一种用于空中交通管制的ADS-B攻击检测方法
一种用于空中交通管制的ads-b攻击检测方法
技术领域
1.本发明属于数据攻击检测领域,尤其是涉及一种用于空中交通管制的ads-b攻击检测方法。
背景技术:
2.ads-b系统在设计之初就缺乏网络安全方面的考虑,伴随着空地两端ads-b系统的大量部署和组网融合使用,ads-b协议的开放性给飞行安全带来了严峻的网络安全威胁。实验证明,攻击者可利用ads-b协议的安全漏洞实施篡改、重放、拒绝服务等攻击,严重影响了信息的机密性、数据的完整性和系统的可用性,更严重的是攻击者可以通过攻击ads-b系统影响飞机驾驶系统或地面管制系统,扰乱驾驶员或管制员的正常工作,降低飞行效率和安全性。
3.在现有技术条件下,yogesh anil nijsure等人提出了一种多源定位技术,通过aoa、tdoa和fdoa特征来实现混合地理定位机制,提供精确的飞机地理位置估计,赋予当前基于ads-b的地理定位框架显著弹性,可抵御基于ads-b的网络攻击。nirnimesh ghose等人提出了一种基于物理层的信号验证方法,该方法利用ads-b传输的射频属性来验证飞机的速度和位置,识别筛选出异常现象。thabet kacem等人提出了一种可扩展ads-b协议的解决方案,开发了一个基于密钥哈希消息验证码的安全元数据加密模块,该方案适用于空对地和空对空场景的密钥交换机制,通过加强ads-b消息的真实性和完整性来解决ads-b系统安全性低的问题。
4.但现有的ads-b数据攻击检测方法,通常存在着以下问题:一是ads-b数据以及飞行计划数据具有大规模海量数据特点,现有的ads-b攻击检测方法存在着处理速度慢,准确度低的问题;二是现有的ads-b攻击检测方法违背atc的运行规则,有效攻击缺乏严格验证分析;三是现有的ads-b攻击检测方法,检测结果输出不直观清晰,不方便相关人员及时关注处理。
技术实现要素:
5.有鉴于此,本发明旨在提出一种用于空中交通管制的ads-b攻击检测方法,在ads-b数据的基础上,结合飞行计划数据,构建空域图像流,利用搭建的gan-lstm模型预测图像,并通过ncc相似度值进行可疑图像识别标注,筛选出异常目标,具有数据处理速度快、符合atc的运行规则以及检测结果输出直观清晰的特点。
6.为达到上述目的,本发明的技术方案是这样实现的:一种用于空中交通管制的ads-b攻击检测方法,包括:步骤1:数据采集与处理:采集ads-b飞行数据和飞行计划数据,如果相对应的ads-b飞行数据的航班呼号与飞行计划数据航班呼号不相同,则直接判定为非法数据;如果相对应的ads-b飞行数据的航班呼号与飞行计划数据航班呼号相同,则进一步计算偏离程度dev值,偏离程度dev值与ads-b飞行数据中的位置信息、飞行高度、速度、航向组成数据组;其
中,dev = max (dd, d
t
, dv) ,dev值取dd, d
t
, dv三者之间的最大值;dd是ads-b飞行数据和飞行计划数据之间的航迹偏差,d
t
是ads-b飞行数据和飞行计划数据之间的时间偏差,dv是ads-b飞行数据和飞行计划数据之间的速度偏差;步骤2:建立图像集:把数据组投影成三角形的空域图像,三角形的顶点代表飞机的位置信息,三角形的高代表飞行高度,三角形的底边代表飞机的速度,三角形的底边中线代表飞机的航向,三角形的颜色值代表偏离程度dev值,连续空域图像组成图像集;步骤3:建立gan-lstm预测模型: gan-lstm预测模型包括生成器以及判决器;生成器包括卷积模块,lstm神经网络模块以及反卷积模块;图像集作为输入样本图像,通过卷积模块计算不断提取重要特征,输入到lstm神经网络模块,lstm神经网络模块输出的预测数据通过反卷积模块生成预测图像输入到判决器中的cnn卷积神经网络模型,cnn卷积神经网络模型使用预测图像与样本图像进行监督性训练,通过判定误差更新模型权值;lstm神经网络模块通过自身误差以及cnn卷积神经网络模型的判定误差更新模型权值;步骤4:输入实时的图像数据到建立的gan-lstm预测模型中,输出预测图像;步骤5:ncc相似度值评估及图像标注:首先将对应的预测图像和样本图像分别均匀分割成n
ꢀ×ꢀ
