射频四极加速器束流动力学设计方法
1.本发明涉及一种射频四极加速器束流动力学设计方法。
背景技术:
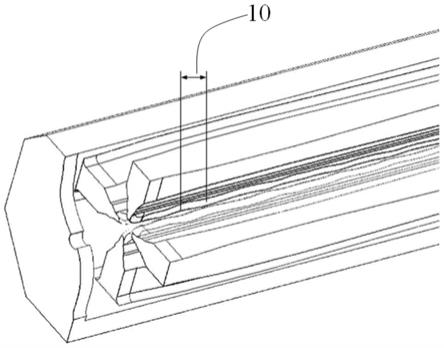
2.射频四极(rfq)加速器能够对低能的质子束或重离子束进行聚束、聚焦和加速,是质子重离子加速器领域常用的低能直线加速器之一,常用于同步加速器的注入器。射频四极加速器的主要工作原理是,利用沿轴线方向调制的四个电极极头,在腔体内部轴线附近产生横向和纵向电场,分别实现对束流的聚焦和加速。图1示出了射频四极加速器的结构示意图,其中,电极极头曲线相邻波峰和波谷之间定义为一个加速单元(cell)。
3.射频四极加速器束流动力学设计的主要目的是根据所需求的束流能量、流强和束流传输效率的要求,确定射频四极加速器中各加速单元的参数,从而确定四个电极极头的几何形状沿纵向位置的变化。束流动力学设计是在射频四极加速器设计过程中最为关键的步骤,它最终决定了射频四极加速器的最重要的三个指标:长度、功率损耗以及束流传输效率。
4.目前国际上现有的射频四极加速器的主流束流动力学设计方法是四段论设计,它将射频四极加速器沿着纵向位置分成了四个不同的功能段进行动力学设计,分别是径向匹配段(rm)、成形段(shaper)、绝热聚束段(gentle buncher)以及加速段(accelerator),这种设计方法由于它的适用范围广泛,目前应用在世界上的绝大多数射频四极加速器中。但是伴随而来的是,这种分段设计方法将rfq分为较少的几段,每一段用同一套方程来设计,因此具有较多的冗余部分,增加了射频四极加速器的长度和功率损耗。为实现射频四极加速器的小型化及低成本,需要对四段论动力学设计方法进行改进,寻找一种更加紧凑、更低功率损耗的射频四极加速器设计方法。
技术实现要素:
5.为解决上述技术问题,本发明提供了一种射频四极加速器的束流动力学设计方法,所述射频四极加速器在径向匹配段和成形段之后包括多个加速单元,其特征在于,该方法包括如下步骤:
6.步骤s1:确定所述射频四极加速器的束流动力学设计的非线性规划模型的决策变量、约束函数和目标函数,其中,所述决策变量互为独立变量且能够共同确定所述射频四极加速器的电极极头形状,其中,所述约束函数根据前一个加速单元束流动力学参数构建,对于第一个加速单元是根据离开所述射频四极加速器的成形段时的束流动力学参数构建,满足所述约束函数的决策变量值就能够保证所确定的电极极头形状的束流动力学稳定、高功率运行稳定、且具有机械加工可行性;
7.步骤s2:获得前一个加速单元的束流动力学参数,所述束流动力学参数包括同步能量w
n-1
和决策变量值,对于第一个加速单元是离开所述射频四极加速器的成形段时的同步能量w0和决策变量值;
8.步骤s3:求解当前加速单元的约束函数得到当前加速单元的决策变量范围;
9.步骤s4:求解目标函数极大值,确定目标函数极大值对应的当前加速单元的决策变量值;
10.步骤s5:根据所确定的决策变量值计算当前加速单元的束流动力学参数;
11.步骤s6:根据当前加速单元束流动力学参数中的同步能量和所确定的决策变量值计算出当前加速单元的出口能量w
out,n
,判断所计算出的出口能量w
out,n
是否已达到所述射频四极加速器的设计要求的出口能量,若否,则以所述下一加速单元作为当前加速单元重复上述步骤s2至本步骤,若是,则结束对于射频四极加速器的束流动力学设计。
12.根据本发明的射频四极加速器的束流动力学设计方法,它不再采用成形段后分为绝热聚束段和加速段两段、对各段分别进行优化设计的方法,而是在成形段之后对所有加速单元采用逐单元优化的方法,通过构建射频四极加速器束流动力学设计的非线性规划数学模型,完成射频四极加速器各加速单元的束流动力学参数求解。这种基于非线性规划数学模型的逐单元优化方法,能够确保实现射频四极加速器的现有绝热聚束段和加速段的功能,但长度更加紧凑,功率损耗更低,因为可以以非线性规划数学模型逐次设计加速单元,直至满足射频四极加速器的设计要求为止。
13.用于从前一个加速单元传递的束流动力学参数包括决策变量和同步能量w
n-1
,或者是决策变量和同步能量w
n-1
的表达式。
14.优选的是,决策变量是每个加速单元中的翼间电压v0、最小孔半径a、电极调制系数m以及同步粒子相位φs,但也可以有其它组合,只要这些决策变量能够共同地唯一确定电极极头机械加工曲线即可。然后,本领域技术人员即可根据决策变量沿各加速单元的变化通过相关程序(如parmteqm)生成电极极头机械加工曲线。
