一种基于云模型应变推理的临时看台荷载识别方法
1.本发明属于荷载识别领域,尤其涉及一种基于云模型应变推理的临时看台荷载识别方法。
背景技术:
2.临时看台具有便捷的可拆装性,已被广泛地应用于文艺体育活动中。临时看台是一种以杆系结构为主通过节点装配而组成的支撑体系,通过节点的装配使临时看台具有安装方便的优点,但会削弱结构的整体刚度,杆件在较重的人群等外荷载作用下可能会造成倒塌等严重事故,故有必要进行临时看台支撑结构的荷载识别研究。
3.荷载识别对于临时看台等空间杆系结构的健康监测与日常维护、安全评定等方面具有重要的理论意义和应用价值。许多学者对结构的荷载识别进行了研究,焦鹏飞建立了结构单元应变与结点荷载之间的关系方程组,然后利用tikhonov正则化方法求解该病态方程组,获得荷载数据,但是正则化参数的选取直接影响所求得的解是否收敛。张青霞等采用了结构状态方程方法进行了结构参数和荷载的识别,主要由测得的结构动态响应和构造的系统矩阵计算相应的未知荷载。范玉川等采用newmark-β数值仿真方法,利用了结构动力响应对于单自由度非线性体系进行了荷载识别,该方法对于单自由度体系的荷载识别效果较好,难于应用于复杂体系。张肖雄等基于扩展卡尔曼滤波的观测方程进行了结构参数识别,并结合最小二乘估计进行了外激励荷载识别。陈震等提出了采用截断广义奇异值分解法(tgsvd)识别桥梁移动荷载,其实质是解决移动荷载识别系统矩阵的病态问题。以上方法难于应用于噪声干扰下的三维复杂结构。
4.临时看台支撑结构是一种较为复杂的三维结构,可以通过建立三维有限元模型进行受力分析。pavic等提出3自由度计算模型,并通过有限元建模和现场实测确定了模型的合理性。何林等针对临时看台承受人群荷载对应的结构节点和框架受力性能,通过有限元结合试验进行了系统的研究。故进行看台荷载识别可以通过建立三维有限元模型,将人群荷载、看台座板荷载简化为节点力作用在看台支撑的节点上,通过看台支撑模型上的节点力来实现荷载识别。在许多工程实际中,由于荷载本身的不确定性以及传感器数量的有限性,往往难以实时获取所有的激励响应,而且由于测量噪声的干扰和结构刚度质量矩阵难于精确获取,传统的利用关系方程或状态方程求解荷载的方法,难于进行实际较复杂结构的荷载识别。因此,为了更准确地反映较复杂结构承受荷载的真实状态,有必要引入具有可靠性的不确定分析方法。
5.综上所述,现有的荷载识别技术存在两种缺陷:
6.(1)在现实的荷载识别中,大多是基于结构参数和荷载的关系方程或状态方程方法进行识别,由于该类方程往往是病态方程,难于进行测量噪声干扰下的看台等三维结构的荷载识别。
7.(2)由于实际测量中的传感器数目往往是有限的,而基于有限测点数据的荷载识别结果容易失真。
8.故本文采用应变分析和云模型推理方法相结合,提出了一种基于云模型应变推理的临时看台荷载识别技术,以进行临时看台的荷载识别。
技术实现要素:
9.本发明目的在于提供一种基于云模型应变推理的临时看台荷载识别方法,提出一种在测量噪声干扰下基于有限测点应变数据的临时看台荷载识别方法,用以解决有限测点条件下或受测量噪声干扰的临时看台荷载识别问题。
10.为解决上述技术问题,本发明的一种基于云模型和应变数据的云推理荷载识别方法的具体技术方案如下:
11.一种基于云模型应变推理的临时看台荷载识别方法,具有以下步骤:
12.步骤1:设立荷载模式界限值集合{f1...fi...f
q+1
},其中,fi为第i个荷载模式界限值,根据荷载模式界限值集合划分出q个荷载程度区间,其中,第i个荷载程度区间表示为:[fi,f
i+1
],i∈{1,2,
……
,q};每个荷载程度区间对应一种荷载模式;
[0013]
步骤2:基于设立的q个荷载程度区间,利用荷载模式的界限值计算所有荷载模式对应的均值、熵以及超熵等三个特征值,从而建立云推理后件云规则库,其中,第i种荷载模式对应的三个特征值为均值c
fi
、熵en
fi
以及超熵hef;
[0014]
步骤3:建立结构有限元模型,根据步骤2所述的q个荷载模式界限值得出对应的q个应变模式界限值,并计算所有应变模式对应的均值、熵以及超熵等三个特征值,从而建立云推理前件云规则库,其中,第i种应变模式区间的三个特征值为均值c
