耦合多点测风仪和微尺度稳态模拟的高分辨率山地风场测量方法
1.本发明属于风场测量技术领域,具体的为一种耦合多点测风仪和微尺度稳态模拟的高分辨率山地风场测量方法。
背景技术:
2.近年来,随着我国双碳目标的提出,风能等清洁能源的需求不断增大,而风资源的准确评估又是风能发展中很重要的一环。目前对风资源评估的方法中,cfd数值方法因其成本低、效率高而被广泛采用。cfd数值计算方法对于平地风场求解较为准确,但对于复杂地形风场,由于其地形效应明显,会导致cfd数值模拟的风速和实测风速不匹配问题,因此亟待提出一种方法,来解决此问题。
3.目前一般通过单点实测风速来寻找匹配的入流风速,进而使整个流场的风速与实测风速相匹配。但此方法有以下不足:第一,该方法的效果有待验证;第二,该方法假设入流风剖面为对数率,在地形效应明显时,真实的入流风剖面未必为对数率风剖面,因此该方法精度有限。
技术实现要素:
4.有鉴于此,本发明的目的在于提供一种耦合多点测风仪和微尺度稳态模拟的高分辨率山地风场测量方法,采用多点实测风速进行迭代优化的策略,以解决实测风速和数值模拟风速不匹配的问题。
5.为达到上述目的,本发明提供如下技术方案:
6.一种耦合多点测风仪和微尺度稳态模拟的高分辨率山地风场测量方法,包括如下步骤:
7.1)采用单点迭代方法,求解每个风速计的实测数据的入流风向角;
8.2)根据入流风向角,按照对数率风剖面得到入流风速(u
in
,v
in
);
9.3)利用入流风速(u
in
,v
in
)计算得到风场内的速度u(i,j,k),将u(i,j,k)插值得到每个风速计所在高度z处的速度(uz,vz);
10.4)采用pi控制法迭代优化,计算误差:
[0011][0012]
其中,e表示误差;n表示迭代次数;z表示风速计所在高度;(u
zref
,)为高度为z的风速计的实测风速;判断误差e是否满足收敛条件:若是,则停止迭代,以当前迭代步对应的入流风速(u
in
,v
in
)确定风剖面作为风场的入流条件;若否,则执行步骤5);
[0013]
5)引入pi控制参数:
[0014]
[0015]
其中,为比例系数;为积分系数,作用为减小因调节作用不够时产生的稳态误差;e(z,j)表示第j次迭代z高度风速计处的误差;
[0016]
得到第n+1次迭代的入流风速:
[0017]
(u
in
,v
in
)
n+1
=λ
pi,t
(z,n)+(u
in
,v
in
)n[0018]
6)令n=n+1,循环执行步骤3)。
[0019]
进一步,所述步骤1)中,实测数据的入流风向角的求解方法为:
[0020]
(1)生成初始apg图(anemometer phase graph,风速仪相位图),设任一风速计位置处的速度测量值为(u0,v0),经其模||u0||归一化处理后为(u0,v0),在apg图中以p0表示这个点;
[0021]
(2)判断apg曲线上是否有至少一个点与点p0之间的距离小于等于设定阈值:若是,则以apg曲线上距离点p0最近的点t0作为点p0的近似,由t0点所对应的入流速度(u
t0
,v
t0
)得到入流风向角以此入流风向角θ0近似为p0点对应的入流风向角;若否,则执行步骤(3);
[0022]
(3)将点pi投影到距离其最近的apg曲线片段上,投影点记为tm,将该apg曲线片段的两个端点记为t
1m
和t
2m
,则:
[0023][0024]
其中,rm的范围为[0,1],其描述了点tm在apg曲线片段上的相对位置;
[0025]
(4)计算无量纲边界风速大小的分量:
[0026][0027][0028]
其中,和分别表示边界风速在水平面纵向方向和横向方向上的无量纲参数;(u
b1m
,v
b1m
)是apg图上点t
1m
对应的边界速度,(u
b2m
,v
b2m
)是apg图上点t
2m
对应的边界速度;
[0029]
(5)使用计算无量纲流场
[0030]
(6)对无量纲流场进行插值计算得到风速计位置的无量纲速度
[0031]
(7)计算的模并用其对和进行归一化,得到(u
am
,v
am
)、(u
bm
,v
bm
);
[0032]
(8)在apg图中插入坐标为(u
am
,v
am
)的点pm,点pm对应的入流速度为(u