15.优选的是,约束函数是强流稳定性约束、横向孔径约束、纵向相空间稳定区约束、零电流相移约束或峰值表面电场约束。约束函数的约束条件的选取原则是在约束条件确立的决策变量范围内选取任意一组参数都能保证该加速单元的束流动力学稳定、高功率运行稳定、极头机械加工可行的特点。例如,可行的约束条件包括:强流稳定性约束,例如,每周期横纵向相移不能低于零电流相移的40%;横向孔径约束,例如,束流最大包络不能超过最小孔径;纵向相空间稳定区(bucket)约束,例如,束流相宽不能超过相空间稳定区稳定区;零电流相移约束,例如,每周期零电流相移不能超过90
°
;峰值表面电场约束,例如极头表面的最大电场不能超过设计值;结构共振约束,例如每周期纵向零电流相移的一半不超过横向零电流相移;空间电荷共振约束,例如每周期纵向相移不超过横向相移。应当理解,上面列举的这些约束条件中的数值范围可以适当选择为不同的值,以提供更严格或更松弛的约束条件而不背离本发明的精神实质。
16.优选的是,目标函数是长度最优目标函数、功率最优目标函数、或长度和功率具有不同权重因子的长度-功率目标函数。当然,也可以考虑的是以束流传输效率或者束流传输效率与长度、功率的加权组合作为目标函数。因此,目标函数是长度最优目标函数、功率最优目标函数、束流传输效率最优目标函数或长度、功率和束流传输效率具有不同权重因子的长度-功率-束流传输效率目标函数。
17.尽管应当选择一致的目标函数,例如始终以长度最优或功率最优或束流传输效率最优为目标,但是可以为各个加速单元选择相同的决策变量,也可以为它们选择不同的决
策变量;可以为各个加速单元选择相同的约束函数,也可以为它们选择不同的约束函数。例如,对各个加速单元都采用强流稳定性约束,或者对一部分加速单元采用纵向相空间稳定区约束而对另一部分采用零电流相移约束,都可以在设计若干加速单元后实现射频四极加速器的设计要求。
附图说明
18.下面结合附图阐释本发明的实施例。在附图中:
19.图1示出了射频四极加速器的示意图,其中示出了加速单元。
20.图2示出了根据本发明的射频四极加速器的束流动力学设计方法的流程图。
具体实施方式
21.图1示出了射频四极加速器的局部示意图,其中仅示出了一个加速单元10。射频四极加速器由多个这样的加速单元10组成,本发明的射频四极加速器的束流动力学设计方法旨在逐个地确定这些加速单元10的电极极头形状,从而最终确定射频四极加速器的长度、功率损耗以及束流传输效率。
22.根据本发明的射频四极加速器包括未示出的径向匹配段(rm)、成形段、以及若干加速单元。加速单元用于实现原有射频四极加速器的绝热聚束段以及加速段的功能,提供聚束和加速作用,使束流最终达到相应的同步能量并满足长度、功率损耗以及束流传输效率方面的要求。图2示出了根据本发明的射频四极加速器的束流动力学设计方法的流程图。如图2所示,首先读入前一个加速单元的同步能量w
n-1
和决策变量值a
n-1
,m
n-1
,φ
s,n-1
,v
0,n-1
,对于第一个加速单元是离开所述射频四极加速器的成形段时的同步能量w0和决策变量值(步骤s2),然后求解约束函数的约束不等式gi(a,m,φs,v0,w
n-1
,a
n-1
,m
n-1
,φ
s,n-1
,v
0,n-1
)≥0,得到当前加速单元的决策变量范围(步骤s2),其中,a为每个加速单元的最小孔半径、m为电极调制系数、φs为同步粒子相位、v0为每个加速单元中的翼间电压。然后,求解目标函数f(a,m,φs,v0,w
n-1
,,a
n-1
,m
n-1
,φ
s,n-1
,v
0,n-1
)的极大值,确定目标函数极大值对应的当前加速单元的决策变量值an,mn,φ
s,n
,v
0,n
(步骤s3)。接着,根据所确定的决策变量值an,mn,φ
s,n
,v
0,n
计算当前加速单元的同步能量wn、和出口能量w
out,n
(步骤s4)。此时,根据当前加速单元束流动力学参数中的同步能量wn和所确定的决策变量值an,mn,φ
s,n
,v
0,n
计算出当前加速单元的出口能量w
out,n
,判断所计算出的当前加速单元的出口能量w
out,n
是否已达到所述射频四极加速器的设计要求的出口能量(步骤s5),若否,则以下一加速单元作为当前加速单元重复上述步骤s2至本步骤,若是,则结束对于射频四极加速器的束流动力学设计。
23.尽管已经示出和描述了本发明的实施例,但是本领域的普通技术人员可以理解:在不背离本发明的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换、变型以及任意组合,本发明的范围由权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1