一种基于人工智能技术的瓷片分拣及复原方法与流程
1.本发明涉及瓷器碎片处理技术领域,特别涉及一种基于人工智能技术的瓷片分拣及复原方法。
背景技术:
2.陶瓷是陶器和瓷器的总称,是以粘土为主要原料以及各种天然矿物经过粉碎混炼、成型和煅烧制得的材料以及各种制品。陶器的发明,是整个人类历史上划时代的标志之一,而且我国陶瓷业有万余年的发展历程,这期间遗留下丰富的陶瓷为文化财产,但是早些年间的陶瓷经过上时间的遗留,在被发现时就是被破坏状态,因此,需要专业人员针对发现的陶瓷碎片分拣出来进行复原,从而实现陶瓷恢复。
3.目前,在陶瓷碎片分拣与复原的现有技术方案中,通常是经过专业人员进行逐一鉴定以及手动复原,这不仅对专业人员要求高,而且对专业人员的精力也消耗大,并且专业人员在进行鉴定时还比较容易出现鉴定错误,同时在进行手动复原时也容易出现操作失误,因此,本发明提出了一种基于人工智能技术的瓷片分拣及复原方法,通过人工智能技术自动化对陶瓷碎片进行分拣与复原,从而有效减轻专业人员的工作量,减少对专业人员的精力消耗,而且还能够提高陶瓷碎片分拣的准确性和复原时的精准性。
技术实现要素:
4.本发明的目的在于提供一种基于人工智能技术的瓷片分拣及复原方法,以解决上述背景技术中提出的问题。
5.为实现上述目的,本发明提供如下技术方案:一种基于人工智能技术的瓷片分拣方法,包括:
6.针对待分拣瓷片进行扫描,获得待分拣瓷片信息;
7.根据所述待分拣瓷片信息对所述待分拣瓷片进行颜色分析判断,获得第一判断结果;
8.根据所述待分拣瓷片信息对所述待分拣瓷片进行轮廓分析判断,获得第二判断结果;
9.根据所述待分拣瓷片信息对所述待分拣瓷片进行弧度分析判断,获得第三判断结果;
10.根据所述待分拣瓷片信息对所述待分拣瓷片进行纹理分析判断,获得第四判断结果;
11.根据所述待分拣瓷片信息对所述待分拣瓷片进行侧边颗粒度分布情况分析判断,获得第五判断结果;
12.综合所述第一判断结果、第二判断结果、第三判断结果、第四判断结果以及第五判断结果确定所述待分拣瓷片的分拣结果,并根据所述待分拣瓷片的分拣结果实现对所述待分拣瓷片的分拣。
13.优选地,所述针对待分拣瓷片进行扫描,包括:
14.将所述待分拣瓷片放置扫描台上;
15.转动所述扫描台,同时通过相机拍摄多张所述待分拣瓷片的图片,在拍摄过程中调整所述相机的高度和角度,获取不同的所述待分拣瓷片的图片;
16.在不同的所述待分拣瓷片的图片中任选一张图片作为基础,按照所述图片的获取顺序进行处理与缝合,得到所述待分拣瓷片的空间立体扫描图像;
17.针对所述待分拣瓷片的空间立体扫描图像进行信息提取得到待分拣瓷片信息。
18.优选地,根据所述待分拣瓷片信息对所述待分拣瓷片进行颜色分析判断,包括:
19.对所述待分拣瓷片进行划分,并获取每个划分区域内的特征点的颜色值;
20.在划分区域中,根据颜色比对标准确定所述划分区域内的特征点的颜色;其中,所述颜色比对标准是按照颜色空间的维度和颜色阶梯将颜色空间划分成的颜色块,每个颜色块具有相应的颜色值范围;
21.根据所述划分区域内的特征点的颜色确定所述划分区域的色调;
22.针对所述划分区域的色调进行综合分析,将每个划分区域的色调结合划分区域的数量确定所述待分拣瓷片的主色调;
23.按照所述待分拣瓷片的主色调进行判断,判断所述待分拣瓷片的色调是否一致,得到第一判断结果。
24.优选地,根据所述待分拣瓷片信息对所述待分拣瓷片进行轮廓分析判断,包括:建立参考坐标系,并将所述待分拣瓷片导入所述参考坐标系,确定所述待分拣瓷片的关键点在所述参考坐标系中的关键点坐标,根据所述关键点坐标针对所述分拣你瓷片进行拟合,得到所述待分拣瓷片的轮廓信息,针对所述待分拣瓷片的轮廓信息进行判断确定第二判断结果。
