考虑发动机关机和参数强非线性的连续推力轨迹优化方法
1.本发明涉及一种考虑发动机关机和参数强非线性的连续推力轨迹优化方法,尤其适用于携带可变比冲和推力发动机探测器,同时具有定期关机约束的连续推力轨迹快速优化计算,属于航空航天技术领域。
背景技术:
2.相比于传统的化学推进发动机,由于连续推力发动机的高比冲,探测器可以携带重量更少的燃料实现相同的速度增量,从而获得更加丰富的太空探测任务回报。日益复杂的探测任务对机载自主能力需求也日益增加,自主轨迹规划能力尤为关注。然而,对于搭载连续推力发动机的探测器而言,实现快速的在线轨迹规划具有很强的挑战性。除此之外,考虑发动机强非线性参数变化以及定期关机约束相比传统的常推力且无定期关机的情形更加符合实际任务需求,如果不考虑关机需求会导致无法准确对探测器进行定轨,末端误差大,而传统连续推力轨迹优化方法难以解决考虑上述两种非线性约束的轨迹优化问题。在已发展的关于连续推力轨迹优化先技术[1](参见 jiang f, baoyin h, li j. practical techniques for low-thrust trajectory optimization with homotopic approach[j]. journal of guidance, control, and dynamics, 2012, 35(1): 245-258.)提出基于同伦法的常推力连续推力转移轨迹优化方法,虽然该方法极大地提升了问题的收敛性,但是需要从多组不同协态变量初值的结果中筛选最优转移轨迹,因此其计算效率一般。
技术实现要素:
[0003]
为了解决不考虑发动机关机和参数强非线性导致的实际工程中无法准确定轨以及变参数发动机无法采用传统轨迹优化方法进行优化的问题,本发明的主要目的是提供一种考虑发动机关机和参数强非线性的连续推力轨迹优化方法,通过逐次凸规划实现考虑测控等限制需定期关机和携带类似于推力、比冲随日心距变化的离子发动机时的连续推力轨迹优化问题的高效求解,实现考虑发动机关机和参数强非线性的连续推力轨迹优化。
[0004]
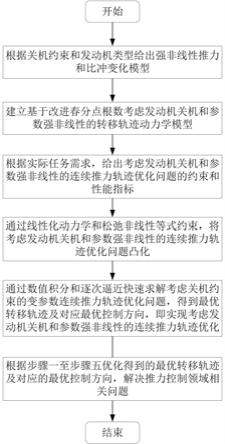
本发明的目的是通过下述技术方案实现的:本发明公开的考虑发动机关机和参数强非线性的连续推力轨迹优化方法,首先根据开关机约束和发动机类型给出强非线性推力和比冲变化模型;然后建立基于改进春分点根数考虑发动机关机和参数强非线性的转移轨迹动力学模型;之后根据实际任务需求,给出考虑发动机关机和参数强非线性的连续推力轨迹优化问题的约束和性能指标;然后通过线性化动力学和松弛非线性等式约束,将考虑发动机关机和参数强非线性的连续推力轨迹优化问题凸化;然后通过数值积分和逐次逼近快速求解考虑关机约束的变参数连续推力轨迹优化问题,得到最优转移轨迹及对应的最优控制方向,即实现考虑发动机关机和参数强非线性的连续推力轨迹优化。
[0005]
本发明公开的考虑发动机关机和参数强非线性的连续推力轨迹优化方法,包括如下步骤:
步骤一:根据关机约束和发动机类型给出强非线性推力和比冲变化模型。
[0006]
强非线性参数发动机的推力和比冲随探测器帆板的输入功率变化,而帆板输入功率与日心距成反比:(1)其中r
au
是日心距离,单位为au,p0为日心距为1au时帆板的输入功率,p
in
是日心距为r
au
时帆板输入功率;发动机最大推力t
max
和比冲随帆板输入功率的变化有两种模式,一种为多项式变化,一种是阶梯变化;将最大推力t
max
和比冲i
sp
表示为输入功率的函数g和h,即(2)探测器进行转移时,需要定期对探测器进行定轨,此时发动机需定期关闭;考虑发动机开关机约束用标志符u
t
表示为(3)其中,t为飞行时间,t