bm
,v
bm
);判断点pm和最初的点p0之间距离是否小于等于设定阈值;若是,则停止迭代,执行步骤(9);若否,
则m=m+1,以pm代替pi循环执行步骤(3);
[0033]
(9)根据点pm对应的入流速度(u
bm
,v
bm
),得到入流风向角以入流风向角θm近似为点p0所对应的风向角。
[0034]
进一步,所述步骤(1)中,生成初始apg图的方法为:
[0035]
①
将对数率入流条件用u
ref
、z
ref
进行无量纲化后有:
[0036][0037]
其中,u
ref
表示参考风速;z
ref
表示参考高度;表示无量纲高度处水平面的纵向无量纲风速;表示无量纲高度处水平面的横向无量纲风速;表示无量纲高度;z
ref
表示参考高度;z0表示地面粗糙长度;
[0038]
②
计算参考高度z
ref
处无量纲化后的入流速度分量:
[0039]
③
数值计算无量纲流场,每个网格节点的无量纲速度向量用表示;
[0040]
④
对无量纲速度向量用进行插值计算,得到风速计位置的无量纲流场
[0041]
⑤
计算的模由于流场的相似性,整个速度场可以被线性缩放以来归一化,有:
[0042][0043][0044][0045]
其中,(ua,va)为apg图中的坐标点,相应的(ub,vb)对应其入流风速,入流风向角为:
[0046]
在步骤
②
中选取多个入流风向角,得到多个坐标点用以生成初始apg图,初始apg图中的每个坐标点的入流风向角均是已知的。
[0047]
进一步,在步骤
②
选取的入流风向角均匀覆盖0~360
°
。
[0048]
本发明的有益效果在于:
[0049]
本发明耦合多点测风仪和微尺度稳态模拟的高分辨率山地风场测量方法,利用单点迭代寻优加多点pi控制法,迭代优化得到入流风剖面的形状,原理为:通过单点迭代法获得入流风向角之后,cfd计算可得测风塔处模拟的风剖面,多点实测数据可得测风塔处真实
的风剖面,在pi控制法的基础上,将两个风剖面的误差不停叠加至cfd计算的入流风剖面上,循环迭代,直至误差小于等于阈值则可得此时对应的真实入流风剖面;pi控制法的引入使迭代较为柔和,以保证较好的收敛性。最终使得实测风速和模拟风速相匹配,特别适用于复杂地形风场中,由于地形效应导致真实的入流风剖面不为对数率风剖面时的应用场景。
附图说明
[0050]
为了使本发明的目的、技术方案和有益效果更加清楚,本发明提供如下附图进行说明:
[0051]
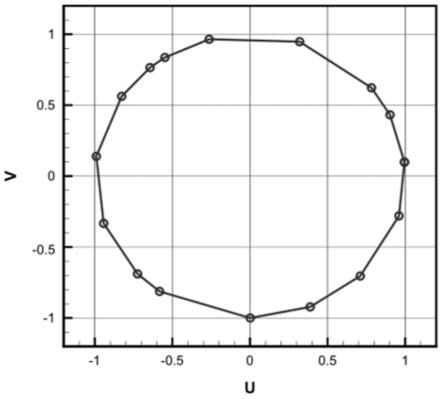
图1为生成的生成初始apg图的示意图。
[0052]
图2为实测风剖面、入流风剖面和计算风剖面之间的关系图。
具体实施方式
[0053]
下面结合附图和具体实施例对本发明作进一步说明,以使本领域的技术人员可以更好的理解本发明并能予以实施,但所举实施例不作为对本发明的限定。
[0054]
本实施例耦合多点测风仪和微尺度稳态模拟的高分辨率山地风场测量方法,包括如下步骤:
[0055]
1)采用单点迭代方法,求解每个风速计的实测数据的入流风向角;
[0056]
具体的,本实施例中,实测数据的入流风向角的求解方法为:
[0057]
(1)生成初始apg图(anemometer phase graph,风速仪相位图),设任一风速计位置处的速度测量值为(u0,v0),经其模||u0||归一化处理后为(u0,v0),在apg图中以p0表示这个点;
[0058]
具体的,本实施例中,生成初始apg图的方法为:
[0059]
①
将对数率入流条件用u
ref
、z
ref
进行无量纲化后有:
[0060][0061]
其中,u
ref
表示参考风速;z
ref
表示参考高度;表示无量纲高度处水平面的纵向无量纲风速;表示无量纲高度处水平面的横向无量纲风速;表示无量纲高度;z
ref
表示参考高度;z0表示地面粗糙长度;
[0062]
②
计算参考高度z
ref
处无量纲化后的入流速度分量:
[0063]
③
数值计算无量纲流场,每个网格节点的无量纲速度向量用表示;
[0064]
④
对无量纲速度向量用进行插值计算,得到风速计位置的无量纲流场
[0065]
⑤
