
[0021]
(1)引入强跟踪原理,通过衰减因子一步预测误差协方差矩阵来增强卡尔曼滤波中新息或者说观测的作用,修正过程噪声的不精确对状态协方差的影响。
[0022]
(2)引入变分贝叶斯方法,选取iw分布为共轭分布,对不确定噪声进行变分迭代近似,通过最小化kl散度来逼近后验概率密度。可有效地提高跟踪精度和计算时间效率。
附图说明
[0023]
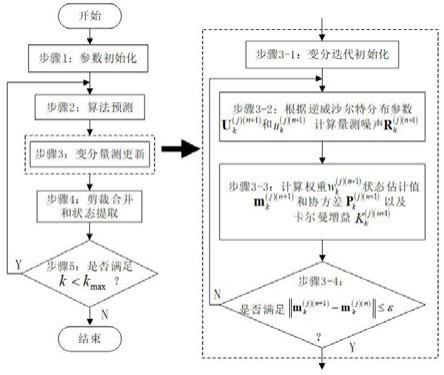
图1是本发明的流程图。
具体实施方式
[0024]
本发明涉及的基础理论进行如下介绍:
[0025]
1变分贝叶斯近似推理技术
[0026]
为估计量测噪声协方差rk和目标状态xk,假设它们是相互独立的,且根据贝叶斯规则需要对联合后验概率密度函数(pdf)p(xk,rk|z
1:k
)进行计算。计算公式如下:
[0027][0028]
其中gk(zk|xk,rk)为有关xk和rk的似然函数;p
k|k-1
(xk,rk|z
1:k-1
)为xk和rk的联合预测pdf。由于rk未知性后验pdf难以获得解析解,为计算方便用vb近似对p(xk,rk|z
1:k
)寻找自由形式的近似参数分布,
[0029]
p(xk,rk|z
1:k
)≈q(xk)q(rk)
[0030]
式中,q(
·
)表示真实p(
·
)的近似后验pdf;q(xk)和q(rk)是通过最小化近似后验pdf与真实后验pdf之间的kld散度得到,
[0031]
{q(xk),q(rk)}=argminkld(q(xk)q(rk)‖p(xk,rk|z
1:k
))
[0032]
q(xk)和q(rk)的变分参数是耦合的,采用定点迭代求解,迭代收敛到局部最优。
[0033][0034]
[0035]
其中n为变分迭代次数的最大值;为带自由度参数和逆尺度矩阵的iw概率密度函数;为均值为和协方差的高斯概率密度函数。
[0036]
2.强跟踪原理
[0037]
强跟踪原理中引入渐消因子ηk对状态预测协方差p
k∣k-1
的调整从而可以实时的修正增益kk,迫使残差序列正交。修正后的状态预测协方差为:
[0038][0039]
渐消因子ηk可以定义为
[0040][0041]
tr[
·
]表示为矩阵求迹;β为弱化因子;f
k-1
、h
k-1
、q
k-1
分别为k-1时刻的状态转移矩阵,观测矩阵和过程噪声协方差矩阵。输出残差序列的协方差vk为
[0042][0043]
式中,γk为残差序列;ζ为变化因子;v
k-1
表示k-1时刻的残差序列协方差。
[0044]
本发明提出一种基于变分贝叶斯强跟踪phd滤波的未知噪声多目标跟踪方法,包括如下步骤:
[0045]
步骤1,令初始化时刻k=0,初始化参数:目标状态其中和是第j个目标状态估计值和状态估计协方差;场景参数为其中和分别为量测和过程噪声协方差矩阵,zk为传感器对目标产生的量测值,观测矩阵,变分迭代次数,状态转移矩阵,和为iw分布的逆尺度矩阵和自由度;
[0046]
步骤2,当k≥1,对k-1时刻的目标状态矢量进行k时刻预测,本专利引入强跟踪原理的渐消因子它对状态估计协方差进行实时修正,修正后的状态预测协方差不仅使得跟踪性能提高,也降低过程噪声对估计结果的影响,提高不确定性系统的鲁棒性。随之生成预测后的目标状态矢量
[0047]
对于步骤2对k-1时刻的目标状态矢量进行k时刻预测,并使用强跟踪原理引入渐消因子对状态估计协方差进行实时修正。随之生成预测后的目标状态矢量按下述步骤计算得到:
[0048]vk∣k-1
(x,r)=v
s,k∣k-1
(x,r)+v
β,k∣k-1
(x,r)+δk(x,r)
[0049]
式中,v
s,k∣k-1
(x,r)为从k-1时刻持续存活到k的目标强度;v
β,k∣k-1
(x,r)为衍生目标强度;δk(x,r)新生目标的强度。
[0050]
步骤2-1,v
s,k∣k-1
(x,r)可由下式计算所得:
[0051][0052]
其中,p
s,k
目标存活概率;j
k-1
为k-1时刻的高斯分量;为高斯分量所对应的权重,其和为k-1时刻估计的目标个数;是存活目标均值协方差的高斯分布;是存活目标自由度参数逆尺度矩阵的iw分布。giw联合分布的参数的iw分布。giw联合分布的参数
[0053][0054][0055][0056][0057]
式中,为第j个存活目标修正后存活目标的状态预测协方差;为渐消因子;ρ为遗忘因子;dr表示为测量噪声协方差矩阵维度。本专利引入的强跟踪原理,通过对状态预测协方差p