25.优选地,根据所述待分拣瓷片信息对所述待分拣瓷片进行弧度分析判断时,所述待分拣瓷片的弧度在测量是根据所述待分拣瓷片的轮廓信息确定,在所述待分拣瓷片的轮廓信息中,确定所述待分拣瓷片的曲面对应的起点信息和终点信息,根据所述待分拣瓷片的轮廓信息通过所述关键点坐标针对所述待分拣瓷片进行空间拟合,确定所述分拣瓷片的弧面对应的中心坐标信息,根据所述中心坐标信息结合所述起点信息和终点信息计算所述待分拣瓷片的弧度,针对所述待分拣瓷片的弧度判断是否属于同一陶瓷物品,得到第三判断结果。
26.优选地,根据所述待分拣瓷片信息对所述待分拣瓷片进行纹理分析判断,包括:
27.获取所述待分拣瓷片的表面图像,并针对所述表面图像进行图像预处理,获得优化表面图像;
28.针对所述优化表面图像进行分割,得到多个优化表面图像区域块;
29.在所述优化表面图像区域块中,依次进行二值化处理得到二值化优化表面图像区域块数据;
30.通过形态学分析将所述二值化优化表面图像区域块数据中纹理区域提取出来,并进行信息提取得到所述待分拣瓷片的纹理信息;
31.根据所述待分拣瓷片的纹理信息进行判断得到第四判断结果。
32.优选地,根据所述待分拣瓷片信息对所述待分拣瓷片进行侧边颗粒度分布情况分
析判断时,通过激光粒度仪确定所述待分拣瓷片进行侧边颗粒度分布情况,然后再根据所述待分拣瓷片进行侧边颗粒度分布情况进行判断得到第五判断结果;其中,所述激光粒度仪在确定所述待分拣瓷片进行侧边颗粒度分布情况时,通过所述待分拣瓷片的侧边对光的散射造成的影响确定所述待分拣瓷片的侧边颗粒度分布情况,针对所述待分拣瓷片的侧边进行激光照射,并获取所述待分拣瓷片的侧边在激光照射时的衍射现象,根据所述待分拣瓷片的侧边在激光照射时的衍射现象结合米散射理论分析所述衍射现象中光的散射状况,确定所述待分拣瓷片的侧边中颗粒分布情况,进而所述待分拣瓷片的侧边颗粒度分布情况,并且在获取所述待分拣瓷片的侧边在激光照射时的衍射现象时,从多个不同角度进行获取,并针对获取的多组衍射现象信息进行分析确定所述待分拣瓷片的侧边中颗粒分布情况。
33.优选地,所述第一判断结果、第二判断结果、第三判断结果、第四判断结果以及第五判断结果包括属于同一陶瓷物品和不属于同一陶瓷物品两种情况,在综合所述第一判断结果、第二判断结果、第三判断结果、第四判断结果以及第五判断结果确定所述待分拣瓷片的分拣结果时,包括:
34.分析所述第一判断结果、第二判断结果、第三判断结果、第四判断结果以及第五判断结果的情况,确定所述第一判断结果、第二判断结果、第三判断结果、第四判断结果以及第五判断结果中几个判断结果为属于同一陶瓷物品,几个判断结果为不属于同一陶瓷物品;
35.根据所述第一判断结果、第二判断结果、第三判断结果、第四判断结果以及第五判断结果的情况确定所述待分拣瓷片的分拣结果;当所述第一判断结果、第二判断结果、第三判断结果、第四判断结果以及第五判断结果中所有判断结果均为属于同一陶瓷物品时,所述待分拣瓷片的分拣结果为属于同一陶瓷物品,否则,所述待分拣瓷片的分拣结果为不属于同一陶瓷物品。
36.优选地,根据所述待分拣瓷片的分拣结果实现对所述待分拣瓷片的分拣时,按照所述待分拣瓷片的分拣结果追溯属于同一陶瓷物品的待分拣瓷片,并将追溯到的属于同一陶瓷物品的待分拣瓷片直接分拣到一起。
37.优选地,在实现对所述待分拣瓷片的分拣之后针对属于同一陶瓷物品的瓷片进行复原,所述复原的过程包括:
38.确定属于同一陶瓷物品的待复原瓷片;
39.针对所述待复原瓷片进行标记与扫描,得到标记瓷片图像;
40.采用虚拟vr技术针对所述标记瓷片图像进行模拟复原,构建陶瓷物品的立体复原模型;