εi
、熵en
εi
和超熵he
ε
;
[0015]
步骤4:测量临时看台各个节点的应变数据,采用一维云模型单规则推理算法,通过前件云发生器生成对应于各个节点的云滴的确定度μr;
[0016]
步骤5:通过后件云发生器,生成云滴的荷载生成值fr,从而构成与临时看台各个节点对应的完整云滴(fr,μr);
[0017]
步骤6:进行q种模式下云滴的确定度权化计算,每个荷载作用位置均可以计算出确定度权化生成值;
[0018]
步骤7:通过均化过程将云滴数据转化为荷载信息,从而获得临时看台荷载值;
[0019]
步骤8:多次重复执行步骤4至步骤7,生成多次临时看台荷载值并求取平均值,作为临时看台荷载的输出结果。
[0020]
上述基于云模型应变推理的临时看台荷载识别方法中,作为优选,所述步骤4中,在前件云发生器中生成以应变en
εi
为期望值、he
ε
为标准差的正态随机数en
′i,将测量的临时看台各个节点的应变数据输入前件云发生器中,根据云滴确定度公式,重复使用前件云发生器得到与各个节点对应q个云滴确定度μr。
[0021]
上述基于云模型应变推理的临时看台荷载识别方法中,作为优选,所述步骤5中,在后件云发生器中生成以荷载云en
fi
为期望值、hef为标准差的正态随机数en
″i,再根据步骤4中已获取的与临时看台各个节点对应的云滴确定度μr,输入后件云发生器中,获得与临时看台各个节点对应的q个荷载数值fr,从而形成与临时看台各个节点对应的云滴(fr,μr)。
[0022]
上述基于云模型应变推理的临时看台荷载识别方法中,作为优选,所述步骤6中,根据以下所示的q种模式下云滴的确定度权化计算公式,生成第j个节点位置荷载值:
[0023][0024]
其中,j表示临时看台节点中的任意一个节点,i表示q种模式中的任意一种,i∈{1,2,
……
,q}。
[0025]
上述基于云模型应变推理的临时看台荷载识别方法中,作为优选,所述步骤7中,采用均化公式将步骤6所得的各个节点荷载值fj均化处理,如果经过m次测量,且每次生成n个云滴,则第j个节点位置的荷载值为:
[0026][0027]
其中,m表示测量的总次数,n表示预设的云滴总数,j表示临时看台节点中的任意一个节点,fj表示单次测量中第j个节点位置的荷载值,k∈{1,2,
……
,m},l∈{1,2,
……
,n},表示经过m次测量均化得到的荷载平均值。
[0028]
上述基于云模型应变推理的临时看台荷载识别方法中,作为优选,所述步骤2中,第i种荷载模式区间的均值c
fi
、熵en
fi
以及超熵hef采用如下公式进行计算:
[0029][0030]
式中,fi为第i个荷载模式界限值,r是模糊离散度;
[0031]
上述基于云模型应变推理的临时看台荷载识别方法中,作为优选,所述步骤3中,第i种应变模式区间的均值初始值c
εi
、熵初始值en
εi
和超熵初始值he
ε
采用如下公式进行计算:
[0032][0033]
式中,εi表示第i个应变模式界限值,r是模糊离散度。
[0034]
上述基于云模型应变推理的临时看台荷载识别方法中,作为优选,所述步骤4中,云滴确定度μr的计算公式为:
[0035][0036]
式中,εj表示临时看台第j个节点单次测量的应变数据,c
εi
是第i个应变模式对应的均值,en
′i是以熵en
εi
为期望值、超熵he
ε
为标准差的正态随机数。
[0037]
上述基于云模型应变推理的临时看台荷载识别方法中,作为优选,所述步骤5中,云滴的荷载生成值fr的计算公式为:
[0038][0039]
式中,c
fi
表示第i个荷载模式对应的均值,μr是由前件云发生器生成的云滴确定度,en
″i是以熵en
fi
为期望值、超熵hef为标准差的正态随机数。
[0040]
与现有技术相比,本发明具有如下有益效果:
[0041]
(1)本发明基于云模型应变推理的临时看台荷载识别方法,仅利用了有限数目杆
件的应变测量数据进行荷载识别,解决了难以获取所有杆件测量应变的问题。
[0042]
(2)本发明基于云模型应变推理的临时看台荷载识别方法,其识别效果具有较好的抗噪性能,在测量噪声干扰下,不仅可以识别荷载作用的位置,而且可以识别出荷载的大小,且具有较高的识别精度和抗噪声干扰能力。
