基于图像处理的绝缘子金具修整方法及系统与流程
1.本技术涉及图像识别领域,具体涉及一种基于图像处理的绝缘子金具修整方法及系统。
背景技术:
2.随着社会经济的发展、城镇化进程的推进,电力需求也随之提升,因而需求越来越多的电力传输线路来保障电力的需求。作为保障电力安全传输的绝缘子金具也需保障其能够高质量生产出来,杜绝因其缺陷造成电力传输线路不能正常运行,同时还防止高空作业工人因零部件的缺陷问题无法将绝缘子高效、高质量的安装在电力传输线路上。由于金具生产过程中需要使用攻丝工艺,使得生产的金具中的螺纹容易发生尖角、毛刺缺陷,同时作为电力传输线路上的重要零部件,当金具中存在毛刺时,容易造成电晕现象,同时还会影响到绝缘子的装配效率,甚至会造成无法装配的现象。
3.同时,在对金具中存在的缺陷进行修复前,首先需要确定其中存在缺陷的位置,即及时发现生产过程中金具中可能存在的毛刺缺陷,以便对金具中存在毛刺缺陷的部位进行修复处理,现有技术中针对金具中存在的毛刺缺陷的识别,主要利用边缘检测以及全局阈值分割的方法。
4.发明人在实现本发明实施例的过程中,发现背景技术中至少存在以下缺陷:金具中的螺纹本身有一定的纹理变化,因而利用边缘检测很难直接而准确地定位出毛刺区域,同时由于毛刺缺陷的结构并不规整,其灰度取值较宽,利用全局阈值分割方法得到的分割结果的准确率有待提高。
技术实现要素:
5.针对上述技术问题,本发明提供了一种基于图像处理的绝缘子金具修整方法及系统,能够实现对生产过程中的金具中存在的毛刺缺陷的检测,并对金具中存在毛刺缺陷的部位进行修复处理,同时提高了对金具中存在的毛刺缺陷的检测效率及准确率。
6.第一方面,本文发明实施例提出了一种基于图像处理的绝缘子金具修整方法,包括:
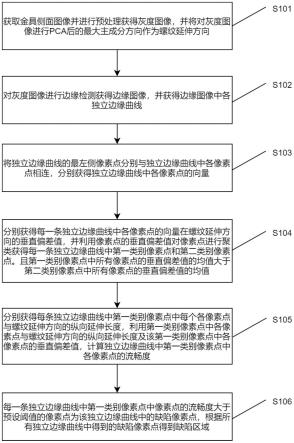
7.获取金具侧面图像并进行预处理获得灰度图像,并将对所述灰度图像进行pca后的最大主成分方向作为螺纹延伸方向。
8.对所述灰度图像进行边缘检测获得边缘图像,并获得所述边缘图像中所有独立边缘曲线。
9.将每一条独立边缘曲线的最左侧像素点分别与独立边缘曲线中各像素点相连,分别获得每一条独立边缘曲线中各像素点的向量。
10.分别获得每一条独立边缘曲线中各像素点的向量在所述螺纹延伸方向的垂直偏差值,并利用像素点的垂直偏差值对像素点进行聚类获得每一条独立边缘曲线中第一类别像素点和第二类别像素点。且所述第一类别像素点中所有像素点的垂直偏差值的均值大于
所述第二类别像素点中所有像素点的垂直偏差值的均值。
11.分别获得每条独立边缘曲线中所述第一类别像素点中每个各像素点与螺纹延伸方向的纵向延伸长度,利用第一类别像素点中各像素点与螺纹延伸方向的纵向延伸长度及该第一类别像素点中各像素点的垂直偏差值,计算所述独立边缘曲线中第一类别像素点中各像素点的流畅度。
12.每一条独立边缘曲线中第一类别像素点中像素点的流畅度大于预设阈值的像素点为该独立边缘曲线中的缺陷像素点,根据所有独立边缘曲线中得到的缺陷像素点得到缺陷区域。
13.在一个可行的实施例中,计算所述独立边缘曲线中第一类别像素点中各像素点的流畅度,包括:
[0014][0015]
式中pa为第一类别中第a个像素点的流畅度,y为第一类别中第a个像素点与螺纹延伸方向的纵向延伸长度,q为第一类别中第a个像素点的垂直偏差值,c1为第一类别中像素点的垂直偏差值的均值,c2为第二类别中像素点的垂直偏差值的均值,tanh表示双曲线正切函数,表示超参数。
[0016]
在一个可行的实施例中,像素点的向量在所述螺纹延伸方向的垂直偏差值,是根据螺纹延伸方向的单位向量与像素点的向量之间叉乘的模获得的。
[0017]