n的图像子块,分别计算对应位置图像子块的之间的ncc相似度值;当所有对应位置图像子块的ncc相似度值均大于异常阈值时,样本图像被判断成正常帧,不进行图像标注;当任一对应位置的图像子块的ncc相似度值小于或等于异常阈值时,则该样本图像判定成可疑帧,进一步提取该可疑帧为中心的样本图像序列,统计该样本图像序列内已被判定为可疑帧的数量,如果没有超过判定阈值,则该可疑帧不进行图像标注;如果超过判定阈值,则该可疑帧进行图像标注;ncc相似度值计算方式如下:其中,m是一个图像子块的总像素数,f(i,j)代表样本图像子块中像素点(i,j)的像素值,t(i,j)代表预测图像子块中像素点(i,j)的像素值,μf是样本图像子块像素平均值,μ
t
是预测图像子块像素平均值,σf是样本图像子块像素值标准差,σ
t
是预测图像子块像素值标准差。
7.相对于现有技术,本发明公开的一种用于空中交通管制的ads-b攻击检测方法,具有以下优势:第一,本发明公开的一种用于空中交通管制的ads-b攻击检测方法,可以在ads-b数据的基础上,结合飞行计划数据,构建空域图像流,实现ads-b数据与飞行计划数据融合后的图形化处理,提升了数据处理过程的直观性,为后期攻击检测结果的图形化输出提供了基础。
8.第二,本发明公开的一种用于空中交通管制的ads-b攻击检测方法,建立了包括生成器以及判决器的gan-lstm预测模型,有效提高了数据处理的效率以及预测质量。
9.第三,本发明公开的一种用于空中交通管制的ads-b攻击检测方法,可以对可疑空域图像进行即时标注,具有检测结果输出直观,方便相关人员及时关注处理的特点。
附图说明
10.构成本发明的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。
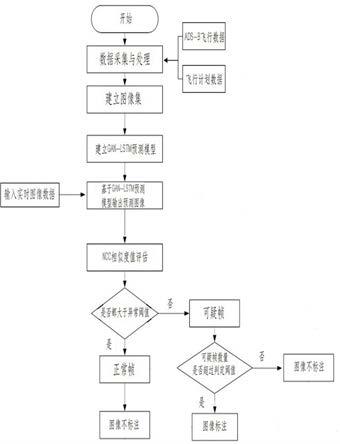
11.在附图中:图1为本发明实施例所述的一种用于空中交通管制的ads-b攻击检测方法流程示意图;图2为本发明实施例所述的一种用于空中交通管制的ads-b攻击检测方法原理示意图;图3为本发明实施例所述的一种用于空中交通管制的ads-b攻击检测方法空域图像示意图;图4为本发明实施例所述的一种用于空中交通管制的ads-b攻击检测方法图像标注示意图。
具体实施方式
12.需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
13.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”等的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。
14.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以通过具体情况理解上述术语在本发明中的具体含义。
15.下面将参考附图并结合实施例来详细说明本发明。
16.如图1及图2所示,一种用于空中交通管制的ads-b攻击检测方法,包括:步骤1:数据采集与处理:采集ads-b飞行数据和飞行计划数据,如果相对应的ads-b飞行数据的航班呼号与飞行计划数据航班呼号不相同,则直接判定为非法数据;如果相对应的ads-b飞行数据的航班呼号与飞行计划数据航班呼号相同,则进一步计算偏离程度dev值,偏离程度dev值与ads-b飞行数据中的位置信息、飞行高度、速度、航向组成数据组;在本实施例中,位置信息是经纬度信息。
17.其中,dev = max (dd, d
t
, dv) ,dev值取dd, d
t
, dv三者之间的最大值;dd是ads-b飞行数据和飞行计划数据之间的航迹偏差,d
t
是ads-b飞行数据和飞行计划数据之间的时间偏差,dv是ads-b飞行数据和飞行计划数据之间的速度偏差;
步骤2:建立图像集:把数据组投影成三角形的空域图像,三角形的顶点代表飞机的位置信息,三角形的高代表飞行高度,三角形的底边代表飞机的速度,三角形的底边中线代表飞机的航向,三角形的颜色值代表偏离程度dev值,连续空域图像组成图像集;
18.在另一个实施中,为了在空域图像上更好的识别高度的异常变化,可以设定了正常的阈值范围,当高度变化超过该阈值时,将高度在原始数值基础上扩大一倍,突出空域图像中高度变化的明显性。
