基于VisionTransformer的滚动轴承故障智能识别方法
基于vision transformer的滚动轴承故障智能识别方法
技术领域
1.本发明涉及机械故障诊断领域,特别是涉及滚动轴承故障诊断方向,具体涉及基于vision transformer的滚动轴承故障智能识别方法。
背景技术:
2.滚动轴承是旋转机械常用的支承部件,其健康运行是整机正常运转的基础。实际生产条件下,滚动轴承大多处于非平稳、强噪声环境中,极易出现各种机械故障,如点蚀、烧伤、断裂等,影响整机的工作稳定性,甚至引发更为严重的后果。因此及时、准确地对滚动轴承故障状态进行识别,对保持机器运转的稳定性和安全性具有重要意义。但由于实际测量得到的滚动轴承故障信号常包含较强的背景噪声,滚动体通过损伤点产生的脉冲应力往往被噪声所淹没,难以识别。所以,有效的故障特征提取成为了滚动轴承故障诊断的重点内容之一。随着故障诊断理论研究的不断深入,提出了许多故障诊断方法,其目的是降低噪声并提取故障特征,如经验模态分解及其改进方法、小波分析、奇异值分解等,但这些方法多受到人为因素制约,需要先验知识或参数预调控来实现好的故障特征提取及识别。近年来,随着大数据深度学习技术的迅速发展,数据驱动的设备智能故障诊断受到了广泛关注。相比以经典信号处理为核心的故障诊断,数据驱动的智能诊断方法没有严格的先验知识要求,避免了对人工特征提取的依赖。但数据驱动的智能诊断方法需要依靠大量的数据作为网络储备,导致数据集制作和图像预处理任务繁重,效率低下。
技术实现要素:
3.本发明的目的在于提供基于vision transformer的滚动轴承故障智能识别方法,以解决现有技术存在的问题,本发明对滚动轴承故障诊断综合实验台上采集的振动信号转化后的振动灰度图像识别准确率达94.6%,具有良好的实际应用价值。
4.为达到上述目的,本发明采用如下技术方案:
5.基于vision transformer的滚动轴承故障智能识别方法,包括以下步骤;
6.1)构建振动灰度纹理图像数据集:采集滚动轴承的一维原始振动信号,将一维原始振动信号转换为二维灰度纹理图像,建立振动灰度纹理图像数据集,并将振动灰度纹理图像数据集分为训练集和测试集;
7.2)构建vision transformer网络:结合自注意力机制、编码-解码网络和softmax分类器,构建vision transformer网络;
8.3)训练vision transformer网络并保存:利用步骤1)中的振动灰度纹理图像数据集的训练集训练vision transformer网络,保存最后一次训练结束后的网络参数,使用测试集测试vision transformer网络的训练效果,计算vision transformer网络在测试集上的分类准确率、在imagenet数据集上的分类准确率top-1和在imagenet数据集上的前五种分类准确率top-5,作为vision transformer网络的三个评价指标;
9.4)vision transformer网络参数微调:以步骤3)中测试集分类准确率、top-1和
top-5作为是否微调vision transformer网络参数的依据,若三个评价指标达到预定目标值,则不需要微调vision transformer网络参数;若三个评价指标未达到预定目标值,则微调vision transformer网络参数,更新vision transformer网络参数后重复步骤3),直到三个评价指标到达预定目标值,完成vision transformer网络参数微调,结束vision transformer网络训练;
10.5)基于vision transformer的滚动轴承故障智能识别:采集状态未知的滚动轴承的振动信号,将一维原始振动信号转换为二维灰度纹理图像,输入到步骤4)已训练好的vision transformer网络中进行智能识别,得到滚动轴承的故障识别结果。