根据权利要求1所述的基于图像处理的绝缘子金具修整方法,其特征在于,将所述缺陷像素点组成缺陷区域后,所述方法还包括:对金具在缺陷像素点处的缺陷进行修复处理。
[0018]
在一个可行的实施例中,对金具在缺陷像素点处的缺陷进行修复处理,包括:
[0019]
获得缺陷像素点处螺纹纹路的侧面图像,根据侧面图像中缺陷像素点与该缺陷像素点处的螺纹压顶像素,获取缺陷像素点处的翘起角度。
[0020]
根据缺陷像素点处的翘起角度确定磨头角度,所述磨头角度为磨头相对于螺纹牙侧边线的夹角。
[0021]
根据预设磨削方向与螺纹牙侧边线的交点与取缺陷像素点之间的距离,确定磨头伸出长度。
[0022]
根据磨头角度以及磨头伸出长度控制磨头对缺陷像素点处进行修复处理。
[0023]
在一个可行的实施例中,获取金具侧面图像,包括:
[0024]
多方位采集金具侧面的表面图像并进行拼接处理得到金具侧面图像,所述金具侧面图像中包括金具的完整侧面。
[0025]
在一个可行的实施例中,对金具侧面图像进行预处理获得灰度图像,包括:
[0026]
对所述金具侧面图像进行图像分割获得金具螺纹图像,所述金具螺纹图像中背景部分的像素值为0。
[0027]
对所述金具螺纹图像进行灰度化获得灰度图像。
[0028]
在一个可行的实施例中,对所述金具侧面图像进行图像分割获得金具螺纹图像是通过dnn实现的。
[0029]
在一个可行的实施例中,所述金具为含螺纹的金具。
[0030]
第二方面,本发明实施例提出了一种基于图像处理的绝缘子金具修整系统,包括:存储器和处理器,其特征在于,所述处理器执行所述存储器存储的计算机程序,以实现本发明实施例中基于图像处理的绝缘子金具修整方法。
[0031]
本发明提供了一种基于图像处理的绝缘子金具修整方法及系统,相比于现有技术,本发明实施例的有益效果在于:能够实现对生产过程中的金具中存在的毛刺缺陷的检测,并对金具中存在毛刺缺陷的部位进行修复处理,同时提高了对金具中存在的毛刺缺陷的检测效率及准确率。
附图说明
[0032]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
[0033]
图1是本发明实施例提供的一种基于图像处理的绝缘子金具修整方法的流程示意图。
[0034]
图2是本发明实施例中金具中螺纹的毛刺缺陷的示意图。
具体实施方式
[0035]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0036]
以下描述中,为了说明而不是为了限定,提出了诸如特定系统结构、技术之类的具体细节,以便透彻理解本技术实施例。然而,本领域的技术人员应当清楚,在没有这些具体细节的其它实施例中也可以实现本技术。在其它情况中,省略对众所周知的系统、装置、电路以及方法的详细说明,以免不必要的细节妨碍本技术的描述。
[0037]
术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征;在本实施例的描述中,除非另有说明,“多个”的含义是两个或两个以上。
[0038]
本发明实施例提供了一种基于图像处理的绝缘子金具修整方法,如图1所示,包括:
[0039]
步骤s101、获取金具侧面图像并进行预处理获得灰度图像,并将对灰度图像进行pca后的最大主成分方向作为螺纹延伸方向。
[0040]
步骤s102、对灰度图像进行边缘检测获得边缘图像,并获得边缘图像中所有独立边缘曲线。
[0041]
步骤s103、将每一条独立边缘曲线的最左侧像素点分别与独立边缘曲线中各像素点相连,分别获得每一条独立边缘曲线中各像素点的向量。
[0042]
