基于自适应滑模变结构优化扩展卡尔曼滤波的SOC估算方法
基于自适应滑模变结构优化扩展卡尔曼滤波的soc估算方法
技术领域
1.本发明属于磷酸铁锂动力电池的技术领域,具体涉及一种基于自适应滑模变结构优化扩展卡尔曼滤波的soc估算方法。
背景技术:
2.锂电池荷电状态(soc)是电池管理系统(bms)的核心,bms是动力电池的核心,而动力电池是新能源汽车的核心,因此,soc的准确估算对新能源汽车至关重要。准确估算电池soc能够提高电池的安全性能,可以有效地保护电池,延长电池的循环使用寿命,提高电池的使用效率。
3.由于电动汽车动力电池在使用过程中受到各种内部因素和外部因素的影响,因此,准确估算soc具有很大难度。基于扩展卡尔曼滤波算法,结合开路电压、卡尔曼滤波修正算法的优点,利用扩展卡尔曼滤波法的修正功能,可以提高soc估算精度;但由于系统噪声的不确定性,导致扩展卡尔曼滤波算法稳定性差,从而影响soc估算精度。
4.滑模变结构控制算法通过控制量的切换,使系统状态沿着滑模面滑动,使系统在受到参数摄动和外干扰的时候具有不变性;由于不受参数和扰动的干扰,使得滑模变结构具有快速响应、鲁棒性好、可靠性高等优点;然而滑模变结构由于不可避免的惯性等原因,使得滑模变系统在光滑滑动模态上叠加一个自振,导致滑模变系统不能按照有效地按照预定的轨迹运动。
技术实现要素:
5.针对现有技术中存在不足,本发明提供了一种基于自适应滑模变结构优化扩展卡尔曼滤波的soc估算方法,克服了卡尔曼滤波的不稳定性,提高电池soc估算精度。
6.本发明是通过以下技术手段实现上述技术目的的。
7.基于自适应滑模变结构优化扩展卡尔曼滤波的soc估算方法,具体为:
8.设计自适应滑模变结构,确定基于指数趋近律的离散控制律为:
[0009][0010]
其中:矩阵ce=[c 1],c为滑模面斜率;a、b均为系数;xd(k)为输入变量;yd(k+1)是观测量,且yd(k+1)是位置指令,是位置指令的变化率;参数q》0,t是采样周期,s(k)是切换函数;
[0011]
将基于指数趋近律的离散控制律添加至离散状态方程:
[0012]
x(k+1)=f[x(k),u(k)+u(k)]+w(k)
[0013]
y(k)=g[x(k),u(k)+u(k)]+v(k)
[0014]
其中:x(k+1)为k+1时刻的输入状态变量,x(k)为k时刻的输入状态变量,y(k)为输出观测变量,w(k)是系统噪声,v(k)是观测噪声,u(k)为k时刻电池电压的输入向量;
[0015]
根据卡尔曼增益k(k)修正状态向量的估算值及协方差矩阵的估算值:
[0016][0017]
p(k)=[i-k(k)c(k)]p(k|k-1)
[0018]
其中:i为单位矩阵,c(k)是k时刻的标称容量;
[0019]
完成扩展卡尔曼滤波的优化,根据k时刻的输入状态变量xk=[u1(k)u2(k)soc(k)]
t
,利用优化后的扩展卡尔曼滤波估算动力电池的soc;
[0020]
其中:u1(k)为k时刻r1和c1两端的电压值,u2(k)为k时刻r2和c2两端的电压值,soc(k)是离散状态k时刻的动力电池荷电状态,r1和r2分别表示电池电化学极化、浓差极化产生的等效内阻,c1和c2分别表示电池电化学极化、浓差极化产生的等效电容。
[0021]
进一步的技术方案,所述位置指令yd(k+1)满足yd(k+1)=2yd(k)-yd(k-1),所述位置指令的变化率满足dyd(k+1)=2dyd(k)-dyd(k-1)。
[0022]
进一步的技术方案,所述切换函数s(k)满足离散系统指数趋近律s(k+1)=(1-qt)s(k)-εtsgn(s(k)),其中参数ε》0。