附图说明
[0043]
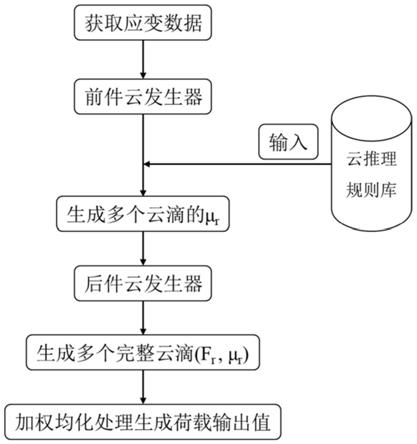
图1为本发明基于云模型应变推理的荷载识别流程图;
[0044]
图2为本发明实施例1三榀临时看台支撑结构模型;
[0045]
图3为本发明实施例1临时看台支撑结构的侧面尺寸图;
[0046]
图4为本发明实施例1临时看台支撑结构座位区域的俯视分区及顶部节点编号示意图;
[0047]
图5为本发明实施例1测量误差2%时工况1-4的荷载识别值与真实值对比图;
[0048]
图6为本发明实施例1测量误差2%时工况5-8的荷载识别值与真实值对比图。
具体实施方式
[0049]
为了更好地了解本发明的目的、结构及功能,下面结合附图,对本发明一种基于云模型应变推理的临时看台荷载识别方法做进一步详细的描述。
[0050]
首先,临时看台支撑结构应变数据与荷载具有相关性,临时看台支撑结构一般是杆系结构,可以将其简化为空间桁架结构,假设该结构的刚度矩阵为[k],荷载向量为{f},位移向量为{v},则荷载向量和位移向量的关系如公式(1)所示:
[0051]
{f}=[k]{v}
ꢀꢀꢀ
(1)
[0052]
假设结构杆系单元e的应变表示为ε(e),则可通过单元两端的轴向位移可获取应变数据,关系式如公式(2)所示:
[0053][0054]
式中,[z]
(e)
是转换矩阵,是将整体位移向量转换为单元e位移向量的矩阵,由具体结构形式确定,{v}是整体位移向量,而[z]
(e)
{v}的乘积结果是向量{v
ix v
iy v
iz v
jx v
jy v
jz
}
t
。
[0055]
如果结构单元数为n,而已知其中p个单元的应变,则相关的应变向量关系式如公式(3)所示:
[0056][0057]
再利用公式(1),可得桁架结构多个单元的应变列阵{ε}与结构的节点荷载{f}之间的关系式如公式(4)所示:
[0058]
{ε}=[l][k]-1
{f}
ꢀꢀꢀ
(4)
[0059]
以上是空间桁架结构杆件单元应变与节点荷载之间的关系,通过这个公式可以直
接由应变数据反演出节点荷载,反映了应变测量数据和荷载具有较强关联关系。由于该方程往往是病态方程,实际测量中往往只能采集有限数目杆件的应变数据,如果仅利用有限数目杆件的应变进行反演荷载识别的效果往往较差或失真,因此本发明主要是利用测量的应变数据和云模型推理技术相结合来进行临时看台结构的荷载识别研究,利用结构的有限元模型或实验模型来建立荷载和应变之间对应的后件云和前件云规则库,从而形成对应的云推理规则库,用实际测量或实验模型模拟等方式采集待检状态下的应变数据,并利用前件云发生器和规则库生成多个云滴的确定度,再利用云推理关系和后件云发生器生成多个云滴对应的荷载值,形成完整的云滴数值(fr,μr),最后对生成的云滴进行加权均化处理产生最后的荷载输出值,并利用该输出值直接识别出荷载的位置和程度,本发明可以更可靠和准确地识别出临时看台支撑结构的节点荷载。
[0060]
下面对本发明的技术方案进一步详细说明。
[0061]
如图1所示,一种基于云模型应变推理的临时看台荷载识别方法,其特征在于,具有以下步骤:
[0062]
步骤1:设立荷载模式界限值集合{f1...fi...f
q+1
},其中,fi为第i个荷载模式界限值,根据荷载模式界限值集合划分出q个荷载程度区间,其中,第i个荷载程度区间表示为:[fi,f
i+1
],i∈{1,2,
……
,q};每个荷载程度区间对应一种荷载模式。
[0063]
步骤2:基于设立的q个荷载程度区间,利用荷载模式的界限值按照公式(5)、(6)、(7)计算所有荷载模式对应的均值、熵以及超熵等三个特征值,从而建立云推理后件云规则库,其中,第i种荷载模式对应的三个特征值为均值c
fi
、熵en
fi
以及超熵hef,公式(5)、(6)、(7)如下所示;
[0064][0065][0066][0067]
式中,fi为第i个荷载模式界限值,r是模糊离散度。
[0068]