k∣k-1
调整从而可以实时的修正增益kk,迫使残差序列正交并抵抗不确定过程噪声导致的性能下降,这样不仅增强了滤波中新息或者说观测的作用,而且修正过程噪声的不精确对状态协方差的影响。渐消因子的具体公式如下所示:
[0058][0059]
其中,为残差序列协方差;β为弱化因子,使估计结果更加平滑;rk为k时刻的量测噪声协方差;f
k-1
、h
k-1
、q
k-1
分别为k-1时刻的状态转移矩阵,观测矩阵和过程噪声协方差矩阵。
[0060]
步骤2-2,衍生目标强度v
β,k∣k-1
(x,r)可表示为:
[0061][0062]
其中,为第l个衍生目标的权重;giw联合分布中由第j个目标衍生的第l个目标的参数经下式计算可得:
[0063][0064][0065]
[0066][0067]
其中,和分别为k-1时刻的衍生目标的状态转移矩阵和目标状态;为k时刻衍生目标的渐消因子;为k-1时刻的过程噪声协方差;iw分布在k-1时刻衍生目标的自由度参数和逆尺度矩阵
[0068]
步骤2-3,新生目标强度δk(x,r)可表示为:
[0069][0070]
步骤3,依据传感器生成的量测集zk,利用变分贝叶斯近似进行次迭代,选择iw分布联合和对未知量测噪声协方差进行近似;根据近似后的和预测状态矢量计算权重采用高斯卡尔曼滤波获求解和卡尔曼增益
[0071]
对于步骤3目标更新强度phd的形式表示,按下列步骤计算得
[0072][0073]
其中,p
d,k
为检测概率,v
k∣k-1
(x,r)为在k时刻预测后的phd;具体计算流程由步骤3-2进行推导;
[0074]
步骤3-1,将步骤2中所预测的目标状态矢量作为变分更新的初始值。
[0075]
步骤3-2,根据预测状态矢量进行变分迭代次。对第j个目标变分迭代为n+1次的量测噪声协方差的具体更新方法如下:
[0076][0077][0078][0079]
式中,分别为在k时刻第j个目标变分迭代为n+1次的iw分布参数;分别为k时刻预测的iw分布参数;zk和hk为在k时刻分别为量测集合和观测矩阵;和在k时刻第j个目标变分迭代n次的目标状态和状态协方差。
[0080]
步骤3-3,利用变分更新后的量测噪声协方差对目标状态、目标状态协方差,以及目标所对应的权重持续进行变分估计。
[0081][0082][0083][0084][0085]
式中,κk(z)为杂波强度;i为单位阵;为残差序列;为被渐消因子修正后的预测目标状态估计协方差;为卡尔曼增益。
[0086]
步骤3-4,判断状态量是否满足迭代终止的条件,
[0087][0088]
表示第j个目标在n+1次迭代后的目标状态值;则表示第j个目标在n次迭代后的目标状态值;ε表示为一个很小的常数。
[0089]
步骤4,根据每个目标的删除低于门限的删除低于门限的分量;其次对合并后的分量提取权重大于0.5所对应的其余分量。
[0090]
步骤5,直至k=k
max
目标跟踪结束,否则,转至步骤二持续目标跟踪。
[0091]
本发明的优势主要是引入强跟踪原理,通过衰减因子来进一步修正状态估计协方差矩阵来增强卡尔曼滤波中新息或者说观测的作用,修正过程噪声的不精确对状态协方差的影响;利用逆威沙尔特分布和高斯乘积联合分布近似联合后验分布,采用vb近似技术推导鲁棒phd滤波迭代,通过最小化kl散度来逼近后验概率密度;进而可有效地提高跟踪精度和计算时间效率。
[0092]
需要说明的是,本技术的说明书和权利要求书中的术语“第一”、“第二”等是用于
[0093]
区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本技术的实施例。此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
[0094]
注意,上述仅为本发明的较佳实施例及运用技术原理。本领域技术人员会理解,本发明不限于这里所述的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整和替代而不会脱离本发明的保护范围。因此,虽然通过以上实施例对本发明进行较详细的说明,但本发明不限于这里所述的特定实施例,在不脱离本发明构思的情况下,还可以包括更多其他等有效实施例,而本发明的范围由所附的权利要求范围决定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1