[0023]
更进一步的技术方案,所述s(k)=ce[yd(k)-xd(k)]。
[0024]
进一步的技术方案,所述离散状态方程是二阶rc等效电路模型的离散状态方程。
[0025]
本发明的有益效果为:本发明利用设计的自适应滑模变结构优化扩展卡尔曼滤波,克服卡尔曼滤波的不稳定性;利用优化后的扩展卡尔曼滤波估算电池soc,提高电池soc的估算精度。
附图说明
[0026]
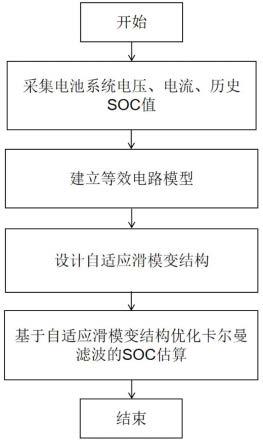
图1为本发明所述基于自适应滑模变结构优化扩展卡尔曼滤波的soc估算方法流程图;
[0027]
图2为本发明所述电池等效电路模型图。
具体实施方式
[0028]
下面结合附图以及具体实施例对本发明作进一步的说明,但本发明的保护范围并不限于此。
[0029]
如图1所示,本发明基于自适应滑模变结构优化扩展卡尔曼滤波的soc估算方法,主要包括电池等效电路建模、构建基于自适应滑模变结构的扩展卡尔曼滤波状态方程和基于自适应滑模变的扩展卡尔曼滤波算法的状态更新计算;具体步骤如下:
[0030]
s1,采集动力电池当前状态下的电压、电流、历史soc。
[0031]
s2,基于电池特性建立合适的等效电路模型
[0032]
电池模型应尽量完善表达实际电池的响应特性和内部特性;响应特性是指电池的端电压与负载电流的对应关系,内部特性是指电池的内部变量欧姆内阻、极化内阻、极化电压关系。为了有效地反映出电池的极化现象和欧姆现象,本发明选用图2所示的二阶rc等效电路模型,其数学表达式如下:
[0033]ul
=u
oc-u
1-u
2-ir0[0034]
[0035][0036]
其中:u
l
为电池的端电压,u
oc
表示电池的开路电压ocv,r0表示电池的欧姆电阻,r1和r2分别表示电池电化学极化、浓差极化产生的等效内阻,c1和c2分别表示电池电化学极化、浓差极化产生的等效电容,r1和c1等效为锂离子电极间传输时受到的阻抗,u1为r1和c1两端的电压值,r2和c2等效为锂离子电池在电极材料中扩散时受到的阻抗,u2为r2和c2两端的电压值,i为电池电流。
[0037]
s3,将等效电路模型的数学表达式离散化,得到二阶rc等效电路模型的离散状态方程:
[0038]
x
k+1
=akxk+bkik+ωk[0039]
yk=ckxk+duik+vk[0040]
其中:过程矩阵输入矩阵xk=[u1(k)u2(k)soc(k)]
t
是k时刻的输入状态变量,u1(k)为k时刻r1和c1两端的电压值,u2(k)为k时刻r2和c2两端的电压值,soc(k)是离散状态k时刻的动力电池荷电状态,ik是k时刻的输入控制变量,ωk是过程噪声,t是采样周期,c是标称容量,τ1、τ2为时间常数;测量矩阵电池的欧姆电阻随电池荷电状态变换的比例矩阵是,vk是系统噪声,yk=u
l
是输出观测变量。
[0041]
s4,自适应滑模变结构的设计
[0042]
①
设位置指令为yd(k)、其变化率为dyd(k),取(k),取采用线性外推的方法预测yd(k+1)以及dyd(k+1),即:
[0043]
yd(k+1)=2yd(k)-yd(k-1)
[0044]
dyd(k+1)=2dyd(k)-dyd(k-1)
[0045]
离散滑模控制的离散系统状态方程为:
[0046]
x(k+1)=ax(k)+bu(k)
[0047]
其中,x(k)是输入状态变量,u(k)输入控制律,a、b均为系数;
[0048]
离散滑模控制中切换函数设计为:
[0049]
s(k)=ce[yd(k)-xd(k)]
[0050]
