基于边缘计算和BP神经网络的环境监测仪器故障预测方法与流程
基于边缘计算和bp神经网络的环境监测仪器故障预测方法
技术领域
1.本发明涉及环境监测技术领域,尤其涉及基于边缘计算和bp神经网络的环境监测仪器故障预测方法。
背景技术:
2.空气质量监测仪器处于生产运行的状态时,某个环节或者部件出现故障,可能会导致整个数据生产链的断裂,从而产生巨大的数据资产损失。空气质量监测仪器的故障预测技术能够提前发现故障,因此,空气质量监测仪器的故障预测具有实际的运维管理意义。
3.面对日新月异的技术变革,新一代信息技术和现代感知技术在环境监测领域应用广度和深度不足,因此应用现代感知技术对空气质量监测仪器的故障预测是十分有必要的。
技术实现要素:
4.本发明所要解决的技术问题在于,提供基于边缘计算和bp神经网络的环境监测仪器故障预测方法。为了解决上述技术问题,本发明提供了基于边缘计算和bp神经网络的环境监测仪器故障预测方法,包括以下步骤:
5.步骤1:数据采集,通过物联传感设备获取监测仪器运行状况的仪器状态数据;
6.步骤2:基于边缘计算数据预处理,整合基础资源后进行抽象,并在边缘侧和云端分别对所述数据进行分析和加工,得到仪器状态数据建模序列和仪器状态数据预测值;
7.步骤3:bp神经网络融合lm算法预测,将所述仪器状态数据建模序列作为bp神经网络融合lm算法的输入训练集,在得到期望误差的bp神经网络后,将所述仪器状态预测值输入到训练好的融合算法,得到预测融合结果;
8.步骤4:设备仪器故障大数据分析验证,生成设备故障知识库并进行分析和验证,得到修正后的预测融合结果和监测仪器故障预测结果。
9.其中,所述步骤1的所述物联传感设备包括钢气瓶压力传感器、水浸探测器、烟雾探测器、断电监测仪。
10.其中,所述步骤1的所述仪器状态数据包括常规污染物的仪器电路各测试点的电压、电流和波形的数据、气路检漏和流量检查的数据、对光学部件和光路进行检查的数据、对计算器进行各项控制功能、通讯工作状态、键入和显示、a/d和d/a转换精度及线性度等进行性能指针检查的数据。
11.其中,所述步骤2具体包括以下步骤:
12.步骤2-1:基础资源整合,所述基础资源包括网络、计算和存储三个基础模块和虚拟化服务;
13.步骤2-2:从传感器中读取环境信息,随后向执行器中写入由环境变化引起的响应操作;
14.步骤2-3:通过虚拟实体表征控制系统中的传感器、执行器、同级控制器和系统,并
描述他们之间的关系;
15.步骤2-4:在所述云端和所述边缘侧计算分析。
16.其中,所述步骤2-4的所述边缘侧对所述仪器状态数据分析、整理、计算和编辑,所述云端对所述边缘侧传递来的数据进行建模分析,得到仪器状态数据建模序列和仪器状态数据预测值。
17.其中,所述步骤3具体包括以下步骤:
18.步骤3-1:将所述仪器状态数据建模序列作为所述bp神经网络融合lm算法的输入训练集,得到期望误差的bp神经网络;
19.步骤3-2:将所述仪器状态数据预测值输入到训练好的所述bp神经网络融合lm算法,得到基于传感器多特征预测值的特征层的环境监测仪器预测融合结果。
20.其中,所述步骤3-1中所述bp神经网络融合lm算法函数为:
[0021][0022]
其中,t为仪器状态数据,z^()为拟合的测量值,α与β分别为比例参数和形状参数,是双参数威布尔分布的故障率函数,参数k用于将拟合的测量值缩放到任何范围,参数y用于指示形状参数在合理区间时的值。
[0023]
其中,所述步骤4包括以下步骤:
[0024]
步骤4-1:将设备故障维修数据、设备校准数据、运维痕迹数据、设备告警数据和设备监测数据作为验证数据构建验证集;
[0025]
步骤4-2:将所述验证集和所述预测融合结果形成设备故障案例知识库;
[0026]
步骤4-3:对所述bp神经网络融合lm算法进行训练,并选择训练均方误差最小的新神经网络,得到修正后的预测融合结果和监测仪器故障预测结果。
[0027]
实施本发明,具有如下有益效果:
[0028]
物联传感设备对环境监测仪器获取监测仪器状态数据,采用基于边缘计算的数据处理融合bp神经网络模型算法多次训练,并选择训练均方误差最小的神经网络,结合设备故障知识库进行预测验证,精准获悉设备故障情况,进一步提高分析效率和故障预测准确率,在监测领域方面提高运维工作的质量和管理效率,保障监测数据真实、准确、全面。可提前预知设备环境状态出现不良的问题,运维人员可及时获取预测预警信息,对设备进行预防性维修,使监测设备能长期连续可靠运行和较高的数据获取率,减少仪器设备发生故障的频次,延长使用寿命,提升运维针对性。
