基于搜索算法的大型射电望远镜主动反射面板调节方法
1.本发明属于大型射电望远镜技术领域,特别涉及一种基于搜索算法的大型射电望远镜主动反射面板调节方法。
背景技术:
2.大型射电望远镜的工作原理是将天体发射的信号通过反射面板反射到馈源舱,从而观测到待测天体。将反射面调节为工作抛物面是整个主动反射技术的关键,在实际工程中将工作抛物面尽可能调节贴近理想抛物面以期获得最佳的接收效果。现有技术在工作抛物面调节为理想抛物面的优化过程中算法复杂度高,优化效果不理想。
技术实现要素:
3.为了克服上述现有技术的缺点,本发明的目的在于提供一种基于搜索算法的大型射电望远镜主动反射面板调节方法。在反射面板调节的种种约束下,确定一个理想抛物面,然后通过调节促动器的径向伸缩量,将反射面调节为工作抛物面,使得该工作抛物面尽可能接近理想抛物面。本方法具有算法复杂度低、目标函数与约束条件简单的特点。
4.为了实现上述目的,本发明采用的技术方案是:
5.一种基于搜索算法的大型射电望远镜主动反射面板调节方法,主动反射面在基准态时为基准球面,径向调节主索节点从而在工作态时形成工作抛物面,通过如下步骤使工作抛物面尽可能接近理想抛物面:
6.步骤1,以min(maxλ
η
)
γ
为目标函数,以以下条件为约束条件建立单目标优化模型:
7.min(maxλ
η
)
γ
[0008][0009]
目标函数意为:调节过程中,在所有的顶点、焦点组合情况下,求出每种组合情况的相邻两主索节点之间距离的最大变化幅度dete,在所有的最大变化幅度dete中取最小;
[0010]
参数定义如下:
[0011]
η:在所有的顶点、焦点组合情况下,以相邻两主索节点之间距离的最大变化幅度dete为目标,遍历所有对应的工作抛物面的次数;
[0012]
γ:对求得的最大变化幅度dete遍历的次数;
[0013]
δri:基准球面上的主索节点沿径向调节到工作抛物面的距离;
[0014]r1i
:球坐标系中,基准球面上主索节点的极径;
[0015]
(x
1i
,y
1i
,z
1i
):直角坐标系中,基准球面上主索节点的坐标;
[0016]r2i
:球坐标系中,顶点变动后的工作抛物面上主索节点的极径;
[0017]
(x
2i
,y
2i
,z
2i
):直角坐标系中,顶点变动后的工作抛物面上主索节点的坐标;
[0018]
q:主索节点径向伸缩量的极限;
[0019]
ψ:焦点可变极限位置下,反射光线与铅垂方向的最大夹角;
[0020]
δ:焦点的可调节范围;
[0021]
r:球坐标系中,顶点变动前的工作抛物面上主索节点的极径;
[0022]
f0:顶点变动前的工作抛物面的焦距;
[0023]
r:基准球面的半径;
[0024]
θ:顶点变动前的工作抛物面上,主索节点与原点的连线与z轴正方向之间的天顶角;
[0025]
f:顶点变动后的工作抛物面的焦距;
[0026]
θi:顶点变动后的工作抛物面上,主索节点与原点的连线与z轴正方向之间的天顶角
[0027]
ξ:工作抛物面的顶点沿径向移动的距离;
[0028]
θ
1i
:球面上主索节点与z轴正方向的夹角;
[0029]
球面上主索节点的极径在xoy平面上的投影与x正方向的夹角;
[0030]
|g
igi+1
|:主索节点调节之前相邻主索节点之间的距离;
[0031]
|g
′
ig′
i+1
|:主索节点调节之后相邻主索节点之间的距离;
[0032]
λi:径向调节主索节点前后,相邻主索节点之间距离的变化幅度;
[0033]
步骤2,采用基于变步长策略的遍历搜索算法对所述单目标优化模型进行求解,步骤如下:
[0034]
step1:利用搜索算法遍历求解
[0035]
设置r,设置焦点的z坐标变化量ddf和工作抛物面顶点的z坐标变化量df,对ddf和df进行遍历寻优,设置工作抛物面顶点到焦点的距离f=0.466
×