步骤s104、分别获得每一条独立边缘曲线中各像素点的向量在螺纹延伸方向的垂
直偏差值,并利用像素点的垂直偏差值对像素点进行聚类获得每一条独立边缘曲线中第一类别像素点和第二类别像素点。且第一类别像素点中所有像素点的垂直偏差值的均值大于第二类别像素点中所有像素点的垂直偏差值的均值。
[0043]
步骤s105、分别获得每条独立边缘曲线中第一类别像素点中每个各像素点与螺纹延伸方向的纵向延伸长度,利用第一类别像素点中各像素点与螺纹延伸方向的纵向延伸长度及该第一类别像素点中各像素点的垂直偏差值,计算独立边缘曲线中第一类别像素点中各像素点的流畅度。
[0044]
步骤s106、每一条独立边缘曲线中第一类别像素点中像素点的流畅度大于预设阈值的像素点为该独立边缘曲线中的缺陷像素点,根据所有独立边缘曲线中得到的缺陷像素点得到缺陷区域。
[0045]
本发明的主要目的是:利用计算机视觉技术对采集的多方位绝缘子金具图像进行处理,分割出金具中存在毛刺缺陷的区域,以便对金具中的毛刺进行去除处理。可用于对生产过程中的金具或者使用过程中的金具进行缺陷检测。
[0046]
图2示出了本发明实施例中金具中螺纹的毛刺缺陷的示意图,如图2所示金具中的螺纹部分的毛刺缺陷比较尖锐,存在毛刺缺陷的金具装配在高压传输电路上会造成电晕现象,同时由于该缺陷存在影响螺纹牙的形态,会使得存在螺纹毛刺的金具无法装配。因此,为了防止该缺陷影响高空作业的装配效率,必须采用有效手段将毛刺进行有效去除,且不损伤螺纹。
[0047]
本发明所针对的情景为:首先在磨具加工台四周布置环形轨道,将相机装配在环形轨道上,相机通过在环形轨道上移动来现在多方位的采集金具的图像,通过处理金具图像来分割出螺纹上的毛刺区域,根据毛刺与螺纹牙的位置关系实现智能去除。
[0048]
进一步的,步骤s101、获取金具侧面图像并进行预处理获得灰度图像,并将对灰度图像进行pca后的最大主成分方向作为螺纹延伸方向。具体包括:
[0049]
首先,由于本发明实施例要实现绝缘金具毛刺去除,需要先采集金具的图像,以便后续通过毛刺的特征计算出各像素的毛刺概率,然后根据毛刺与螺纹牙的位置关系对毛刺进行智能去除控制。
[0050]
需要说明的是,由于需要多方位采集金具的侧面图像,所以需要在磨具四周设置环形轨道,将相机安装在支架上,该相机通过在环形轨道上运动来实现多方位采集绝缘子金具图像,确保各方位相机光轴角度与绝缘子金具轴心的夹角垂直,且相机的采集视野主要集中在金具的螺纹处,同时相机绕金具旋转一周能够采集金具完整的侧面图像。
[0051]
需要说明的是,采集到的金具的侧面图像为rgb图像,rgb是一种颜色标准,通过对红(r)、绿(g)、蓝(b)三个颜色通道的变化以及它们相互之间的叠加来得到各式各样的颜色,rgb即是代表红、绿、蓝三个通道的颜色。
[0052]
其次,分割出金具中的螺纹区域,由于相机主要采集的是绝缘子金具螺纹图像,但是螺纹图像中会包含一些背景图像,对金具侧面图像进行图像分割获得金具螺纹图像,得到的金具螺纹图像中背景部分的像素值为0,如此,能够避免背景部分对后续处理过程的影响。
[0053]
需要说明的是,图像分割就是把图像分成若干个特定的、具有独特性质的区域并提出感兴趣目标的技术和过程。它是由图像处理到图像分析的关键步骤。现有的图像分割
方法主要分以下几类:基于阈值的分割方法、基于区域的分割方法、基于边缘的分割方法以及基于特定理论的分割方法等。从数学角度来看,图像分割是将数字图像划分成互不相交的区域的过程。图像分割的过程也是一个标记过程,即把属于同一区域的像素赋予相同的编号。
[0054]
