一种紧凑型小堆主泵的泵壳水力设计及验证方法与流程
1.本发明涉及非规则形状流道设计技术领域,具体为一种紧凑型小堆主泵的泵壳水力设计及验证方法。
背景技术:
2.大型压水堆核电站中,主泵进、出口通常与其他主设备通过主管道或部分直圆管连接;而cap200采用了紧凑型设计,取消主管道,主泵出口与rpv(压力容器)紧密相连,同时,泵壳与sg(蒸汽发生器)的水室封头集成在一起,水室封头与泵壳采用一体化锻件结构,主泵水力部件直接插入一体化封头结构内,主泵与水室封头内部流场强耦合。
3.由于水室封头与泵壳为一体化结构,叶轮进口流场可能存在较强烈的非稳态特性,从而对主泵的运行产生影响;主要潜在影响包括:叶轮叶片进口流动冲击导致叶轮水力效率下降;叶轮周向流量的不均匀性导致泵在运行中受到流致振动影响;叶轮进口的流场扰动传播至叶轮和导叶内部,引起泵内部压力脉动的上升;这些影响一方面可能会增加泵的能耗,另一方面对主泵运行的安全稳定性产生危害,影响核电系统的可运行性。
技术实现要素:
4.本发明的目的在于提供一种紧凑型小堆主泵的泵壳水力设计及验证方法,以解决上述背景技术中提出的泵的能耗增加等问题。
5.为实现上述目的,本发明提供如下技术方案:
6.一种紧凑型小堆主泵的泵壳水力设计及验证方法,包括步骤:
7.步骤一.初步设计:确定主泵泵壳的原始水力尺寸;
8.步骤二.设计分析与优化:根据主泵泵壳的原始尺寸和主泵的性能参数,设计导流筒、叶轮和导叶水力部件的尺寸;
9.步骤三.试验验证:设计完成后,搭建专用的试验回路,对理论设计进行验证,该试验回路整个采用不锈钢钢管,流体介质为去离子水,试验分为内特性试验和外特性试验。
10.优选的,所述步骤二中设计过程中,对主泵泵壳和导流筒、叶轮和导叶进行耦合设计,耦合设计采用成熟的计算流体技术,对主泵泵壳、导流筒、叶轮和导叶的内流场进行计算分析。
11.优选的,所述计算分析过程为:利用软件工具对导流筒、叶轮和导叶进行建模,并利用软件工具对主泵泵壳进行网格划分,针对叶轮和导叶进行局部加密处理,采用软件工具对主泵泵壳进行数值计算。
12.优选的,计算形成主泵泵壳、导流筒、叶轮和导叶等过流部件的子午面静压分布图和速度矢量图,对过流部件进行多伦多轮迭代优化设计,确保过流部件的子午面上静压分布均匀,无涡流。
13.优选的,所述步骤三内特性试验中:采用piv技术,将壳体做成可视化的结构形式,在待测流场内均匀地散布密度与流体相近的示踪粒子,通过相机捕捉粒子在激光照射下的
图像,经过互相关处理得到流场速度矢量分布图;为了更充分地揭示壳体内部的流场动力学特性,采用双平面piv布局进行测量;使用双路激光器呈垂直角度照射待测量区域,然后分别使用两台相机与激光平面垂直进行粒子图像的拍摄。
14.优选的,piv试验时,将整个试验装置注满水,以保持与实际运行工况相一致;将第一标定板、第二标定板安放在后续激光平面所在位置,记录第一标定板、第二标定板的位置参数;调整相机镜头以及焦距,保证第一标定板、第二标定板充满整个相机画幅并且标定点目视清晰可见。
15.优选的,标定板的作用是复原相机模型的3d空间至2d空间的一一对应关系,建立空间坐标系和图像坐标系的函数映射;采用基于透视投影的投影方程用于标定图像的重建;在直角坐标下,x轴数值为x,y轴数值为y,透视投影表示为;
16.标定板的作用是复原相机模型的3d空间至2d空间的一一对应关系,建立空间坐标系和图像坐标系的函数映射;采用基于透视投影的投影方程用于标定图像的重建,其中,物体平面坐标为(xo,yo),图像坐标为(xi,yi),每个像素在x轴与y轴方向上的物理尺寸为a
11
、a
12
、a
13
、a
21