步骤3:建立结构有限元模型,根据步骤2所述的q个荷载模式界限值得出对应的q个应变模式界限值,并按照公式(8)、(9)、(10)计算所有应变模式对应的均值、熵以及超熵等三个特征值,从而建立云推理前件云规则库,其中,第i种应变模式区间的三个特征值为均值c
εi
、熵en
εi
和超熵he
ε
,公式(8)、(9)、(10)如下所示:
[0069][0070][0071][0072]
式中,εi表示第i个应变模式界限值,r是模糊离散度。
[0073]
步骤4:测量临时看台各个节点的应变数据,采用一维云模型单规则推理算法,通
过前件云发生器生成对应于各个节点的云滴的确定度μr;
[0074]
具体为,首先在前件云发生器中生成以应变en
εi
为期望值、he
ε
为标准差的正态随机数en
′i,然后将测量的临时看台各个节点的应变数据输入前件云发生器中,根据云滴确定度公式,重复使用前件云发生器得到与各个节点对应q个云滴确定度μr,云滴确定度μr的计算公式(11)为:
[0075][0076]
式中,εj表示临时看台第j个节点单次测量的应变数据,c
εi
是第i个应变模式对应的均值,en
′i是以熵en
εi
为期望值、超熵he
ε
为标准差的正态随机数。
[0077]
步骤5:通过后件云发生器,生成云滴的荷载生成值fr,从而构成与临时看台各个节点对应的完整云滴(fr,μr);
[0078]
具体为,首先在后件云发生器中生成以荷载云en
fi
为期望值、hef为标准差的正态随机数en
″i,再根据步骤4中已获取的与临时看台各个节点对应的云滴确定度μr,输入后件云发生器中,获得与临时看台各个节点对应的q个荷载数值fr,从而形成与临时看台各个节点对应的云滴(fr,μr)。
[0079]
其中,云滴的荷载生成值fr的计算公式(12)为:
[0080][0081]
式中,c
fi
表示第i个荷载模式对应的均值,μr是由前件云发生器生成的云滴确定度,en
″i是以熵en
fi
为期望值、超熵hef为标准差的正态随机数。
[0082]
步骤6:进行q种模式下云滴的确定度权化计算,每个荷载作用位置均可以计算出确定度权化生成值;
[0083]
具体为根据以下所示的q种模式下云滴的确定度权化计算公式(13),生成第j个节点位置荷载值:
[0084][0085]
其中,j表示临时看台节点中的任意一个节点,i表示q种模式中的任意一种,i∈{1,2,
……
,q}。
[0086]
步骤7:通过均化过程将云滴数据转化为荷载信息,从而获得临时看台荷载值;
[0087]
采用均化公式将步骤6所得的各个节点荷载值fj均化处理,如果经过m次测量,且每次生成n个云滴,则第j个节点位置的荷载值的公式(14)如下所示:
[0088][0089]
其中,m表示测量的总次数,n表示预设的云滴总数,j表示临时看台节点中的任意一个节点,fj表示单次测量中第j个节点位置的荷载值,k∈{1,2,
……
,m},l∈{1,2,
……
,n},表示经过m次测量均化得到的荷载平均值。
[0090]
步骤8:多次重复执行步骤4至步骤7,生成多次临时看台荷载值并求取平均值,作
为临时看台荷载的输出结果。
[0091]
另外,步骤4中所述临时看台各个节点的应变数据可以通过实际测量也可以通过模型计算得到;步骤4和步骤5中生成云滴的数量为预设数量。
[0092]
采用本发明基于云模型应变推理的临时看台荷载识别方法可以达到以下技术效果:
[0093]
(1)本发明基于云模型应变推理的临时看台荷载识别方法,仅利用了有限数目杆件的应变测量数据进行荷载识别,解决了难以获取所有杆件测量应变的问题。
[0094]
(2)本发明基于云模型应变推理的临时看台荷载识别方法,其识别效果具有较好的抗噪性能,在测量噪声干扰下,不仅可以识别荷载作用的位置,而且可以识别出荷载的大小,且具有较高的识别精度和抗噪声干扰能力。
[0095]
下面结合实施例1对本发明技术方案做进一步详细说明。
[0096]
实施例1
[0097]
采用三榀临时看台的支撑结构作为研究对象,其支撑结构的简化模型可视为钢桁架结构,节点连接方式为铰接,模型底部节点与地面固接。具体模型详见图2,其中,图2(a)为本实施例三榀临时看台支撑结构模型45度侧的立体视图,图2(b)为本实施例三榀临时看台支撑结构模型的正视图;每一榀看台框架侧面图尺寸如图3所示,各榀之间距离为2m。