41.参照所述陶瓷物品的立体复原模型,逐一根据所述标记瓷片图像按照标记信息将所述待复原瓷片进行复原,得到复原陶瓷。
42.本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
43.下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
附图说明
44.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
45.图1为本发明所述的一种基于人工智能技术的瓷片分拣及复原方法中瓷片分拣方法的步骤示意图;
46.图2为本发明所述的一种基于人工智能技术的瓷片分拣及复原方法中瓷片分拣方法步骤一的示意图;
47.图3为本发明所述的一种基于人工智能技术的瓷片分拣及复原方法中瓷片分拣方法步骤二的步骤示意图;
48.图4为本发明所述的一种基于人工智能技术的瓷片分拣及复原方法中瓷片复原方法的步骤示意图。
具体实施方式
49.以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
50.如图1所示,本发明实施例提供了一种基于人工智能技术的瓷片分拣方法,包括:
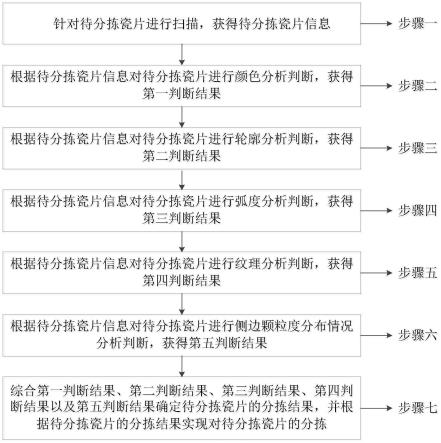
51.步骤一、针对待分拣瓷片进行扫描,获得待分拣瓷片信息;
52.步骤二、根据所述待分拣瓷片信息对所述待分拣瓷片进行颜色分析判断,获得第一判断结果;
53.步骤三、根据所述待分拣瓷片信息对所述待分拣瓷片进行轮廓分析判断,获得第二判断结果;
54.步骤四、根据所述待分拣瓷片信息对所述待分拣瓷片进行弧度分析判断,获得第三判断结果;
55.步骤五、根据所述待分拣瓷片信息对所述待分拣瓷片进行纹理分析判断,获得第四判断结果;
56.步骤六、根据所述待分拣瓷片信息对所述待分拣瓷片进行侧边颗粒度分布情况分析判断,获得第五判断结果;
57.步骤七、综合所述第一判断结果、第二判断结果、第三判断结果、第四判断结果以及第五判断结果确定所述待分拣瓷片的分拣结果,并根据所述待分拣瓷片的分拣结果实现对所述待分拣瓷片的分拣。
58.上述技术方案在对待分拣瓷片进行分拣时,首先,通过扫描待分拣瓷片将待分拣瓷片的待分拣瓷片信息获取到,在待分拣瓷片信息中包括:待分拣瓷片的大小、形状、颜色、轮廓、弧度、纹理、侧边颗粒度分布情况等;接着,根据待分拣瓷片信息依次对待分拣瓷片进行多次分析判断,在分析判断过程中,针对待分拣瓷片的颜色进行分析,判断待分拣瓷片是否属于同一陶瓷物品,从而得到第一判断结果;针对待分拣瓷片的轮廓进行分析,判断待分拣瓷片的是否属于同一陶瓷物品,从而得到第二判断结果;针对待分拣瓷片的弧度进行分析,判断待分拣瓷片的是否属于同一陶瓷物品,从而得到第三判断结果;针对待分拣瓷片的纹理进行分析,判断待分拣瓷片的是否属于同一陶瓷物品,从而得到第四判断结果;针对待分拣瓷片的侧边颗粒度分布情况进行分析,判断待分拣瓷片的是否属于同一陶瓷物品,从
而得到第五判断结果;最后将第一判断结果、第二判断结果、第三判断结果、第四判断结果以及第五判断结果综合在一起得到待分拣瓷片的分拣结果,进而根据待分拣瓷片的分拣结果实现对待分拣瓷片的分拣。