、a
22
、a
23
、a
31
、a
32
。透视投影表示为:
[0017][0018]
当用标准坐标重写时,可以得到以下两个非线性表达式:
[0019][0020]
为了考虑由于不完整的成像光学,枕形或桶形失真而造成的几何失真,方程式2扩展到更高阶:
[0021][0022]
优选的,采用levenberg-marquart方法首先求解式2中一阶投影方程的未知数,并将其作为求解式3中高阶未知数的初始估计,最终确定映射矩阵的系数;这样就建立了从全局坐标到相机坐标的映射关系,根据这一映射关系,将拍摄到的标定板图像进行重构,以确定映射关系的准确性;这一映射关系将用在后续piv粒子场的重构上;
[0023]
将piv试验得到的矢量分布图与理论设计中的速度矢量图进行对比,形成相关优化项。
[0024]
优选的,所述步骤三外特性试验中,将壳体与主泵样机安装在试验台架上,通过实时采集主泵样机的流量、扬程、转速、轴功率、必须汽蚀余量、振动、噪声外特性参数,最终验证泵壳水力设计的准确性。
[0025]
与现有技术相比,本发明的有益效果是:
[0026]
1、本发明采用cfd技术,对泵壳、导流筒、叶轮、导叶的内流场进行计算分析,形成相关压力分布图和速度矢量图;通过分析泵壳、导流筒、叶轮、导叶等流道内的压力分布及流速变化是否均匀、速度矢量分布是否合理,完成泵壳、叶轮、导叶等主泵水力部件的设计优化;
[0027]
2、通过piv技术对泵壳进出口流道内的瞬态流场进行测量、确定泵壳上下游流场形态,采用数据同化分析技术对泵壳内部流场进行拟合分析、确定泵壳内部流场形态,并根据模型试验结果指导泵壳的水力设计、水室封头一体化结构设计等。
附图说明
[0028]
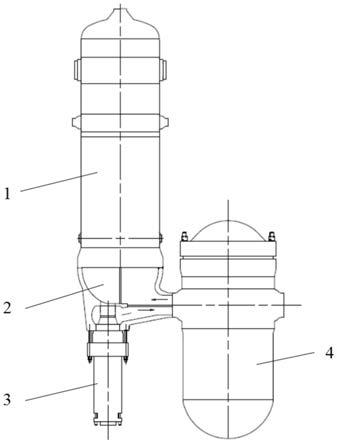
图1为本发明紧凑型小堆结构示意图;
[0029]
图2为本发明水室封头与泵壳一体化结构示意图;
[0030]
图3为本发明泵壳与主泵水力部件耦合示意图;
[0031]
图4为本发明piv测量平面示意图;
[0032]
图5为本发明第一标定板结构示意图;
[0033]
图6为本发明第二标定板结构示意图;
[0034]
图7为本发明紧凑型小堆主泵试验回路图。
[0035]
图中:1、sg蒸汽发生器;2、水室封头;3、主泵体;4、rpv压力容器;5、壳体;6、导流筒;7、叶轮;8、导叶;9、第一标定板;10、第二标定板。
具体实施方式
[0036]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0037]
请参阅图1-7,本发明提供一种技术方案:一种紧凑型小堆主泵的泵壳水力设计及验证方法,其中紧凑型小堆结构包括sg蒸汽发生器1和壳体5,sg蒸汽发生器1的底端安装有水室封头2,且水室封头2的一侧连接有rpv压力容器4,水室封头2的底端安装有壳体5,壳体5的内侧壁安装有导流筒6,壳体5的内部安装有叶轮7,且叶轮7的外侧均匀固定有导叶8,壳体5的内部安装有第一标定板9和第二标定板10,壳体5的底端安装有主泵体3,如图1、图2、图3和图4所示;
[0038]
一种紧凑型小堆主泵的泵壳水力设计及验证方法,包括步骤:
[0039]
步骤一、进行初步设计:根据sg蒸汽发生器1的总体结构和加工、制造工艺水平,经初步计算后,如图2所示,确定壳体5的原始水力尺寸;
[0040]
步骤二、设计分析与优化:根据主泵泵壳5的原始尺寸和主泵3的性能参数,设计导流筒6、叶轮7和导叶8水力部件的尺寸;
[0041]