11.进一步地,所述步骤1)中采集滚动轴承的一维原始振动信号,将一维原始振动信号的幅值归一化到[-1,1]之间,然后转换到[0,255],转换后的振动信号幅值对应振动灰度纹理图像的像素值,一维原始振动信号的幅值与振动灰度纹理图像素转换关系如式(1)所示:
[0012][0013]
式中:d
i,j
是一维原始振动信号,其中i,j是原始振动信号的幅值尺寸;min是原始振动信号幅值的最小值;max是原始振动信号幅值的最大值;g
i,j
是转化后的振动灰度纹理图像的像素值;
[0014]
得到振动灰度纹理图像后,对振动灰度纹理图像进行局部二值化lbp,lbp算子定义在3
×
3的窗口内,以窗口中心像素为阈值,将相邻8个像素的灰度值与阈值比较,若周围像素值大于中心像素,则周围像素点位置记为1,否则为0,按顺时针方向从左上角读取八位二进制数,转换为十进制后即为对应的lbp值,如式(2):
[0015][0016]
式中:(xc,yc)是中心像素;ic是中心像素的灰度值;i
p
是相邻像素的灰度值,p是扁平化二维块的分辨率,x是相邻像素与中心像素的差值;
[0017]
将lbp处理后的每一张振动灰度纹理图像的高和宽设置为l
×
m,对振动灰度纹理图像分类并添加标签,其标签包括正常状态、内圈故障状态、外圈故障状态和滚动体故障状态四种。
[0018]
进一步地,所述步骤2)中,vision transformer网络由一个编码器和一个分类器构成,其中编码器为transformer encoder网络,用于提取输入的振动灰度纹理图像数据集的特征,分类器为softmax分类器,用于训练所提取的特征并分类。
[0019]
进一步地,所述步骤2)中vision transformer网络的输入编码由两部分组成,分别为块嵌入和位置编码;为处理二维灰度纹理图像,将二维灰度纹理图像分块并经线性变换展开为一系列扁平化二维块并经线性变换展开为一系列扁平化二维块其中n的计算如式(3):
[0020]
n=hw/p2ꢀꢀꢀ
(3)
[0021]
式中:h表示原始图像分辨率的高,w表示原始图像分辨率的宽;(p,p)表示每个扁
平化二维块的分辨率;
[0022]
将扁平化二维块序列线性变换展开为一维向量,即块嵌入操作,如式(4)所示:
[0023][0024]
式中:其中n为扁平化二维块的个数,d为键的尺寸,p是扁平化二维块的分辨率,c是扁平化二维块的维数,e是输入语义编码的向量值,e
pos
为经位置编码后输入语义编码的向量值,x
pn
是第n个扁平化二维块;x
class
是扁平化二维块序列的类别,class代表类别的编号;
[0025]
添加位置编码区分输入的不同嵌入位置,进而实现位置信息与图像信息的充分融合并传递到后续序列表达中,具体采用不同频率变化的正余弦函数生成位置编码,计算方法如下:
[0026][0027][0028]
式中:pos为输入语义编码的位置;d
model
为块嵌入操作生成输出的尺寸;pe
(pos+k,2i)
为采用正弦编码时位置编码向量的编码值;pe
(pos+k,2i+1)
为采用余弦编码时位置编码向量的编码值;i为位置编码向量的维度。
[0029]
进一步地,所述步骤2)中vision transformer网络的编码器接收来自输入编码的序列z0作为输入,每个transformer encoder包含两个子层,分别为多层感知机和多头自注意力机制层,所述多层感知机如式(7)所示:
[0030]
zf=msa(layernorm(zf′
))+zd′ꢀꢀꢀ
(7)
[0031]
式中:l=1,2,...f;zf是多层感知机末层的输出;zf′
是多层感知机末层的输入;
[0032]
编码器中多头自注意力机制层用于确定单个扁平化二维块的嵌入相对于序列中其他嵌入的重要性,多头自注意力机制层由线性层、点积自注意力层,连接多个关注头输出的连接层,以及最终的线性层四部分组成,多头自注意力机制的计算过程如下:
[0033][0034]
headi=attention(qw
iq
,kw
ik
,vw
iv
)
ꢀꢀꢀ
(9)
[0035][0036]
式中:dq是计算w
iq
时查询或键的尺寸;dk是计算w
iq
时查询或键的尺寸;dv是计算w