on
和t
off
分别表示发动机的最大连续开机时长和执行定轨所需的单次最短关机时长;进而考虑关机约束的发动机最大推力t
max
为(4)步骤二:建立基于改进春分点根数考虑发动机关机和参数强非线性的转移轨迹动力学模型。
[0007]
采用改进春分点根数描述探测器的状态,其中,,,,,,a、e、i、ω、ω和υ分别为探测器轨迹的半长轴、偏心率、轨道倾角、近地点幅角、升交点赤经和真近点角;则连续推力探测器的轨道动力学模型为(5)其中
(6)且控制向量的系数矩阵为:(7),,其中,i
sp
(r)和t(r)是与日心距相关的发动机强非线性比冲和推力大小;=1+fcosl+gsinl,s2=1+h2+k2,μ是中心天体的引力常数,m是探测器质量,c为控制向量,c=[fr,f
t
,fn,t]
t
,fr,f
t
,fn分别发动机径向、切向、法向推力大小。
[0008]
步骤三:根据实际任务需求,给出考虑发动机关机和参数强非线性的连续推力轨迹优化问题的约束和性能指标。始末端探测器状态均由任务时间对应的星历给出。相应的改进春分点轨道根数为:(8)
ꢀ
(9)其中t0与tf分别为始末时间;同时,初始质量m(t0)固定,末端质量m(tf)无约束;探测器的推力分量满足 (10)且(11)期望得到燃料最优连续推力轨迹,故将优化问题的性能指标设定为: (12)目的为最大化探测器末端质量,即最小化燃料消耗。
[0009]
综上所述,燃料最优连续推力转移轨迹优化问题p1总结为:约束方程:式(8)~(11)。
[0010]
步骤四:通过线性化动力学和松弛非线性等式约束,将考虑发动机关机和参数强非线性的连续推力轨迹优化问题凸化。
[0011]
为了将探测器动力学凸化,将非线性动力学方程(5)基于小扰动的连续线性化方法近似。连续近似过程中第k次迭代存在一个解xk;然后,第k+1次迭代过程中,在xk存在的前提下将动力学方程线性化,主项h(x)在xk附近线性化;故线性化后的动力学方程为:(13)其中;状态向量系数矩阵为:(14)其中,,,,
;方程(10)中推力向量的非线性约束函数是非凸的;在运用凸优化方法前必须将其化为凸函数;故将式(10)中等号松弛为不等号,然后该约束就转化为凸约束,即:(15)从而,线性化后的动力学(13)、始末约束(8)(9)、凸约束(15)、性能指标(12)一起构成了凸子问题p2。
[0012]
步骤五:通过数值积分和逐次逼近快速求解考虑关机约束的变参数连续推力轨迹优化问题,得到最优转移轨迹及对应的最优控制方向,即实现考虑发动机关机和参数强非线性的连续推力轨迹优化。采用梯形法对式(13)中的数值积分进行转化,从而将问题p2转化为凸优化问题形式。将转移任务时间区间[t0,tf]划分为n+1个节点,第i个节点处探测器的状态量和控制量记为xi、ui,则变量集为[x0,
...,
x
i,...,
xn],待求解控制集为[c0,
...,ci
,
,...,cn
],则动力学积分(13)转化为(16)其中i=0,1,
…
,n-1,,,。
[0013]
从而,凸子问题p2转化为凸问题。
[0014]
对凸问题进行连续逼近以便迭代求解得到最优的考虑关机约束的变参数连续推力转移轨迹,直至其解收敛于p1的解。
[0015]
令k=0,给出初始状态向量的猜测值x0,由从初值x(t0)到终值x(tf)的直线获取;l(t)的猜测值选取从l(t0)到l(tf)+2∏
·
γ的一条直线,其中γ为连续推力转移轨迹运行圈数的估计值;m(t)的猜测值选取m(t0)到m(tf)的一条直线。
[0016]
对于第i+1次迭代,选取第k次迭代的解xk作为状态向量的猜测初值,解对为。
[0017]