19.步骤3:建立gan-lstm预测模型: gan-lstm预测模型包括生成器以及判决器;生成器包括卷积模块,lstm神经网络模块以及反卷积模块;图像集作为输入样本图像,通过卷积模块计算不断提取重要特征,输入到lstm神经网络模块,lstm神经网络模块输出的预测数据通过反卷积模块生成预测图像输入到判决器中的cnn卷积神经网络模型,cnn卷积神经网络模型使用预测图像与样本图像进行监督性训练,通过判定误差更新模型权值;lstm神经网络模块通过自身误差以及cnn卷积神经网络模型的判定误差更新模型权值;在本实施例中,样本图像以及预测图像的尺寸均是128*128。
20.在本实施例中,cnn卷积神经网络模型使用预测图像与样本图像进行监督性训练,其中预测图像标签值为0,样本图像标签值为1。
21.步骤4:输入实时的图像数据到建立的gan-lstm预测模型中,输出预测图像;步骤5:ncc相似度值评估及图像标注:首先将对应的预测图像和样本图像分别均匀分割成n
ꢀ×ꢀ
n的图像子块,分别计算对应位置图像子块的之间的ncc相似度值,ncc相似度值越大,两个对应位置图像子块相似度越高,在本实施例中n=3,当所有对应位置图像子块的ncc相似度值均大于异常阈值时,样本图像被判断成正常帧,不进行图像标注;当任一对应位置的图像子块的ncc相似度值小于或等于异常阈值时,则该样本图像判定成可疑帧,进一步提取该可疑帧为中心的样本图像序列,统计该样本图像序列内已被判定为可疑帧的数量,如果没有超过判定阈值,则该可疑帧不进行图像标注;如果超过判定阈值,则该可疑帧进行图像标注。
22.在本实施例中,如图3所示,空域图像表示某一时刻飞行器的飞行姿态,偏离程度dev值对应三角形的颜色rgb值中的r值。
23.在本实施例中,如图4所示,样本图像序列选择为五幅图像,预测图像和样本图像分别均匀分割成3
ꢀ×ꢀ
3的图像子块。
24.ncc相似度值计算方式如下:其中,m是一个图像子块的总像素数,f(i,j)代表样本图像子块中像素点(i,j)的像素值,t(i,j)代表预测图像子块中像素点(i,j)的像素值,μf是样本图像子块像素平均值,μ
t
是预测图像子块像素平均值,σf是样本图像子块像素值标准差,σ
t
是预测图像子块像素值标准差。
25.在步骤1中:d
d = d
ꢀ×ꢀ
sin (θ
t
) / d
d-up-bound
d为ads-b飞行数据中位置信息与飞行计划数据中位置信息的距离,θ
t 为ads-b飞
行数据中航向与飞行计划数据中航向的差值, d
d-up-bound
为atc规则中水平航路偏离的上限;d
t = (d
ꢀ×ꢀ
cos (θ
t
) / v
i ) / d
t-up-bound
d为ads-b飞行数据中位置信息与飞行计划数据中位置信息的距离,vi表示ads-b飞行数据中速度,θ
t 为ads-b飞行数据中航向与飞行计划数据中航向的差值,d
t-up-bound
表示飞行计划允许航空器到达下一导航台的时间偏差上限值;d
v = |(viꢀ–ꢀ
v0) / v0)| / d
v-up-bound
其中v0是飞行计划数据中速度,vi是ads-b飞行数据中速度,d
v-up-bound 表示速度偏差的上限。
26.在步骤3中:对判决器的cnn卷积神经网络模型进行优化,使用的对抗损失函数如下:其中, 是预测图像,是样本图像,是样本图像的标签值,是预测图像经过判决器cnn卷积神经网络模型的判定值;在本实施例中,通过反向传播可以帮助cnn卷积神经网络模型调整更新权重等重要参数,最终目的是使对抗损失函数最小。
27.继续对生成器的lstm神经网络模块进行优化,使用的目标函数l如下:权重系数均不为零;重构损失函数如下:其中,是预测图像,是样本图像,n是样本图像的像素总数,是样本图像中像素点(i,j)的像素值,是预测图像中像素点(i,j)的像素值;梯度损失函数如下:
其中,是预测图像,是样本图像,是预测图像中像素点(i,j)的像素值,是预测图像中像素点(i-1,j)的像素值,是预测图像中像素点(i,j-1)的像素值,是样本图像中像素点(i,j)的像素值,是样本图像中像素点(i-1,j)的像素值,是样本图像中像素点(i,j-1)的像素值。
28.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1