r+ddf+df;
[0036]
step2:寻找设定口径范围内的点
[0037]
判断主索节点是否处于设定口径范围内,将处于设定口径范围内的主索节点由三维坐标系x、y,z转化为球坐标系r、θ、计算主索节点对应工作抛物面上点的极径,为并由此计算出主索节点的径向调节量和调节后的三维坐标,主索节点的最大径向调节量为w,a=(sin(θ))2,b=-4
×f×
cos(θ),c=-4
×f×
(r+df);
[0038]
step3:计算调节前后相邻主索节点距离的变化幅度
[0039]
判断反射面板对应的每一主索节点是否在设定口径范围内,若在,返回此时判断的数字形式的主索节点编号;若不在范围内,返回0,记录至矩阵a,矩阵a是一个多行三列的矩阵,其每行的三个元素表示一个三角形反射面板的三个顶点所对应主索节点在设定口径范围内的情况,由其主索节点调节前的极径减去调节后的极径获取,若元素大于0,表示该顶点所对应的主索节点在设定的口径范围内;若矩阵a中每行的三个元素均大于零,则表示此三个元素对应的三角形整体位于设定口径范围内,计算主索节点由基础位点改变至理想位点后相邻主索节点间变化幅度,最大变化幅度为dete;
[0040]
step4:变化幅度和最大径向调节量作为约束条件
[0041]
对最大变化幅度dete寻优,当最大变化幅度dete满足小于设定值m时,判断最大径向调节量w是否满足小于设定值n,记录符合条件的工作抛物面顶点位置、焦点位置、主索节点的最大径向调节量w和所述最大变化幅度dete;
[0042]
step5:返回step1变步长遍历寻优
[0043]
调节步长,将step4中得到符合条件的工作抛物面顶点位置、焦点位置带入step1,并设置小步长(步长越小,精度越高),得到更精确的主索节点的最大径向调节量w和最大变化幅度dete。
[0044]
在实施例中,所述step2的判断方法:
[0045]
将主索节点投影到xoy平面上,判断主索节点在xoy平面上到原点o的距离,若小于设定口径的1/2,则该主索节点在设定口径范围内,并将这些点存储在矩阵b中,以便后续调
用,所述矩阵b中各元素代表在设定口径范围内点的数字编号。
[0046]
在实施例中,所述step2主索节点的径向调节量的计算方法:
[0047]r1i
由提供的三维坐标得到;在工作抛物面的顶点和焦点确定后,工作抛物面的方程由球坐标形式表示,再由一元二次方程求出r
2i
,调节前后主索节点极径之差δri即为主索节点的径向调节量,调节后的三维坐标由公式计算得到。
[0048]
与现有技术相比,本发明的有益效果是:
[0049]
本发明在构建反射面板调节模型时,创新性地将主索节点落在理想抛物面上作为约束,而将主索最大形变最小作为优化目标,在降低了算法复杂度的前提下,收获了很好的优化效果。
附图说明
[0050]
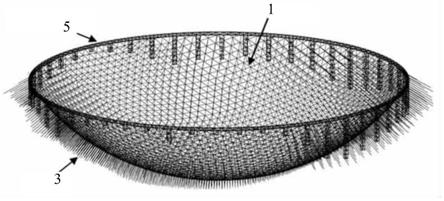
图1是大型射电望远镜结构示意图。
[0051]
图2是大型射电望远镜局部结构示意图(轴测图)。
[0052]
图3是大型射电望远镜局部结构示意图(正视图)。
[0053]
图4是大型射电望远镜局部结构示意图(俯视图)。
[0054]
图5是大型射电望远镜在观测时的剖面示意图。
[0055]
图6是本发明建立的球坐标系。
具体实施方式
[0056]
下面结合附图和实施例详细说明本发明的实施方式。
[0057]
参考图1、图2、图3和图4,大型射电望远镜由主动反射面系统、信号接收系统(馈源舱)以及相关的控制、测量和支承系统组成,其中主动反射面系统是由主索网1、反射面板2、下拉索3、促动器4及周边支承结构5等主要部件构成的一个可调节球面。主索网1由柔性的主索6按照短程线三角网格方式构成,用于支承反射面板2及其背架结构7,每个三角网格上安装一块反射面板2及其背架结构7,整个索网固定在周边支承结构5上。各主索6的连接点为主索节点8,每个主索节点8连接一根下拉索3,下拉索3下端与固定在地表的促动器4连接,实现对主索网1的形态控制。相邻反射面板2间有一定缝隙,能够确保反射面板2在变位时不会被挤压、拉扯而变形。