iv
时查询或键的尺寸;d
model
为块嵌入操作生成输出的尺寸;headi代表自注意力机制的主头数;
[0037]
同时对一组计算多头自注意力机制函数,并将多头自注意力机制函数值打包到矩阵q中,键和值也打包到矩阵k和v中,concatenate函数用于拼接多头注意力计算得到的输出,softmax函数用于获得值的权重;
[0038]
每个子层的输出表示为:
[0039]
out=layernorm(x+sublayer(x))
ꢀꢀꢀ
(11)
[0040]
式中:sublayer(x)是每个子层内部的函数,x为多头自注意力机制函数的输出值,,此处为自注意力机制层处理函数和一维卷积层处理函数,layernorm(
·
)为层归一化处理函数。
[0041]
进一步地,所述步骤3)中vision transformer网络的训练过程为:利用步骤1)中的振动灰度纹理图像数据集的训练集训练步骤2)的vision transformer网络和softmax分类器,将vision transformer网络训练完毕得到的各网络参数保存,多层感知机的最后一层网络隐含层所提取的特征向量即为振动灰度纹理图像数据集的特征,将振动灰度纹理图像数据集的特征送入softmax分类器完成分类,其中网络参数包括权重和偏置。
[0042]
进一步地,步骤3)的softmax分类器所提取的振动灰度纹理图像数据集的特征在vision transformer网络各连接层中逐层向前传递,结合adam优化算法,各层神经元的权值和偏置被不断调整,直到到达迭代次数或者设定的误差最小值为止,最终得到vision transformer网络最合适的权值与偏置值。
[0043]
与现有技术相比,本发明具有以下有益的技术效果:
[0044]
1)本发明提供了一种基于振动灰度纹理图像的滚动轴承故障诊断方法,不同于传统振动信号分析方法,而是将一维振动信号转换为二维的灰度纹理图像并进行局部二值化,获得了振动灰度纹理图像,能够更高效地提取滚动轴承故障特征。
[0045]
2)本发明提供的基于vision transformer的滚动轴承故障智能识别方法,经线性映射归一化和局部二值化处理后得到振动灰度纹理图像,将其作为输入信号,再根据vision transformer网络完成训练过程,得到所测振动灰度纹理图像的分类准确率,完成图像识别过程。诊断方式简单、快捷,结合人工智能技术,使得滚动轴承故障诊断过程更加智能化、高效化。
[0046]
3)本发明提供的一种基于vision transformer的滚动轴承故障智能智能识别技术,实现了滚动轴承的故障诊断功能,方法具有普适性,根据不同类型滚动轴承的振动信号转为振动灰度纹理图像后均可以实现图像识别,进而实现故障诊断。
[0047]
4)本发明提供的基于vision transformer的滚动轴承故障智能识别方法,对滚动轴承故障诊断综合实验台上采集的振动信号转化后的振动灰度图像识别准确率达94.6%,具有良好的实际应用价值。
附图说明
[0048]
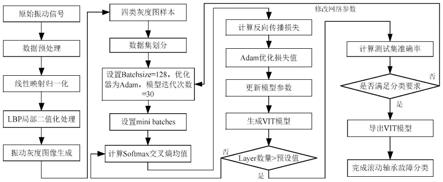
图1是本发明的vision transformer的图像识别流程示意图;
[0049]
图2是本发明的vision transformer的网络结构图。
具体实施方式
[0050]
下面对本发明作进一步详细描述:
[0051]
参见附图1,本发明的基于vision transformer的滚动轴承故障智能识别方法,主要包含如下步骤:
[0052]
1)本发明提供的方法,通过滚动轴承故障诊断综合实验台采集振动信号,并将一维振动信号通过线性映射归一化和lbp局部二值化等处理方式转化为振动灰度纹理图像。
收集滚动轴承的振动信号,将振动信号的幅值归一化到[-1,1]之间,然后转换到[0,255]。转化后的振动信号幅值对应振动灰度纹理图像的像素值,一维原始振动信号的幅值与振动灰度纹理图像素转换关系如下所示。
[0053][0054]
式中:d
i,j