59.上述技术方案通过针对待分拣瓷片进行扫描将待分拣瓷片隐含的详细信息转换成直观的待分拣瓷片信息,不仅能够直观体现待分拣瓷片的情况,而且还方便对待分拣瓷片进行分析判断,进一步还能够提高待分拣瓷片的分拣结果确定效率。通过根据待分拣瓷片信息分别对待分拣瓷片进行颜色分析判断、轮廓分析判断、弧度分析判断、纹理分析判断以及侧边颗粒度分布情况分析判断能够全面对带分拣瓷片进行分析判断,而且在分析判断过程中,通过程序语言调取扫描获得的待分拣瓷片信息直接分析与判断,无需专业人员人为进行辨别就能够自动化实现分析判断,不仅有效减轻专业人员的工作量和精力消耗,而且还能够避免专业人员在辨别时主观辨别带来的判断误差,有效提高了判断结果的准确性,进而提高待分拣瓷片的分拣结果的准确性,同时在针对大量待分拣瓷片进行处理时也能够高效准确得到待分拣瓷片的分拣结果。此外,在确定待分拣瓷片的分拣结果时,综合第一判断结果、第二判断结果、第三判断结果、第四判断结果以及第五判断结果确定,使得待分拣瓷片的分拣结果受到第一判断结果、第二判断结果、第三判断结果、第四判断结果以及第五判断结果的制约,也就是待分拣瓷片在颜色、轮廓、弧度、纹理以及侧边颗粒度分布情况方面都会对待分拣瓷片的分拣结果产生影响,从而使得待分拣瓷片的分拣结果更加准确。
60.如图2所示,本发明提供的一个实施例中,所述针对待分拣瓷片进行扫描,包括:
61.a1、将所述待分拣瓷片放置扫描台上;
62.a2、转动所述扫描台,同时通过相机拍摄多张所述待分拣瓷片的图片,在拍摄过程中调整所述相机的高度和角度,获取不同的所述待分拣瓷片的图片;
63.a3、在不同的所述待分拣瓷片的图片中任选一张图片作为基础,按照所述图片的获取顺序进行处理与缝合,得到所述待分拣瓷片的空间立体扫描图像;
64.a4、针对所述待分拣瓷片的空间立体扫描图像进行信息提取得到待分拣瓷片信息。
65.上述技术方案在获取待分拣瓷片信息时,通过对待分拣瓷片进行扫描获得,其过程包括:将待分拣瓷片放置到扫描台上,然后转动扫描台,同时在扫描台转动过程中通过相机拍摄待分拣瓷片的图像图片,并且在拍摄图片时还针对相机的拍摄高度和角度进行调整,从而获得待分拣瓷片全方位的图片,接着在获得的待分拣瓷片全方位的图片中选择一张作为基础,以作为基础的图片中待分拣瓷片的图像作为基底,结合图片的获取顺序以及拍摄角度进行处理与缝合,从而得到待分拣瓷片的空间立体扫描图像,最后针对待分拣瓷片的空间立体扫描图像按照大小、形状、颜色、轮廓、弧度、纹理、侧边颗粒度分布情况等信息类别依次进行信息提取,从而得到待分拣瓷片信息。
66.上述技术方案通过对待分拣瓷片进行扫描能够将待分拣瓷片转化为电子信息,方便待分拣瓷片信息的获取以及方便进行自动化智能分拣,而且扫描时通过相机拍摄多张不同高度和角度下的图片从而能够全面获得待分拣瓷片的整体信息,从而使得得到待分拣瓷片的空间立体扫描图像能将待分拣瓷片百分百还原,进而提高待分拣瓷片信息的全面性和准确性。
67.如图3所示,本发明提供的一个实施例中,根据所述待分拣瓷片信息对所述待分拣瓷片进行颜色分析判断,包括:
68.b1、对所述待分拣瓷片进行划分,并获取每个划分区域内的特征点的颜色值;
69.b2、在划分区域中,根据颜色比对标准确定所述划分区域内的特征点的颜色;其中,所述颜色比对标准是按照颜色空间的维度和颜色阶梯将颜色空间划分成的颜色块,每个颜色块具有相应的颜色值范围;
70.b3、根据所述划分区域内的特征点的颜色确定所述划分区域的色调;
71.b4、针对所述划分区域的色调进行综合分析,将每个划分区域的色调结合划分区域的数量确定所述待分拣瓷片的主色调;
72.b5、按照所述待分拣瓷片的主色调进行判断,判断所述待分拣瓷片的色调是否一致,得到第一判断结果。