[0058]
参考图5,主动反射面可分为两个状态:基准态和工作态。基准态时反射面为半径r的球面,即基准球面;工作态时反射面的形状被调节为一个口径d的近似旋转抛物面,即工作抛物面。基准球面的球心为c,馈源舱接收平面的中心只能在与基准球面同心的一个球面(即焦面)上移动,两同心球面的半径差为f=0.466r(其中r为基准球面半径,称f/r为焦径比)。馈源舱接收信号的有效区域为一个中心圆盘。当大型射电望远镜观测某个方向的天体目标s时,馈源舱接收平面的中心被移动到直线sc与焦面的交点p处,调节基准球面上的部分反射面板2形成以直线sc为对称轴、以p为焦点的近似旋转抛物面,从而将来自天体目标s的平行电磁波反射汇聚到馈源舱的有效区域。
[0059]
将反射面调节为工作抛物面是主动反射面技术的关键,该过程通过下拉索3与促动器4配合来完成。下拉索3长度固定。促动器4沿基准球面径向安装,其底端固定在地面,顶端可沿基准球面径向伸缩来完成下拉索3的调节,从而调节反射面板2的位置,最终形成工作抛物面。
[0060]
在反射面板2调节约束下,确定一个理想抛物面,然后通过调节促动器4的径向伸缩量,将反射面调节为工作抛物面,本发明的优化目标是使该工作抛物面尽可能接近理想抛物面,以获得天体电磁波经反射面反射后的最佳接收效果。
[0061]
为此,本发明采取的方法如下:
[0062]
步骤1,理想抛物面优化调节的数学模型初始化
[0063]
将本发明优化目标转化为工作状态下主动反射面的主索节点处于求解得出的理想抛物面上。即,通过将主索节点落在理想抛物面上作为约束,而将相邻两主索节点之间距离的最大变化幅度dete中取最小作为优化目标,建立单目标优化模型。以基准球面的球心为原点,建立球坐标系。参考图6,r表示顶点变动前的工作抛物面上主索节点的极径,表示以x轴正方向为基准,逆时针旋转到方向上的角度。令点p(x
1i
,y
1i
,z
1i
)位于基准球面上,则存在:
[0064][0065]
式中,r
1i
表示基准球面上主索节点的极径,(x
1i
,y
1i
,z
1i
)表示直角坐标系中基准球面上主索节点的坐标;i=1,2
……
n,n表示基准球面上包含的主索节点数。若要在球坐标系中表示一个确定的点,还需要两个角度。
[0066][0067]
式中,θ
1i
表示球面上主索节点与z轴正方向的夹角,即图中方向与z轴正方向的夹角。
[0068][0069]
式中,表示球面上主索节点的极径在xoy平面上的投影与x正方向的夹角,即图中方向与x轴正方向的夹角。
[0070]
综上所述,基准球面上主索节点的位置用球坐标表示为
[0071]
进一步地,考虑天体目标s位于基准球面正上方的特殊情况,使得天体目标s与馈源舱所在的直线与基准球面的交点k为工作抛物面顶点,得到该状态下工作抛物面的方程为(基于三维笛卡尔坐标系):
[0072]
x2+y2=4f0(z+r)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
4)
[0073]
式中,f0表示顶点变动前的工作抛物面的焦距,也即理想抛物面的焦距,示例地,f0=0.466r,r表示基准球面的半径,将式4)转化到球坐标系下表示为:
[0074]
r2sin2θ-4f0rcosθ-4f0r=0
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
5)
[0075]
由式5)可以推出:
[0076]
[0077]
上式可由一元二次方程的求根公式推导出。
[0078]
考虑主索节点的径向移动变位:
[0079]
由于需要考虑反射面板的调节因素,即下拉索的拉动会导致主索节点的位移变动,进而影响反射面板的调节。假定理想抛物线的顶点k下移ξ米,移动之后抛物面的方程为
[0080]
x2+y2=4f(z+r+ξ)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
7)
[0081]
式中,f为顶点变动后的工作抛物面的焦距,f=f0+ξ,ξ为工作抛物面的顶点沿径向移动的距离。则经过顶点变动后的工作抛物面上任意主索节点对应的极径
[0082][0083]
则基准球面上的主索节点沿径向调节到工作抛物面的距离为
[0084]
δri=|r
1i-r
2i
|
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
9)
[0085]
考虑相邻节点之间距离的微小变化:
[0086]
基准球面经过下拉索的调节之后,得到工作抛物面。本发明的目的是使得工作抛物面与理想抛物面尽可能贴近,使得主索节点位于理想抛物面上,即工作抛物面上相应的主索节点也在求出的理想抛物面上,极径为r
2i
。由于促动器带动主索节点调节的方向为径向,所以工作抛物面上对应的主索节点的角度θi、仍然不变。设工作抛物面上主索节点对应的空间坐标为gi′
(x
2i
,y
2i
,z
2i
),其中
[0087][0088]
(x
2i
,y
2i
,z
2i
)表示直角坐标系中,顶点变动后的工作抛物面上主索节点的坐标。
[0089]
进一步地,基准球面上主索节点的坐标为gi(x
1i
,y
1i
,z
1i
)。则主索节点调节之前相邻主索节点之间的距离为
[0090][0091]
主索节点调节之后相邻主索节点之间的距离为
[0092][0093]
综上所述,主索节点调节前后的相邻节点之间的距离变化幅度为
[0094][0095]
步骤2,建立单目标优化模型
[0096]
基于将主索节点放置在所求的理想抛物面上,因此所得的理想抛物线很难满足主索节点之间距离变化幅度的限制条件,因此取最优解,使得主索节点变化幅度尽可能小,建立如下基于变步长搜索算法的单目标优化模型。
[0097]
目标函数:调节过程中,在所有的顶点、焦点组合情况下,求出每种组合情况的相邻两主索节点之间距离的最大变化幅度dete,在所有的最大变化幅度dete中取最小,表达为min(maxλ
η
)
γ
,其中ηγ表示模型中遍历理想抛物面的序数。具体地,η表示在所有的顶点、焦点组合情况下,以相邻两主索节点之间距离的最大变化幅度dete为目标,遍历所有对应
的工作抛物面的次数;γ则表示对求得的最大变化幅度dete遍历的次数。
[0098]
约束条件:
[0099]
a)主索节点径向伸缩量在-0.6~+0.6米之间,即
[0100]
δri=|r
1i-r
2i
|≤0.6
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
14)
[0101]
b)模型中理想抛物面焦点变化数值符合推导的范围
[0102][0103]
c)基准状态下,所有主索节点均位于基准球面上
[0104][0105]
d)顶点位于k点的工作抛物面上任意一点的极径
[0106][0107]
e)其它几何关系
[0108]
综上所述,建立单目标优化模型。
[0109]
min(maxλ
η
)
γ
[0110][0111]
式中q表示主索节点径向伸缩量的极限,本实施例取0.6m;ψ表示焦点可变极限位置下,反射光线与铅垂方向的最大夹角;δ表示焦点的可调节范围;θ表示顶点变动前的工作抛物面上,主索节点与原点的连线与z轴正方向之间的天顶角;θi表示顶点变动后的工作抛
物面上,主索节点与原点的连线与z轴正方向之间的天顶角;λi表示径向调节主索节点前后,相邻主索节点之间距离的变化幅度。