是一维原始振动信号,其中i,j是原始振动信号的幅值尺寸;min是原始振动信号幅值的最小值;max是原始振动信号幅值的最大值;g
i,j
是转化后的振动灰度纹理图像的像素值;
[0055]
为度量图像局部纹理信息,对振动灰度纹理图像进行局部二值化(local binary patterns,lbp)。lbp算子定义在3
×
3的窗口内,以窗口中心像素为阈值,将相邻8个像素的灰度值与之比较,若周围像素值大于中心像素,则该像素点位置记为1,否则为0,按顺时针方向从左上角读取八位二进制数,转换为十进制后即为对应的lbp值。算法流程总结如下所示。
[0056][0057]
式中:(xc,yc)是中心像素;ic是中心像素的灰度值;i
p
是相邻像素的灰度值,p是扁平化二维块的分辨率,x是相邻像素与中心像素的差值;
[0058]
在数据灰度转换之前对其进行预处理,通过移动平均滤波将原始信号中高频成分除去,将一维数据以二维方阵形式输出,经lbp灰度纹理化,输出灰度图像。在振动灰度纹理图像转换过程中,不同频率信号经lbp后,纹理大小、偏转方向等存在差异,因故障点不同,故障频率不同。将转化后的每一张振动灰度纹理图像的高和宽设置为,256
×
256对振动灰度纹理图像分类并添加标签,其标签包括正常状态、内圈故障状态、外圈故障状态和滚动体故障状态四种。
[0059]
2)对于转化后的振动灰度纹理图像划分为训练集和测试集;将训练集样本送入附图2中的vision transformer网络开始训练,网络训练过程共分为三部分。
[0060]
第一部分:首先将训练集样本转化为输入编码,vision transformer网络的输入编码由两部分组成,分别为块嵌入(patch embedding)和位置编码(positional encoding)。vision transformer网络接受一维序列的块嵌入为输出。为处理二维的振动灰度图像,将二维灰度纹理图像分块并经线性变换展开为一系列扁平化二维块其中n的计算见下式:
[0061]
n=hw/p2[0062]
式中:h表示原始图像分辨率的高,w表示原始图像分辨率的宽;(p,p)表示每个扁平化二维块的分辨率。
[0063]
vision transformer模型在其所有子层中使用恒定大小的向量,因此将patch序列线性变换展开为一维向量,即块嵌入操作,如下式所示。
[0064]
[0065]
式中:其中n为扁平化二维块的个数,d为键的尺寸,p是扁平化二维块的分辨率,c是扁平化二维块的维数,e是输入语义编码的向量值,e
pos
为经位置编码后输入语义编码的向量值,x
pn
是第n个扁平化二维块;x
class
是扁平化二维块序列的类别,class代表类别的编号。
[0066]
由于transformer完全依靠自注意力机制学习输入数据的特征,而自注意力机制存在不能捕捉位置信息的局限性,需要额外添加位置编码来区分输入的不同嵌入位置,进而实现位置信息与图像信息的充分融合并传递到后续序列表达中,该过程即为位置编码,其采用不同频率变化的正余弦函数来生成位置编码,计算方法如下。
[0067][0068][0069]
式中:pos为输入语义编码的位置;d
model
为块嵌入操作生成输出的尺寸;pe
(pos+k,2i)
为采用正弦编码时位置编码向量的编码值;pe
(pos+k,2i+1)
为采用余弦编码时位置编码向量的编码值;i为位置编码向量的维度。
[0070]
第二部分:vision transformer网络的编码器接收来自输入编码的序列z0作为输入,每个transformer encoder包含两个子层,分别为多层感知机和多头自注意力机制层,计算过程如下所示。
[0071]
zf=msa(layernorm(zf′
))+zf′
式中:l=1,2,...m。
[0072]
式中:l=1,2,...f;zf是多层感知机末层的输出;zf′
是多层感知机末层的输入。
[0073]