计算的模由于流场的相似性,整个速度场可以被线性缩放以来归一化,有:
[0066][0067][0068][0069]
其中,(ua,va)为apg图中的坐标点,相应的(ub,vb)对应其入流风速,入流风向角为:在步骤
②
中选取多个入流风向角,得到多个坐标点用以生成初始apg图,初始apg图中的每个坐标点的入流风向角均是已知的。在步骤
②
选取的入流风向角均匀覆盖[0
°
,360
°
],本实施例在步骤
②
中选取了16个入流风向角,16个入流风向角均匀覆盖[0
°
,360
°
],即16个入流风向角的角度值分别为0
°
、22.5
°
、45
°
、
……
、337.5
°
。
[0070]
(2)判断apg曲线上是否有至少一个点与点p0之间的距离小于等于设定阈值:若是,则以apg曲线上距离点p0最近的点t0作为点p0的近似,由t0点所对应的入流速度(u
t0
,v
t0
)得到入流风向角以此入流风向角θ0近似为p0点对应的入流风向角;若否,则执行步骤(3)。
[0071]
(3)将点pi投影到距离其最近的apg曲线片段上,投影点记为tm,将该apg曲线片段的两个端点记为t
1m
和t
2m
,则:
[0072][0073]
其中,rm的范围为[0,1],其描述了点tm在apg曲线片段上的相对位置。
[0074]
(4)计算无量纲边界风速大小的分量:
[0075][0076][0077]
其中,和分别表示边界风速在水平面纵向方向和横向方向上的无量纲参数;(u
b1m
,v
b1m
)是apg图上点t
1m
对应的边界速度,(u
b2m
,v
b2m
)是apg图上点t
2m
对应的边界速度。
[0078]
(5)使用计算无量纲流场
[0079]
(6)对无量纲流场进行插值计算得到风速计位置的无量纲速度
[0080]
(7)计算的模并用其对和进行归一化,得到
(u
am
,v
am
)、(u
bm
,v
bm
)。
[0081]
(8)在apg图中插入坐标为(u
am
,v
am
)的点pm,点pm对应的入流速度为(u
bm
,v
bm
);判断点pm和最初的点p0之间距离是否小于等于设定阈值;若是,则停止迭代,执行步骤(9);若否,则m=m+1,以pm代替pi循环执行步骤(3)。
[0082]
(9)根据点pm对应的入流速度(u
bm
,v
bm
),得到入流风向角以入流风向角θm近似为点p0所对应的风向角。
[0083]
2)根据入流风向角,按照对数率风剖面得到入流风速(u
in
,v
in
);
[0084]
3)利用入流风速(u
in
,v
in
)计算得到风场内的速度u(i,j,k),将u(i,j,k)插值得到每个风速计所在位置处的速度(uz,vz);
[0085]
4)采用pi控制法迭代优化,计算误差:
[0086][0087]
其中,e表示误差;n表示迭代次数;z表示风速计所在高度;(u
zref
,)为高度为z的风速计实测风速;判断误差e是否满足收敛条件:若是,则停止迭代,以当前迭代步对应的入流风速(u
in
,v
in
)确定风剖面作为风场的入流条件;若否,则执行步骤5);
[0088]
5)引入pi控制参数:
[0089][0090]
其中,为比例系数;为积分系数,作用为减小因调节作用不够时产生的稳态误差;e(z,j)表示第j次迭代z高度风速计处的误差;
[0091]
得到第n+1次迭代的入流风速:
[0092]
(u
in
,v
in
)
n+1
=λ
pi,t
(z,n)+(u
in
,v
in
)n[0093]
6)令n=n+1,循环执行步骤3)。
[0094]
本实施例耦合多点测风仪和微尺度稳态模拟的高分辨率山地风场测量方法,利用pi控制法迭代优化得到入流风剖面的形状,使实测风速和模拟风速相匹配,特别适用于复杂地形风场中,由于地形效应导致真实的入流风剖面不为对数率风剖面时的应用场景。
[0095]
以上所述实施例仅是为充分说明本发明而所举的较佳的实施例,本发明的保护范围不限于此。本技术领域的技术人员在本发明基础上所作的等同替代或变换,均在本发明的保护范围之内。本发明的保护范围以权利要求书为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1