[0112]
步骤3,设计基于变步长策略的遍历搜索算法进行求解,步骤如下:
[0113]
step1:数据预处理
[0114]
将主索节点编号进行转化,主要是将非数字编号转化为数字编号,例如,可将编号a、b、c、d、e分别转化为1、2、3、4、5,又例如,可将编号“a0”转化为“10”。
[0115]
step2:利用搜索算法遍历求解
[0116]
设置r,示例地,可取r=300.4m,设置焦点z坐标变化量ddf和工作抛物面顶点的z坐标变化量df,df=-0.6:0.01:0.6。对ddf和df进行遍历寻优。设置工作抛物面顶点到焦点的距离f=0.466
×
r+ddf+df。
[0117]
step3:寻找设定口径范围内的点
[0118]
判断主索节点是否处于设定口径范围内,处于设定口径范围内的主索节点由三维坐标系x、y、z转化为球坐标系r、θ、计算主索节点对应理想抛物面上点的极径,为并由此计算出主索节点的径向调节量和调节后的三维坐标,主索节点的最大径向调节量为w。a=(sin(θ))2,b=-4
×f×
cos(θ),c=-4
×f×
(r+df)。
[0119]
示例地,本步骤中,判断方法如下:
[0120]
将主索节点投影到xoy平面上,判断主索节点在xoy平面上到原点o的距离,若小于设定口径的1/2,则该主索节点在设定口径范围内,并将这些点存储在矩阵b中,以便后续调用,所述矩阵b中各元素代表在设定口径范围内点的数字编号。
[0121]
示例地,本步骤中,主索节点的径向调节量的计算方法如下:
[0122]r1i
由提供的三维坐标得到;在工作抛物面的顶点和焦点确定后,工作抛物面的方程由球坐标形式表示,再由一元二次方程求出r
2i
,调节前后主索节点极径之差δri即为主索节点的径向调节量,调节后的三维坐标由公式计算得到。
[0123]
step4:计算调节前后相邻主索节点距离的变化幅度
[0124]
判断反射面板对应的每一主索节点是否在口径范围内,若在,返回此时判断的主索节点的数字形式的编号;若不在范围内,返回0,记录至矩阵a。矩阵a是一个多行三列的矩阵,其每行的三个元素表示一个三角形反射面板的三个顶点所对应主索节点在设定口径范围内的情况,由其主索节点调节前的极径减去调节后的极径获取,若元素大于0,表示该顶点所对应的主索节点在设定的口径范围内。若矩阵a中每行的三个元素均大于零,则表示此三个元素对应的三角形整体位于设定口径范围内,计算主索节点由基础位点改变至理想位点后相邻主索节点间变化幅度,最大变化幅度即为dete。
[0125]
step5:变化幅度和最大径向调节量作为约束条件
[0126]
对最大变化幅度dete寻优,当最大变化幅度dete满足小于设定值m时,判断最大径向调节量w是否满足小于设定值n,记录符合条件的工作抛物面顶点位置、焦点位置、主索节点的最大径向调节量w和所述最大变化幅度dete。示例地,m取0.07%,n取0.6。示例地,可将每个计算出来的主索节点径向调节量在matlab中利用max函数比较出所有径向调节量的最
大值。
[0127]
step6:返回step2变步长遍历寻优
[0128]
调节步长,将step5中得到的符合条件的工作抛物面顶点位置、焦点位置带入step2,并设置小步长,得到更精确的主索节点的最大径向调节量w和最大变化幅度dete。
[0129]
本发明在构建反射面板调节模型时,将主索节点落在理想抛物面上作为约束,通过对顶点和焦点所有组合情况的遍历搜索,在顶点和焦点的可变范围中,搜索到一种顶点和焦点组合情况,使得所对应的工作抛物面上的相邻主索节点最大的变化幅度最小,即该工作抛物面为所优化的的理想抛物面。所优化得到的抛物面具有接受来自天体信号接收比高,算法复杂度低的优点。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1