73.上述技术方案在根据待分拣瓷片信息对待分拣瓷片进行颜色分析判断时,首先,对待分拣瓷片进行划分,将待分拣瓷片划分多个划分区域,并在每个划分区域内进行特征点颜色获取,得到每个划分区域内的特征点的颜色值,然后,在划分区域中,将划分区域内的特征点的颜色值通过颜色比对标准进行比较确定划分区域内的特征点的颜色,接着再针对划分区域内所有的特征点以及特征点的颜色进行分析,将特征点的颜色相同较多的颜色作为划分区域的色调,然后再对划分区域的色调进行综合分析,将每个划分区域的色调结合划分区域的数量,把占比较多的色调确定为待分拣瓷片的主色调,最后,根据待分拣瓷片的主色调进行判断,判断待分拣瓷片的色调是否一致,从而得到第一判断结果。其中,颜色比对标准是按照颜色空间的维度和颜色阶梯将颜色空间划分成的颜色块,每个颜色块具有相应的颜色值范围,例如在rgb颜色空间中颜色空间的维度为3时,分别代表红、绿、蓝三种颜色,一般情况下红、绿、蓝三个颜色维度都有256个值,如果颜色阶梯分为8个阶梯的话,则每一颜色块在每一维度拥有256/8=32个颜色值,那么第一个颜色块在这一维度的颜色值为0~31,第二个颜色块在这一维度的颜色值为32~61,第三个颜色块在这一维度的颜色值为62~93,
……
,第三十二个颜色块在这一维度的颜色值为224~255。
74.上述技术方案通过待分拣瓷片的主色调针对待分拣瓷片进行颜色分析判断,从而根据主色调是否一致确定第一判断结果,在这里采用程序语言进行执行实现,不仅高效,能够针对大量数据都能快速得到第一判断结果,而且无需专业人员人为肉眼辨别判断,能够有效去除人为主观误差,提高第一判断结果的准确率,此外,在确定待分拣瓷片的主色调时,先是以划分区域分析,再综合分析确定待分拣瓷片的主色调,能够提高划分区域的色调的权值,提高待分拣瓷片的主色调的综合全局性,使得待分拣瓷片的主色调更加优化。
75.本发明提供的一个实施例中,根据所述待分拣瓷片信息对所述待分拣瓷片进行轮廓分析判断,包括:建立参考坐标系,并将所述待分拣瓷片导入所述参考坐标系,确定所述待分拣瓷片的关键点在所述参考坐标系中的关键点坐标,根据所述关键点坐标针对所述分拣你瓷片进行拟合,得到所述待分拣瓷片的轮廓信息,针对所述待分拣瓷片的轮廓信息进行判断确定第二判断结果。
76.上述技术方案在根据待分拣瓷片信息对待分拣瓷片进行轮廓分析判断,时,首先,建立参考坐标系,并将待分拣瓷片导入参考坐标系,然后,确定待分拣瓷片的关键点在参考坐标系中的关键点坐标,接着,根据关键点坐标针对分拣你瓷片进行拟合,得到待分拣瓷片
的轮廓信息,最后,针对待分拣瓷片的轮廓信息进行判断确定第二判断结果。
77.上述技术方案通过建立参考坐标系使得针对每一片待分拣瓷片都能够得到明确的坐标信息,从而通过坐标信息直观体现待分拣瓷片的轮廓,进而方便对待分拣瓷片的轮廓信息进行判断,为确定第二判断结果提供便捷。
78.本发明提供的一个实施例中,根据所述待分拣瓷片信息对所述待分拣瓷片进行弧度分析判断时,所述待分拣瓷片的弧度在测量是根据所述待分拣瓷片的轮廓信息确定,在所述待分拣瓷片的轮廓信息中,确定所述待分拣瓷片的曲面对应的起点信息和终点信息,根据所述待分拣瓷片的轮廓信息通过所述关键点坐标针对所述待分拣瓷片进行空间拟合,确定所述分拣瓷片的弧面对应的中心坐标信息,根据所述中心坐标信息结合所述起点信息和终点信息计算所述待分拣瓷片的弧度,针对所述待分拣瓷片的弧度判断是否属于同一陶瓷物品,得到第三判断结果。
79.上述技术方案在根据待分拣瓷片信息对待分拣瓷片进行弧度分析判断时,待分拣瓷片的弧度在测量是根据待分拣瓷片的轮廓信息确定,在待分拣瓷片的轮廓信息中,先是确定待分拣瓷片的曲面对应的起点信息和终点信息,再根据待分拣瓷片的轮廓信息通过关键点坐标针对待分拣瓷片进行空间拟合,确定分拣瓷片的弧面对应的中心坐标信息,接着,根据中心坐标信息结合起点信息和终点信息计算待分拣瓷片的弧度,最后,针对待分拣瓷片的弧度判断是否属于同一陶瓷物品,得到第三判断结果。
80.其中,在确定分拣瓷片的弧面对应的中心坐标信息时,包括:
81.在待分拣瓷片轮廓上任取两个不相同的点(x1,y1)和(x2,y2);
82.根据下述公式确定待分拣瓷片的弧面对应的中心坐标信息:
[0083][0084]
n=y1+(1
÷f′
(x1))(m-x1)
[0085]
上述公式中,m表示待分拣瓷片的弧面对应的中心坐标信息的横坐标,n表示待分拣瓷片的弧面对应的中心坐标信息的纵坐标,f
′
(x1)表示待分拣瓷片进行空间拟合函数在(x1,y1)点处的导数,f
′
(x2)表示待分拣瓷片进行空间拟合函数在(x2,y2)点处的导数。
[0086]
其中,在当待分拣瓷片进行空间拟合函数为时,待分拣瓷片进行空间拟合函数的导数为f
′
(x1)即为x=x1时待分拣瓷片进行空间拟合函数在(x1,y1)点处的导数,)点处的导数,同理,f
′
(x2)即为x=x2时待分拣瓷片进行空间拟合函数在(x2,y2)点处的导数,
[0087]
上述技术方案能够通过待分拣瓷片的轮廓信息能够通过空间拟合准确确定待分拣瓷片的弧面对应的中心坐标信息,进而实现待分拣瓷片的弧度计算,在计算待分拣瓷片的弧度过程中,按照待分拣瓷片在参考坐标系中的坐标数据进行确定与计算,不仅方便,而
且还直观准确,并且都是针对客观数据进行运算的,有效降低了计算待分拣瓷片的弧度过程的复杂程度和出错概率,进而提高了第三判断结果的准确性。
[0088]
本发明提供的一个实施例中,根据所述待分拣瓷片信息对所述待分拣瓷片进行纹理分析判断,包括:
[0089]
获取所述待分拣瓷片的表面图像,并针对所述表面图像进行图像预处理,获得优化表面图像;
[0090]
针对所述优化表面图像进行分割,得到多个优化表面图像区域块;
[0091]
在所述优化表面图像区域块中,依次进行二值化处理得到二值化优化表面图像区域块数据;
[0092]
通过形态学分析将所述二值化优化表面图像区域块数据中纹理区域提取出来,并进行信息提取得到所述待分拣瓷片的纹理信息;
[0093]
根据所述待分拣瓷片的纹理信息进行判断得到第四判断结果。
[0094]
上述技术方案在根据待分拣瓷片信息对待分拣瓷片进行纹理分析判断时,首先,获取待分拣瓷片的表面图像,并对表面图像进行图像预处理,在图像预处理时,通过灰度化、图像增强等处理获得优化表面图像;然后,针对优化表面图像进行分割,将优化表面图像分成小区域块,从而得到多个优化表面图像区域块;接着,在优化表面图像区域块中,依次进行二值化处理得到二值化优化表面图像区域块数据;然后再通过形态学分析将二值化优化表面图像区域块数据中纹理区域提取出来,并进行信息提取得到待分拣瓷片的纹理信息;最后根据待分拣瓷片的纹理信息进行判断得到第四判断结果。
[0095]
上述技术方案通过图像预处理能够消除待分拣瓷片的表面图像中无关的信息,恢复有用的真实信息,增强有关信息的可检测性、最大限度地简化数据,同时还能够提高待分拣瓷片的表面图像优化表面图像进行分割和待分拣瓷片的纹理信息提取的可靠性,从而提高第四判断结果的准确性。
[0096]
本发明提供的一个实施例中,根据所述待分拣瓷片信息对所述待分拣瓷片进行侧边颗粒度分布情况分析判断时,通过激光粒度仪确定所述待分拣瓷片进行侧边颗粒度分布情况,然后再根据所述待分拣瓷片进行侧边颗粒度分布情况进行判断得到第五判断结果;其中,所述激光粒度仪在确定所述待分拣瓷片进行侧边颗粒度分布情况时,通过所述待分拣瓷片的侧边对光的散射造成的影响确定所述待分拣瓷片的侧边颗粒度分布情况,针对所述待分拣瓷片的侧边进行激光照射,并获取所述待分拣瓷片的侧边在激光照射时的衍射现象,根据所述待分拣瓷片的侧边在激光照射时的衍射现象结合米散射理论分析所述衍射现象中光的散射状况,确定所述待分拣瓷片的侧边中颗粒分布情况,进而所述待分拣瓷片的侧边颗粒度分布情况,并且在获取所述待分拣瓷片的侧边在激光照射时的衍射现象时,从多个不同角度进行获取,并针对获取的多组衍射现象信息进行分析确定所述待分拣瓷片的侧边中颗粒分布情况。