检查是否满足收敛条件:(17)其中,ρ为收敛精度要求;如果不满足式(17),需要继续迭代求解,如果满足式(17)即得到问题p1的解x
*
=x
k+1
、c
*
=c
k+1
。
[0018]
至此,得到考虑发动机定期关机约束和强非线性变化参数的连续推力轨迹优化问题的解,x
*
为最优转移轨迹,c
*
为对应的最优控制方向。
[0019]
还包括步骤六:根据步骤一至步骤五优化得到的最优转移轨迹及对应的最优控制
方向, 解决推力控制领域相关问题。
[0020]
有益效果: (1)本发明的一种考虑发动机关机和参数强非线性的连续推力轨迹优化方法,由于对发动机的开关机和强非线性参数进行建模并基于此进行连续推力轨迹优化问题的处理和求解,所以对实际工程中考虑定轨约束需定期关机以及发动机比冲和推力大小强非线性变化的连续推力场景适用性强,末端状态精度高。
[0021]
(2)本发明的一种考虑发动机关机和参数强非线性的连续推力轨迹优化方法,通过将非线性连续推力转移轨迹优化问题转化为凸问题,并应用序列凸规划方法进行推力和比冲可变且定期关机的连续推力轨迹优化,计算效率高,通常只需要秒级运算,相较于应用较为广泛的同伦法效率显著增加。
[0022]
(3)本发明的一种考虑发动机关机和参数强非线性的连续推力轨迹优化方法,优化求解过程具有普适性,因此对近地轨道和深空探测轨迹考虑发动机关机和强参数非线性的连续推力转移均适用,适用范围广。
[0023]
(4)本发明的一种考虑发动机关机和参数强非线性的连续推力轨迹优化方法,相较于传统的连续推力轨迹优化初值猜测效率较低的问题,本发明初值猜测只需对始末状态线性离散作为猜测初值,因此鲁棒性强。
附图说明
[0024]
图 1 为本发明公开的一种考虑发动机关机和参数强非线性的连续推力轨迹优化方法流程图;图 2 为本发明公开的一种考虑发动机关机和参数强非线性的连续推力轨迹优化方法求解实施例1得到的最优连续推力转移轨迹,图2(a)为 xy 平面轨迹,图 2(b)为yz平面轨迹;图 3 为本发明公开的一种考虑发动机关机和参数强非线性的连续推力轨迹优化方法求解实施例1得到的最优推力大小变化曲线;图 4 为本发明公开的一种考虑发动机关机和参数强非线性的连续推力轨迹优化方法求解实施例1得到的最优径向、切向、法向推力分量变化曲线;图 5 为本发明公开的一种考虑发动机关机和参数强非线性的连续推力轨迹优化方法求解实施例2得到的最优连续推力转移轨迹;图 6 为本发明公开的一种考虑发动机关机和参数强非线性的连续推力轨迹优化方法求解实施例2得到的最优推力大小变化曲线;图 7 为本发明公开的一种考虑发动机关机和参数强非线性的连续推力轨迹优化方法求解实施例2得到的最优径向、切向、法向推力分量变化曲线。
具体实施方式
[0025]
为了更好地说明本发明的目的和优点,下面结合具体实施示例对本发明做出详细解释。
[0026]
实施例1:选择目标天体为彗星67p,设计从地球至彗星67p的连续推力转移轨迹。探测器初
始质量m(t0)为1217.7kg。考虑发动机定期关机约束为最大连续开机时长t
on
=14天,最小单次关机时长t
off
=1天。地球出发日期为2021年10月28日0:0:0,探测器与彗星67p交会日期为2028年10月28日0:0:0。根据星历可得地球出发时和与67p交会时探测器状态用改进春分点根数表示如表1所示。
[0027]
表1地球-67p转移初始、终端状态
改进春分点根数p,mfghkl,rad初始值1.495568e+11-0.00380.0163-2.4755e-52.2439e-613.1684末端值3.051940e+110.29170.57070.03940.04722.5061