作为一个示例,本发明实施例中是通过dnn(deep neural networks,深度神经网络)实现对金具侧面图像进行图像分割获得金具螺纹图像的。
[0055]
具体的,本发明实施例中dnn网络的相关内容如下:使用的数据集为采集得到的含螺纹的金具的侧面图像数据集。将需要分割的像素共分为两类,即训练集对应标签标注过程为:单通道的语义标签,对应位置像素属于背景类的标注为0,同时由于网络的任务是分类,所有使用的loss(损失)函数为交叉熵损失函数。
[0056]
然后,对所述金具螺纹图像进行灰度化获得灰度图像。将金具螺纹图像中像素点在rgb三个通道中像素值的最大值,作为灰度图像中的像素点的灰度值。
[0057]
最后,对灰度图像进行pca后的最大主成分方向作为螺纹延伸方向,通过pca处理金具的灰度图像,获取特征值最大的第一主成分方向,该方向即为螺纹牙的主要延伸方向,当金具中的螺纹不存在缺陷的情况下,螺纹牙边缘会沿该方向控制在一定夹角范围内。
[0058]
需要说明的是,pca(principal components analysis,主成分分析)是重要的降维方法之一。在数据压缩消除冗余和数据噪音消除等领域都有广泛的应用。其利用正交变换把一系列可能线性相关的变量转换为一组线性不相关的新变量,也称为主成分,从而利用新变量在更小的维度下展示数据的特征。
[0059]
具体的,在空间上,pca可以理解为把原始数据投射到一个新的坐标系统,第一主成分为第一坐标轴,它的含义代表了原始数据中多个变量经过某种变换得到的新变量的变化区间;第二成分为第二坐标轴,代表了原始数据中多个变量经过某种变换得到的第二个新变量的变化区间。这样我们把利用原始数据解释样品的差异转变为利用新变量解释样品的差异。
[0060]
需要说明的是,这种投射方式会有很多,为了最大限度保留对原始数据的解释,一般会用最大方差理论或最小损失理论,使得第一主成分有着最大的方差或变异数。本实施例中最大主成分方向即第一主成分方向,将其作为焊缝的延伸方向。
[0061]
进一步的,步骤s102、对灰度图像进行边缘检测获得边缘图像,并获得边缘图像中所有独立边缘曲线。具体包括:
[0062]
图像的边缘检测是图像处理的一个基本步骤,是图像处理中的一个基本的研究方向和板块。它的主要原理在于识别出数字图像中那些颜色变化或者亮度变化明显的像素点,这些像素点的显著性变化往往代表图像的这部分属性发生了重要变化,其中包括了深度上的不连续、方向上的不连续及亮度上的不连续等。
[0063]
目前常用的边缘检测模型有很多:一阶的有roberts算子,prewitt算子,sobel算子,canny算子等;二阶的有laplacian算子等。图像的边缘检测是基于图像的梯度来实现的,而获得图像的梯度就转化成使用各种算子对图像进行卷积运算来获得的。
[0064]
作为一个示例,本发明实施例中利用canny算子处理灰度图像得到边缘图像。
[0065]
进一步的,步骤s103、将每一条独立边缘曲线的最左侧像素点分别与独立边缘曲线中各像素点相连,分别获得每一条独立边缘曲线中各像素点的向量。具体包括:
c2|越大时,第一类别中的像素属于缺陷像素点的概率越大。
[0077]
作为一个示例,本发明实施例中超参数取0.2。
[0078]
进一步的,步骤s106、每一条独立边缘曲线中第一类别像素点中像素点的流畅度大于预设阈值的像素点为该独立边缘曲线中的缺陷像素点,根据所有独立边缘曲线中得到的缺陷像素点得到缺陷区域。具体包括:
[0079]
当第一类别中的像素点的流畅度大于预设阈值时,本实施例中将其作为存在毛刺缺陷的缺陷像素点,如此,得到了存在毛刺缺陷的缺陷像素点,便于将缺陷像素点组成缺陷区域,同时便于后续处理过程中对存在毛刺缺陷的部位进行修复处理。