附图说明
[0029]
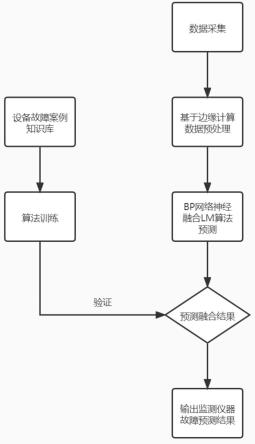
图1是本发明的方法流程图;
[0030]
图2是本发明bp神经网络模型结构示意图;
[0031]
图3是本发明光传感器数据的实验预测结果;
[0032]
图4是本发明光电培增管数据的实验预测结果。
具体实施方式
[0033]
为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作进一步地详细描述。
[0034]
如图1所示,基于边缘计算和bp神经网络的环境监测仪器故障预测方法,包括以下步骤:
[0035]
步骤1:数据采集,通过物联传感设备获取监测仪器运行状况的仪器状态数据;其中,物联传感设备包括钢气瓶压力传感器、水浸探测器、烟雾探测器、断电监测仪,仪器状态数据包括常规污染物的仪器电路各测试点的电压、电流和波形的数据、气路检漏和流量检查的数据、对光学部件和光路进行检查的数据、对计算器进行各项控制功能、通讯工作状态、键入和显示、a/d和d/a转换精度及线性度等进行性能指针检查的数据。
[0036]
步骤2:基于边缘计算数据预处理,具体包括以下步骤:
[0037]
步骤2-1:基础资源整合,包括网络、计算和存储三个基础模块和虚拟化服务;网络模块是将sdn应用于边缘计算,计算模块则是异构计算hc作为边缘侧计算硬件架构,存储模块是时序数据库tsdb作为存放时序数据的数据库,将身份溯源id、传感器(采集)、线性变换(滤波)、节点注册、传输(modbus和mqtt)、配置、远程控制、远程升级,按topic定义能力实现基础资源的标准化管理。
[0038]
步骤2-2:从传感器中读取环境信息,随后向执行器中写入由环境变化引起的响应操作;两者的物理实现由一组专用硬件、固件、设备驱动程序和api接口组成。
[0039]
步骤2-3:通过虚拟实体表征控制系统中的传感器、执行器、同级控制器和系统,并描述他们之间的关系,包含系统元素之间消息传递过程中消息的语义,使用桥模式实现集群,横向划分topic,实现更精准的qos,保障控制流的实时性。
[0040]
步骤2-4:在云端和边缘侧计算分析,边缘侧对仪器状态数据分析、整理、计算和编辑,云端对边缘侧传递来的数据进行建模分析,得到仪器状态数据建模序列和仪器状态数据预测值。一方面将物联传感设备采集的数据进行预处理,对无用的数据进行过滤,降低传输的带宽,另一方面将时间敏感型数据分析应用移至边缘侧,保证数据中心可靠性,满足生成速度的需求。
[0041]
如图2所示,步骤3:bp神经网络融合lm算法预测,具体包括以下步骤:
[0042]
步骤3-1:将仪器状态数据建模序列作为bp神经网络融合lm算法的输入训练集,得到期望误差的bp神经网络;
[0043]
bp神经网络融合lm算法函数为:
[0044][0045]
其中,t为仪器状态数据,z^()为拟合的测量值,α与β分别为比例参数和形状参数,是双参数威布尔分布的故障率函数,参数k用于将拟合的测量值缩放到任何范围,参数y用于指示形状参数在合理区间时的值。
[0046]
步骤3-2:将现有仪器状态数据预测值输入到训练好的bp神经网络融合lm算法中,得到基于传感器多特征预测值的特征层的环境监测仪器局部预测融合结果。
[0047]
如图3和4所示,步骤4:设备仪器故障大数据分析验证,生成设备故障知识库并进行分析和验证;具体包括以下步骤:
[0048]
步骤4-1:将历史设备故障维修数据、设备校准数据、运维痕迹数据、设备告警数据和设备监测数据作为验证数据构建验证集;
[0049]
步骤4-2:将验证集和预测融合结果形成设备故障案例知识库;
[0050]
步骤4-3:对bp神经网络融合lm算法进行训练,并选择训练均方误差最小的新神经网络,得到修正后的预测融合结果和监测仪器故障预测结果。利用基于设备故障案例知识库的数据来修改bp神经网络融合lm算法训练过程中的可训练权重,并且验证过程可以帮助避免过度拟合网络,在训练过程中使用这种验证集可以产生更准确、更稳健的预测。
[0051]
以上所揭露的仅为本发明一种较佳实施例而已,当然不能以此来限定本发明之权利范围,因此依本发明权利要求所作的等同变化,仍属本发明所涵盖的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1