如图1所示,本实施例提供一种考虑发动机关机和参数强非线性的连续推力轨迹优化方法,具体实现步骤如下: 步骤一:根据关机约束和发动机类型给出强非线性推力和比冲变化模型。强非线性参数发动机的推力和比冲随探测器帆板的输入功率变化,而帆板输入功率一般与日心距成反比:(18)其中r
au
是日心距离,单位为au,p0为日心距为1au时帆板的输入功率,p
in
是日心距为r
au
时帆板输入功率;发动机最大推力t
max
和比冲随帆板输入功率的变化有两种模式,一种为多项式变化,一种是阶梯变化;将最大推力t
max
和比冲i
sp
表示为输入功率的函数g和h,即(19)探测器进行转移时,需要定期对探测器进行定轨,此时发动机需定期关闭;考虑发动机开关机约束用标志符u
t
表示为(20)其中,t为飞行时间,t
on
和t
off
分别表示发动机的最大连续开机时长和执行定轨所需的单次最短关机时长;进而考虑关机约束的发动机最大推力t
max
为(21)采用如表2所示的发动机参数阶梯变化模型,每个输入功率级别对应一组最大推力和比冲。
[0028]
表2 发动机参数阶梯变化表
参数数值数值数值数值数值数值数值数值数值数值数值数值输入功率(kw)4.644.163.342.742.322.081.861.671.371.140.930.57最大推力(mn)184.6166.6132.2105.692.383.369.666.152.843.634.821.8比冲(s)331332933291330033133293297432913300218829742188
选取探测器初始质量m(t0)=1217.7kg。考虑发动机定期关机约束为最大连续开机时长t
on
=14天,最小单次关机时长t
off
=1天。地球出发日期为2021年10月28日0:0:0,探测器与彗星67p交会日期为2028年10月28日0:0:0。
[0029]
步骤二:建立基于改进春分点根数考虑发动机关机和参数强非线性的转移轨迹动力学模型。
[0030]
采用改进春分点根数描述探测器的状态,其中,,,,,,,a、e、i、ω、ω和υ分别为探测器轨迹的半长轴、偏心率、轨道倾角、近地点幅角、升交点赤经和真近点角;则连续推力探测器的轨道动力学模型为(22)其中(23)且控制向量的系数矩阵为:(24),,
其中,i
sp
(r)和t(r)是与日心距相关的发动机强非线性比冲和推力大小;=1+fcosl+gsinl,s2=1+h2+k2,μ是中心天体的引力常数,m是探测器质量,c为控制向量,c=[fr,f
t
,fn,t]
t
,fr,f
t
,fn分别发动机径向、切向、法向推力大小。
[0031]
步骤三:根据实际任务需求,给出考虑发动机关机和参数强非线性的连续推力轨迹优化问题的约束和性能指标。
[0032]
在本任务场景中,始末端探测器状态均由任务时间对应的地球和彗星67p星历给出。相应的改进春分点轨道根数为: x(t0)=[1.495568e+11,-0.0038,0.0163,-2.4755e-5,2.2439e-6,13.1684](25) x(tf)=[3.051940e+11,0.2917,0.5707,0.0394,0.0472,2.5061](26)其中t0与tf分别为始末时间。同时,初始质量m(t0)=1217.7kg,末端质量m(tf)无约束。探测器的推力分量满足满足(27)且(28)期望得到燃料最优连续推力轨迹,故将优化问题的性能指标设定为: (29)目的为最大化探测器末端质量,即最小化燃料消耗。
[0033]
综上所述,燃料最优小推力转移轨迹优化问题(也被称为p1)可总结为:约束方程:式(25) ~ (28)。
[0034]
步骤四:通过线性化动力学和松弛非线性等式约束,将考虑发动机关机和参数强非线性的连续推力轨迹优化问题凸化。