[0080]
作为一个示例,本发明实施例中预设阈值为0.8,实施者可根据自身的的需求进行适时调节。
[0081]
可选地,本发明实施例中方法还包括对金具在缺陷像素点处的缺陷进行修复处理。
[0082]
具体的,采集毛刺区域螺牙侧图像:通过上述方式定位出缺陷像素点像素坐标,根据相机与绝缘子金具的空间关系,移动相机采集各缺陷像素点的侧面图像。
[0083]
根据螺牙侧图像获取毛刺平均翘起角度:
[0084]
首先,获得缺陷像素点侧面图像的边缘,根据非缺陷像素点的侧面图像的螺牙边缘相似性分割出螺牙边缘像素,其余边缘像素为毛刺侧面像素。
[0085]
其次,计算毛刺的平均最小翘起角度:获取毛刺侧面像素与螺纹牙侧边缘线的最近点,获取该像素与螺纹牙顶像素连线构成向量,同时获取与该缺陷像素点较近的螺纹牙边缘线向量,计算出两向量的夹角,并以此获得所有缺陷像素点与螺纹牙的最小翘起角度,通过将第i个独立边缘曲线上的所有缺陷像素点的最小求平均即可得到第i条独立边缘曲线的平均最小翘起角度。
[0086]
然后,根据翘起角度确定磨头角度,包括:将独立边缘曲线的平均最小翘起角度除以2即可得到待磨削的独立边缘曲线上毛刺的磨头角度,该角度为磨头想对于螺纹牙侧边线的夹角。
[0087]
确定磨削点,包括:通过独立边缘曲线上无毛刺缺陷的螺纹牙侧面图像获取该螺纹的压顶位置,该点即为磨削点。
[0088]
根据磨头角度和螺牙侧边线确定磨头伸出长度:获取与第i个独立边缘曲线的螺纹牙磨削侧螺牙侧边线,获取与其相邻的螺牙侧边线。从磨削点出发,沿磨削方向,绘制直线,该直线与螺纹牙侧边线相交于一点,计算该点与磨削点的距离,并以此获得所有缺陷像素点处的磨头最大伸出长度。
[0089]
最后,根据磨头角度和伸出长度来实现毛刺去除智能控制,包括:通过得到的各缺陷像素点的磨削点、磨头角度,以及磨头伸出长度可生成磨头的移动曲线,进而可实现毛刺的智能去除控制。
[0090]
基于与上述方法相同的发明构思,本实施例还提供了一种基于图像处理的绝缘子金具修整系统,本实施例中基于图像处理的绝缘子金具修整系统包括存储器和处理器,所述处理器执行所述存储器存储的计算机程序,以实现如基于图像处理的绝缘子金具修整方法实施例中所描述的对金具的螺纹中存在的毛刺缺陷进行检测。
[0091]
由于基于图像处理的绝缘子金具修整方法实施例中已经对金具的螺纹中存在的
毛刺缺陷进行检测的方法进行了说明,此处不再赘述。
[0092]
综上所述,本发明提供了一种基于图像处理的绝缘子金具修整方法及系统,能够实现对生产过程中的金具中存在的毛刺缺陷的检测,并对金具中存在毛刺缺陷的部位进行修复处理,同时提高了对金具中存在的毛刺缺陷的检测效率及准确率。
[0093]
本发明中涉及诸如“包括”、“包含”、“具有”等等的词语是开放性词汇,指“包括但不限于”,且可与其互换使用。这里所使用的词汇“或”和“和”指词汇“和/或”,且可与其互换使用,除非上下文明确指示不是如此。这里所使用的词汇“诸如”指词组“诸如但不限于”,且可与其互换使用。
[0094]
还需要指出的是,在本发明的方法和系统中,各部件或各步骤是可以分解和/或重新组合的。这些分解和/或重新组合应视为本公开的等效方案。
[0095]
上述实施例仅仅是为清楚地说明所做的举例,并不构成对本发明的保护范围的限制。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动,这里无需也无法对所有的实施方式予以穷举。凡是与本发明相同或相似的设计均属于本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1