在设计过程中,应将壳体5和导流筒6、叶轮7、导叶8进行耦合设计,如图3所示;耦合设计采用成熟的cfd技术,对壳体5、导流筒6、叶轮7、导叶8的内流场进行计算分析;首先,运用三维造型软件nx对导流筒6、叶轮7、导叶8过流部件进行建模,并抽取用于流场数值计算的水体模型;采用ansys icem软件对壳体5及主泵水体模型进行网格划分,并针对叶轮7、
导叶8的叶片区域进行局部加密处理;采用ansys fluent软件,对主泵水体模型进行数值计算;数值计算选用分离式求解器和rng k-ε两方程湍流模型,对压力和速度的耦合采用simplec算法,对流项、湍动能与耗散率输运方程的离散采用二阶迎风格式,以减小数值计算的误差,提高计算精度;经计算,最后形成壳体5与导流筒6、叶轮7、导叶8过流部件的子午面静压分布图和速度矢量图;对壳体5和导流筒6、叶轮7、导叶8过流部件经过多轮迭代优化设计,最终确保壳体5与导流筒6、叶轮7、导叶8过流部件的子午面上静压分布均匀,无涡流;同时,壳体5与导流筒6、叶轮7、导叶8过流部件的速度矢量图中,各工况下的速度矢量分布合理,各流量点下液流流态良好,流速变化均匀,不出现可见脱流、回流现象;
[0042]
步骤三、理论设计完成后,通过搭建专用的试验回路,如图7所示,用试验的方法对理论设计进行验证;试验回路采用闭式回路,整个回路采用不锈钢钢管,流体介质为去离子水,其中试验分为内特性试验和外特性试验;
[0043]
内特性试验采用piv技术,将壳体5做成可视化的结构形式,在待测流场内均匀地散布密度与流体相近的示踪粒子,通过相机捕捉粒子在激光照射下的图像,经过互相关处理得到流场速度矢量分布图;为了更充分地揭示壳体5内部的流场动力学特性,采用双平面piv布局进行测量,如图4所示;使用双路激光器呈垂直角度照射待测量区域,然后分别使用两台相机与激光平面垂直进行粒子图像的拍摄;
[0044]
piv试验时,将整个试验装置注满水,以保持与实际运行工况相一致;将第一标定板9、第二标定板10安放在后续激光平面所在位置,记录第一标定板9、第二标定板10的位置参数;调整相机镜头以及焦距,保证第一标定板9、第二标定板10充满整个相机画幅并且标定点目视清晰可见;
[0045]
标定板的作用是复原相机模型的3d空间至2d空间的一一对应关系,建立空间坐标系和图像坐标系的函数映射;采用基于透视投影的投影方程用于标定图像的重建,其中,物体平面坐标为(xo,yo),图像坐标为(xi,yi),每个像素在x轴与y轴方向上的物理尺寸为a
11
、a
12
、a
13
、a
21
、a
22
、a
23
、a
31
、a
32
。透视投影表示为:
[0046][0047]
当用标准坐标重写时,可以得到以下两个非线性表达式:
[0048][0049]
为了考虑由于不完整的成像光学,枕形或桶形失真而造成的几何失真,方程式2扩展到更高阶:
[0050]
[0051]
采用levenberg-marquart方法首先求解式2中一阶投影方程的未知数,并将其作为求解式3中高阶未知数的初始估计,最终确定映射矩阵的系数;这样就建立了从全局坐标到相机坐标的映射关系,根据这一映射关系,将拍摄到的标定板图像进行重构,以确定映射关系的准确性;这一映射关系将用在后续piv粒子场的重构上;
[0052]
将piv试验得到的矢量分布图与理论设计中的速度矢量图进行对比,形成相关优化项;
[0053]
外特性试验中,如图7所示,将壳体5与主泵样机安装在试验台架上,通过实时采集主泵样机的流量、扬程、转速、轴功率、必须汽蚀余量、振动、噪声外特性参数,最终验证泵壳水力设计的准确性。
[0054]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1