[0035]
为了将探测器动力学凸化,将非线性动力学方程(22)基于小扰动的连续线性化方
法近似。连续近似过程中第k次迭代存在一个解xk;然后,第k+1次迭代过程中,在xk存在的前提下将动力学方程线性化,主项h(x)在xk附近线性化;故线性化后的动力学方程为:(30)其中;状态向量系数矩阵为:(31)其中,,,,;方程(27)中推力向量的非线性约束函数是非凸的;在运用凸优化方法前必须将其化为凸函数;故将式(27)中等号松弛为不等号,然后该约束就转化为凸约束,即:(32)从而,线性化后的动力学(27)、始末约束(25)(26)、凸约束(32)、性能指标(29)一起构成了凸子问题p2。
[0036]
步骤五:通过数值积分和逐次逼近快速求解考虑关机约束的变参数连续推力轨迹优化问题。采用梯形法对式(30)中的数值积分进行转化,从而将问题p2转化为凸优化问题形式。将转移任务时间区间[t0,tf]划分为n+1个节点,第i个节点处探测器的状态量和控制量记为xi、ui,则变量集为[x0,
...,
x
i,...,
xn],待求解控制集为[c0,
...,ci
,
,...,cn
],则动力学积分(30)转化为(33)其中i=0,1,
…
,n-1,
,从而,凸子问题p2转化为凸问题。
[0037]
对凸问题进行连续逼近以便迭代求解得到最优的考虑关机约束的变参数连续推力转移轨迹,直至其解收敛于p1的解。
[0038]
令k=0,给出初始状态向量的猜测值x0,由从初值x(t0)到终值x(tf)的直线获取;l(t)的猜测值选取从l(t0)到l(tf)+2∏
·
γ的一条直线,其中γ为连续推力转移轨迹运行圈数的估计值;m(t)的猜测值选取m(t0)到m(tf)的一条直线。
[0039]
i+1次迭代,选取第k次迭代的解次迭代,选取第k次迭代的解xk作为状态向量的猜测初值,解对为。
[0040]
检查是否满足收敛条件:(34)其中,ρ为收敛精度要求;如果不满足式(34),需要继续迭代求解,如果满足式(34)即得到问题p1的解x
*
=x
k+1
、c
*
=c
k+1
,即得到考虑发动机定期关机约束和强非线性变化参数的连续推力轨迹优化问题的解,x
*
为最优转移轨迹,c
*
为对应的最优控制方向。
[0041]
经过优化,在16次迭代后满足收敛条件(34),得到探测器在转移过程中燃料消耗为337.5kg,考虑定轨约束发动机定期关机时能够准确到达末端约束处的状态。最优连续推力转移轨迹如图2所示,对应的最优推力幅值变化曲线如图3所示,其中阶梯状变化幅值与发动机推力特性相符,每条起于x轴的纵向竖线对应一次发动机开/关机,最优径向、切向、法向推力分量变化曲线如图4所示。
[0042]
步骤六:根据步骤一至步骤五优化得到的最优转移轨迹及对应的最优控制方向,对实际工程中考虑定轨约束需定期关机以及发动机比冲和推力大小强非线性变化的连续推力场景适用性强,末端状态精度高。
[0043]
实施例2:选择目标天体为小行星2011uw158,设计从地球至2011uw158的连续推力转移轨迹。探测器初始质量m(t0)为1217.7kg。考虑发动机定期关机约束为最大连续开机时长t
on
=7天,最小单次关机时长t
off
=1天。地球出发日期为2021年10月28日0:0:0,探测器与彗星67p交会日期为2026年10月28日0:0:0。根据星历可得地球出发时和与小行星2011uw158交会时探测器状态用改进春分点根数表示如表1所示。
[0044]
表1地球-2011uw158转移初始、终端状态
改进春分点根数p,mfghkl,rad初始值1.495568e+11-0.00380.0163-2.4755e-52.2439e-613.1684末端值2.081291e+110.1576-0.34160.0110-0.03848.1845