[0097]
上述技术方案根据待分拣瓷片信息对待分拣瓷片进行侧边颗粒度分布情况分析判断时,激光粒度仪建立在米氏理论上,利用颗粒对光的散射(衍射)现象测试颗粒大小从而确定待分拣瓷片进行侧边颗粒度分布情况,然后再根据待分拣瓷片进行侧边颗粒度分布情况进行判断得到第五判断结果;其中,激光粒度仪在确定待分拣瓷片进行侧边颗粒度分布情况时,通过待分拣瓷片的侧边对光的散射造成的影响确定待分拣瓷片的侧边颗粒度分
布情况,包括:针对待分拣瓷片的侧边进行激光照射,并获取待分拣瓷片的侧边在激光照射时的衍射现象,根据待分拣瓷片的侧边在激光照射时的衍射现象结合米散射理论分析衍射现象中光的散射状况,确定待分拣瓷片的侧边中颗粒分布情况,进而待分拣瓷片的侧边颗粒度分布情况,并且在获取待分拣瓷片的侧边在激光照射时的衍射现象时,从多个不同角度进行获取,并针对获取的多组衍射现象信息进行分析确定待分拣瓷片的侧边中颗粒分布情况,在待分拣瓷片的侧边颗粒度分布情况中包括粒度分布表、粒度分布曲线、平均粒径等。
[0098]
上述技术方案通过激光粒度仪确定待分拣瓷片进行侧边颗粒度分布情况不仅能够得到待分拣瓷片的侧边粒度分布数据,而且通过激光粒度仪确定待分拣瓷片进行侧边颗粒度分布情况的速度快,还操作方便。
[0099]
本发明提供的一个实施例中,所述第一判断结果、第二判断结果、第三判断结果、第四判断结果以及第五判断结果包括属于同一陶瓷物品和不属于同一陶瓷物品两种情况,在综合所述第一判断结果、第二判断结果、第三判断结果、第四判断结果以及第五判断结果确定所述待分拣瓷片的分拣结果时,包括:
[0100]
分析所述第一判断结果、第二判断结果、第三判断结果、第四判断结果以及第五判断结果的情况,确定所述第一判断结果、第二判断结果、第三判断结果、第四判断结果以及第五判断结果中几个判断结果为属于同一陶瓷物品,几个判断结果为不属于同一陶瓷物品;
[0101]
根据所述第一判断结果、第二判断结果、第三判断结果、第四判断结果以及第五判断结果的情况确定所述待分拣瓷片的分拣结果;当所述第一判断结果、第二判断结果、第三判断结果、第四判断结果以及第五判断结果中所有判断结果均为属于同一陶瓷物品时,所述待分拣瓷片的分拣结果为属于同一陶瓷物品,否则,所述待分拣瓷片的分拣结果为不属于同一陶瓷物品。
[0102]
上述技术方案在综合第一判断结果、第二判断结果、第三判断结果、第四判断结果以及第五判断结果确定待分拣瓷片的分拣结果时,先是分析第一判断结果、第二判断结果、第三判断结果、第四判断结果以及第五判断结果的情况,其中,第一判断结果、第二判断结果、第三判断结果、第四判断结果以及第五判断结果的情况均包括两种,一是属于同一陶瓷物品,二是不属于同一陶瓷物品,通过分析第一判断结果、第二判断结果、第三判断结果、第四判断结果以及第五判断结果的情况确定在第一判断结果、第二判断结果、第三判断结果、第四判断结果以及第五判断结果中几个判断结果出现属于同一陶瓷物品,几个判断结果出现不属于同一陶瓷物品,当且仅当第一判断结果、第二判断结果、第三判断结果、第四判断结果以及第五判断结果中全部为属于同一陶瓷物品时,待分拣瓷片的分拣结果为属于同一陶瓷物品,当第一判断结果、第二判断结果、第三判断结果、第四判断结果以及第五判断结果中出现不属于同一陶瓷物品时,无论是一个,两个还是三个,四个,甚至五个,待分拣瓷片的分拣结果都为不属于同一陶瓷物品。
[0103]