[0098]
工况的模拟是将人群荷载以及看台座板荷载以集中力的形式施加在临时看台的支撑架上表面的16个节点处,利用的测量数据是上部节点正下方的16个立杆的应变。临时看台支撑结构座位区域的俯视分区如图4所示,每分区顶部的节点编号也如图所示,节点正下方的立杆编号与节点相同。每个区域的人群荷载以及看台座板荷载均简化为对应节点的荷载,故本研究只需要识别对应节点处的荷载。
[0099]
(1)建立云推理规则库
[0100]
设立荷载模式界限值集合{0kn,1kn,2kn...14kn},根据荷载模式界限值集合划分出14个荷载程度区间,即[0,1]、[1,2]、[2,3]、
……
、[13,14]共14个荷载模式。采用上述公式(5)、公式(6)和公式(7)分别计算出后件云的均值c
fi
、熵en
fi
以及超熵hef。
[0101]
再基于三维看台结构的abaqus有限元模型获取各荷载界限值对应的各单元应变值,从而建立杆节点荷载和杆件单元应变的对应关系,即由对应的14个荷载模式获取对应的14个应变模式,并利用这些应变模式以及公式(8)、公式(9)和公式(10)分别计算出前件云的均值c
εi
、熵en
εi
以及超熵he
ε
。
[0102]
其中前件云14个应变模式对应了后件云14个荷载模式,则认为生成14个推理规则,从而建立了云推理规则库。
[0103]
(2)工况设定
[0104]
采用建立的临时看台支撑结构模型并在节点处施加荷载。荷载作用区域及节点划分如图4所示。荷载工况设置按该区域均匀分布总计8kn的荷载,即以大小为2kn的集中力的形式作用于该区域四个角节点,区域间重复节点处荷载叠加。荷载工况如表1所示,测量的应变数据附加了2%的测量噪声,并仅利用上部节点正下方16个立杆的应变进行荷载识别。
[0105]
表1临时看台模型的荷载工况
[0106]
荷载工况区域作用节点工况1一[1,2,5,6]
工况2二[2,3,6,7]工况3四[5,6,9,10]工况4五[6,7,10,11]工况5一、五[1,2,5,6,7,10,11]工况6四、五、九[5,6,7,9,10,11,12,15,16]工况7三、五、八[3,4,6,7,8,10,11,14,15]工况8所有区域[1~16]
[0107]
(3)荷载识别结果
[0108]
利用以上步骤4-步骤8所述方法,对各个节点的荷载进行识别,其中,工况1-4的荷载识别结果如图5所示,工况5-8的荷载识别结果如图6所示,从图5和图6中可以明显观察到在测量噪声干扰下各工况荷载的定位和定量效果均较好,均可以较好的判断出荷载施加的位置,通过荷载真实值和识别值的图形比较,也可以大致观察到荷载识别的定量计算结果也较好,为了更直观地对识别荷载的大小进行分析,可以利用识别结果的识别准确率进行判断。识别准确率计算公式(27)为:
[0109][0110]
由于工况和节点数量较大,仅展示工况1、5、8,荷载识别准确率如表2所示。
[0111]
表2工况1、5、8荷载识别准确率
[0112][0113]
由图5、图6和表2可以看出,该方法无论是对荷载作用位置还是荷载大小的识别结果都比较准确,具有较高的识别准确率。其中工况8因为要同时识别16个节点的荷载作用值,由于识别位置较多,且具有测量噪声干扰,故第12、13个节点的识别准确率相对较低,但所有16个节点的整体平均识别准确率依然达到89.48%,并且最高识别准确率达到99.94%,故整体具有较高的识别准确率。因此,本发明公开的一种基于云模型应变推理的临时看台荷载识别方法具有较好的荷载识别效果。
[0114]
可以理解,本发明是通过一些实施例进行描述的,本领域技术人员知悉的,在不脱离本发明的精神和范围的情况下,可以对这些特征和实施例进行各种改变或等效替换。另
外,在本发明的教导下,可以对这些特征和实施例进行修改以适应具体的情况及材料而不会脱离本发明的精神和范围。因此,本发明不受此处所公开的具体实施例的限制,所有落入本发明的权利要求范围内的实施例都属于本发明所保护的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1