编码器中msa(multi-head self-attention block)是vision transformer的核心,其作用是确定单个patch嵌入相对于序列中其他嵌入的重要性。多头自注意力模块由线性层、点积自注意力层,连接多个关注头输出的连接层,以及最终的线性层四部分组成。多头自注意力机制可以描述为将查询和一组键-值对映射到输出,输出是一组值的加权和,其中分配给每个值的权重由使用键值进行查询计算得到。多头注意力机制允许模型在不同位置共同关注来自不同表示子空间的信息。多头自注意力机制的计算过程如下:
[0074]
multihead(q,k,v)
[0075]
=concatenata(head1...headn)w
t
[0076]
headi=attention(qw
iq
,kw
ik
,vw
iv
)
[0077][0078]
式中:dq是计算w
iq
时查询或键的尺寸;dk是计算w
iq
时查询或键的尺寸;dv是计算w
iv
时查询或键的尺寸;d
model
为块嵌入操作生成输出的尺寸;headi代表自注意力机制的主头数。
[0079]
同时对一组计算多头自注意力机制函数,并将多头自注意力机制函数值打包到矩阵q中,键和值也打包到矩阵k和v中,concatenate函数用于拼接多头注意力计算得到的输出,softmax函数用于获得值的权重;
[0080]
第三部分:为了使网络结构具备通过增加深度来提高准确率的能力,每个子层内
部均使用残差连接,同时每个子层末端使用层归一化。因此,每个子层的输出表示为:
[0081]
out=layernorm(x+sublayer(x))
[0082]
式中:sublayer(x)是每个子层内部的函数,x为多头自注意力机制函数的输出值,这里为自注意力机制层处理函数和一维卷积层处理函数,layernorm(
·
)为层归一化处理函数。
[0083]
3)对vision transformer网络完成训练后,将得到的各网络参数保存,多层感知机的最后一层网络隐含层所提取的特征向量即为振动灰度图像数据集的特征,将振动灰度纹理图像数据集的特征送入softmax分类器完成分类,其中网络参数包括权重和偏置。
[0084]
4)vision transformer网络参数微调:以步骤3)中测试集分类准确率、top-1和top-5作为是否微调vision transformer网络参数的依据,若三个评价指标达到预定目标值,则不需要微调vision transformer网络参数;若三个评价指标未达到预定目标值,则微调vision transformer网络参数,重复步骤2),直到三个评价指标到达预定目标值,完成vision transformer网络参数微调,结束vision transformer网络训练;
[0085]
5)基于vision transformer的滚动轴承故障智能识别:采集状态未知的滚动轴承的振动信号,将一维原始振动信号转换为二维的振动灰度纹理图像,输入到已训练好的vision transformer网络中进行智能识别,得到滚动轴承的故障识别结果。
[0086]
下面结合具体实例对本发明做进一步详细说明,所述内容均为对本发明的解释,但这些说明不能被理解为限制了本发明的范围,本发明的保护范围由随附的权利要求书限定,任何在本发明权利要求基础上的改动就是本发明的保护范围。
[0087]
1)收集滚动轴承的振动信号,将一维原始振动信号转换为二维的灰度纹理图像,建立振动灰度纹理图像数据集,并分为训练集和测试集;设置图像大小为256
×
256。
[0088]
2)将得到的振动灰度图像输入训练好的vision transformer网络,进行智能识别,得到故障识别结果,识别准确率为94.6%。结果如下表1所示。
[0089]
表1模型最终性能
[0090][0091]
以上结合具体实例对本发明的具体实施方式对本发明作了进一步详细说明,所述内容均为对本发明的解释但这些说明不能被理解为限制了本发明的范围,本发明的保护范围由随附的权利要求书限定,任何在本发明权利要求基础上的改动就是本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1