如图1所示,本实施例提供一种考虑发动机关机和参数强非线性的连续推力轨迹优化方法,具体实现步骤如下:步骤一:根据关机约束和发动机类型给出强非线性推力和比冲变化模型。
[0045]
强非线性参数发动机的推力和比冲随探测器帆板的输入功率变化,而帆板输入功率一般与日心距成反比:(35)其中r
au
是日心距离,单位为au,p0为日心距为1au时帆板的输入功率,p
in
是日心距为r
au
时帆板输入功率;发动机最大推力t
max
和i
sp
比冲随帆板输入功率的变化有两种模式,一种为多项式变化,一种是阶梯变化。可以将其统一表示为输入功率的函数g和h,即(36)探测器进行转移时,需要定期对探测器进行定轨,此时发动机需定期关闭。考虑发动机开关机约束用标志符u
t
表示为(37)其中,t为飞行时间,t
on
和t
off
分别表示发动机的最大连续开机时长和执行定轨所需的单次最短关机时长。进而考虑关机约束的发动机最大推力t
max
为(38)采用如式(38)所示的发动机参数连续变化模型,发动机最大推力t
max
和燃料质量秒流量为(39)其中,g0=9.8m/s为海平面重力加速度,a0, a1, a2, a3, a4, b0, b1, b2, b3, b4为变参数发动机模型系数,其数值分别为a0=-0.1974, a1=15.24614, a2=2.5679, a3=-0.7898, a4=0.0532,b0=438.1, b1=819.7, b2=146.9, b3=-63.2, b4=4.8,选取探测器初始质量m(t0)为1217.7kg。选取探测器初始质量t
on
=7天,最小单次关机时长t
off = 1天。地球出发日期为2021年10月28日0:0:0,探测器与小行星 2011uw158交
会日期为2026年10月28日0:0:0。
[0046]
步骤二:建立基于改进春分点根数考虑发动机关机和参数强非线性的转移轨迹动力学模型。
[0047]
采用改进春分点根数描述探测器的状态,其中,,,,,,a、e、i、ω、ω和υ分别为探测器轨迹的半长轴、偏心率、轨道倾角、近地点幅角、升交点赤经和真近点角;则连续推力探测器的轨道动力学模型为(40)其中(41)且控制向量的系数矩阵为:(42),,
其中,i
sp
(r)和t(r)是与日心距相关的发动机强非线性比冲和推力大小;=1+fcosl+gsinl,s2=1+h2+k2,μ是中心天体的引力常数,m是探测器质量,c为控制向量,c=[fr,f
t
,fn,t]
t
,fr,f
t
,fn分别发动机径向、切向、法向推力大小。
[0048]
步骤三:根据实际任务需求,给出考虑发动机关机和参数强非线性的连续推力轨迹优化问题的约束和性能指标。
[0049]
x(t0)=[1.495568e+11,-0.0038,0.0163,-2.4755e-5,2.2439e-6,13.1684](43)x(tf)=[2.081291e11,0.1576,0.3416,0.0110,-0.0384,8.1845](44)其中t0与tf分别为始末时间。同时,初始质量m(t0)=1217.7kg,末端质量m(tf)无约束。探测器的推力分量满足满足 (45)且(46)期望得到燃料最优连续推力轨迹,故将优化问题的性能指标设定为: (47)目的为最大化探测器末端质量,即最小化燃料消耗。
[0050]
综上所述,燃料最优小推力转移轨迹优化问题(也被称为p1)可总结为:约束方程:式(43)~(46)。
[0051]
步骤四:通过线性化动力学和松弛非线性等式约束,将连续推力轨迹优化问题凸化。
[0052]