其中:yd(k)是观测量,xd(k)为输入变量,矩阵ce=[c 1];则有:
[0051]
s(k+1)=ce(yd(k+1)-xd(k+1))
[0052]
=ce(yd(k+1)-axd(k)-bu(k))
[0053]
=ceyd(k+1)-ceaxd(k)-cebu(k)
[0054]
得到的控制律u(k)为:
[0055]
u(k)=(ceb)-1
(ceyd(k+1)-ceaxd(k)-s(k+1))
[0056]
②
对于连续滑模变结构控制,常用的趋近律为指数趋近律:
[0057]
[0058]
其中:参数ε》0,参数q》0;
[0059]
相应的,可以设计针对离散滑模控制的离散系统指数趋近律为:
[0060]
s(k+1)=(1-qt)s(k)-εtsgn(s(k))
[0061]
其中,1-qt》0。
[0062]
③
离散滑动模态存在和满足可达性的条件为:
[0063]
[s(k+1)-s(k)]sgn(s(k))=[-qts(k)-εtsgn(s(k))]sgn(s(k))=-qts(k)|-εts(k)|<0
[0064]
通过调整q、ε和c三个参数可以有效控制滑模变结构;其中,q主要影响切换函数的动态过渡过程,设计滑模面斜率c是为了保证滑模运动渐近稳定且具有较快的动态响应速度,ε是为了系统克服抖动及外干扰而设的主要参数。
[0065]
根据
②
得到离散系统趋近律:
[0066][0067]
只有当时,s(k)值才会递减;
[0068]
因此取并带入上述趋近律公式,得:
[0069][0070]
最后得到改进的基于指数趋近律的离散控制律为:
[0071]
u(k)=(ceb)-1
(ceyd(k+1)-ceaxd(k)-s(k)-ds(k))
[0072]
其中,
[0073]
s5,基于自适应滑模变结构优化扩展卡尔曼滤波的soc估算
[0074]
添加自适应滑模变结构的离散状态方程为:
[0075]
x(k+1)=f[x(k),u(k)+u(k)]+w(k)
[0076]
y(k)=g[x(k),u(k)+u(k)]+v(k)
[0077]
其中:w(k)是系统噪声,v(k)是观测噪声,u(k)为k时刻电池电压的输入向量。
[0078]
通过泰勒级数展开,得到新的线性化状态方程,从而得到基于自适应滑模变结构优化扩展卡尔曼的过程如下:
[0079]
k时刻状态变量的估算值和协方差矩阵的估算值分别为:
[0080][0081]
p(k|k-1)=a(k-1)p(k-1)a
t
(k-1)+q(k-1)
[0082]
增益k为:
[0083]
k(k)=p(k|k-1)c
t
(k)[c(k)p(k|k-1)c
t
(k)+r(k)]-1
[0084]
q为噪声ω的协方差,r为噪声υ的协方差;
[0085]
根据卡尔曼增益k修正状态向量的估算值及协方差矩阵的估算值:
[0086][0087]
p(k)=[i-k(k)c(k)]p(k|k-1)
[0088]
其中:i为单位矩阵。
[0089]
滤波初值和滤波误差方差矩阵的初值分别为x_((0))=e[x_((0))]、p_((0))=var[x_((0))]。
[0090]
根据k时刻的输入状态变量xk=[u1(k)u2(k)soc(k)]
t
,利用优化扩展卡尔曼滤波估算动力电池的soc。
[0091]
所述实施例为本发明的优选的实施方式,但本发明并不限于上述实施方式,在不背离本发明的实质内容的情况下,本领域技术人员能够做出的任何显而易见的改进、替换或变型均属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1