上述技术方案通过分析分析第一判断结果、第二判断结果、第三判断结果、第四判断结果以及第五判断结果的情况确定只有在第一判断结果、第二判断结果、第三判断结果、第四判断结果以及第五判断结果全部为属于同一陶瓷物品时,待分拣瓷片的分拣结果才为属于同一陶瓷物品,从而确保了同一陶瓷物品的碎片在颜色、轮廓、弧度、纹理、侧边颗粒度
分布情况等方面是同时都属于同一陶瓷物品的,提高了待分拣瓷片的分拣结果的精确度,保障了待分拣瓷片在分拣时的准确率。
[0104]
本发明提供的一个实施例中,根据所述待分拣瓷片的分拣结果实现对所述待分拣瓷片的分拣时,按照所述待分拣瓷片的分拣结果追溯属于同一陶瓷物品的待分拣瓷片,并将追溯到的属于同一陶瓷物品的待分拣瓷片直接分拣到一起。
[0105]
上述技术方案在根据待分拣瓷片的分拣结果实现对待分拣瓷片的分拣时,按照待分拣瓷片的分拣结果追溯属于同一陶瓷物品的待分拣瓷片,将所有同一陶瓷物品的待分拣瓷片分拣到一起,实现对待分拣瓷片的分拣。
[0106]
上述技术方案通过按照待分拣瓷片的分拣结果追溯属于同一陶瓷物品的待分拣瓷片,将所有同一陶瓷物品的待分拣瓷片分拣到一起,只需要对待分拣瓷片进行一次分拣,避免根据每次判断结果多次分拣筛选过程中对待分拣瓷片造成再次损坏。
[0107]
如图4所示,本发明提供的一个实施例中,在实现对所述待分拣瓷片的分拣之后针对属于同一陶瓷物品的瓷片进行复原,所述复原的过程包括:
[0108]
s1、确定属于同一陶瓷物品的待复原瓷片;
[0109]
s2、针对所述待复原瓷片进行标记与扫描,得到标记瓷片图像;
[0110]
s3、采用虚拟vr技术针对所述标记瓷片图像进行模拟复原,构建陶瓷物品的立体复原模型;
[0111]
s4、参照所述陶瓷物品的立体复原模型,逐一根据所述标记瓷片图像按照标记信息将所述待复原瓷片进行复原,得到复原陶瓷。
[0112]
上述技术方案在基于人工智能技术进行瓷片复原时,首先,确定属于同一陶瓷物品的待复原瓷片,然后,将属于同一陶瓷物品的待复原瓷片进行标记,使得每一片待复原瓷片都有对应的编号或者名称,再将带有标记信息的待复原瓷片通过扫描得到标记瓷片图像,接着,针对标记瓷片图像通过虚拟vr技术进行编排模拟复原,构建出陶瓷物品的立体复原模型,最后,参照陶瓷物品的立体复原模型,根据陶瓷物品的立体复原模型中每一片瓷片的标记信息追溯到对应的待复原瓷片,将待复原瓷片按照陶瓷物品的立体复原模型进行位置复原,从而得到复原陶瓷。
[0113]
上述技术方案通过虚拟vr技术得到陶瓷物品模拟复原后的陶瓷物品的立体复原模型,不仅效率高,准确度还高,而且陶瓷物品的立体复原模型还能为复原陶瓷提供有效的参考,节省专业人员在复原时一一编排确定位置的时间,提高瓷片复原陶瓷的效率。
[0114]
本领域技术人员应当理解的是,本发明中的第一、第二、第三、第四、第五仅仅指的是不同应用阶段而已。
[0115]
本领域技术客户员在考虑说明书及实践这里公开的公开后,将容易想到本公开的其它实施方案。本技术旨在涵盖本公开的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本公开的一般性原理并包括本公开未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本公开的真正范围和精神由下面的权利要求指出。
[0116]
应当理解的是,本公开并不局限于上面已经描述并在附图中示出的精确结构,并且可以在不脱离其范围进行各种修改和改变。本公开的范围仅由所附的权利要求来限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1