为了将探测器动力学凸化,将非线性动力学方程(40)基小扰动的连续线性化方法近似。连续近似过程中第k次迭代存在一个解xk;然后,第k+1次迭代过程中,在xk存在的前提
下将动力学方程线性化,主项h(x)在xk附近线性化;故线性化后的动力学方程为:(48)其中;状态向量系数矩阵为:(49)其中,,,,;方程(45)中推力向量的非线性约束函数是非凸的;在运用凸优化方法前必须将其化为凸函数;故将式(45)中等号松弛为不等号,然后该约束就转化为凸约束,即:(50)从而,线性化后的动力学(48)、始末约束(43)(44)、凸约束(50)、性能指标(47)一起构成了凸子问题p2。
[0053]
步骤五:通过线性化动力学和松弛非线性等式约束,将考虑发动机关机和参数强非线性的连续推力轨迹优化问题凸化。
[0054]
采用梯形法对式(48)中数值积分进行转化,从而将问题p2转化为凸优化问题形式;将转移任务时间区间[t0,tf]划分为n+1个节点,第i个节点处探测器的状态量和控制量记为xi、ui,则变量集为[x0,
...,
x
i,...,
xn],待求解控制集为[c0,
...,ci
,
,...,cn
],则动力学积分(48)转化为(51)其中i=0,1,
…
,n-1,,,;从而,凸子问题p2转化为凸问题。
[0055]
对凸问题进行连续逼近以便迭代求解得到最优的考虑关机约束的变参数连续推力转移轨迹,直至其解收敛于p1的解。
[0056]
令k=0,给出初始状态向量的猜测值x0,由从初值x(t0)到终值x(tf)的直线获取;l(t)的猜测值选取从l(t0)到l(tf)+2∏
·
γ的一条直线,其中γ为连续推力转移轨迹运行圈数的估计值;m(t)的猜测值选取m(t0)到m(tf)的一条直线。
[0057]
对于第i+1次迭代,选取第k次迭代的解xk作为状态向量的猜测初值,解对为。
[0058]
检查是否满足收敛条件:(52)其中,其中,ρ为收敛精度要求;如果不满足式(52),需要继续迭代求解,如果满足式(52)即得到问题p1的解x
*
=x
k+1
、c
*
=c
k+1
,即得到考虑发动机定期关机约束和强非线性变化参数的连续推力轨迹优化问题的解,x
*
为最优转移轨迹,c
*
为对应的最优控制方向。
[0059]
经过优化,在13次迭代后满足收敛条件(52),得到探测器在转移过程中燃料消耗为292.6kg,发动机开机时长约20208h,考虑定轨约束发动机定期关机时能够准确到达末端约束处的状态。最优连续推力转移轨迹如图5所示,对应的最优推力幅值变化曲线如图6所示,其中阶梯状变化幅值与发动机推力特性相符,每条起于x轴的纵向竖线对应一次发动机开/关机,最优径向、切向、法向推力分量变化曲线如图7所示。作为对比,若发动机推力恒为90mn,比冲恒为3100s,则转移过程燃料消耗为293.5kg,发动机开机时长约38156h,燃耗相差不大,但是由于考虑发动机参数变化和关机时,转移过程中整体推力大小大于恒定推力场景,所以发动机开机时长更短。考虑发动机参数变化和关机的场景更加符合实际工程要求,定期的关机定轨使得探测器更精确到达目标位置。
[0060]
步骤六:根据步骤一至步骤五优化得到的最优转移轨迹及对应的最优控制方向,对实际工程中考虑定轨约束需定期关机以及发动机比冲和推力大小强非线性变化的连续推力场景适用性强,末端状态精度高。
[0061]
以上所述的具体描述,对发明的目的、技术方案和优点进行了进一步详细说明。需要理解的是,以上所述仅为本发明的具体实施示例,用于解释本发明,并不用于限定本发明的保护范围。凡在本发明的精神和原则之内所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1