基于MES和数据融合的电力系统鲁棒状态估计方法与流程
基于mes和数据融合的电力系统鲁棒状态估计方法
技术领域
1.本发明涉及电力系统估计方法的技术领域,更具体地说是涉及电力系统鲁棒状态估计方法的技术领域。
背景技术:
2.状态估计se(state estimation,se)技术可用于提高智能电网监控的状态感知和对坏数据的防御能力,其获得的准确状态信息在各种电力系统的高级应用中至关重要,例如电力系统规划、可靠性分析和最优负荷分配等,可靠的数据基础是其它高级应用的基石。
3.状态估计se的目的是,在给定一组冗余测量和准确的网络拓扑结构和参数的情况下,获得对当前系统节点电压模值和相角的最佳估计。因此,se的性能高度依赖于测量的准确性和在假设条件下所建立的估计模型,合理的假设对建立模型至关重要。
4.在状态估计se中,测量会受到测量仪器的误差的影响,甚至会因仪器故障、脉冲通信噪声等而产生严重误差。由于环境和温度的变化,网络参数也会随时间的变化而变化,从而给假设的se模型带来不确定性。另外,在没有足够的现场信息或缺乏校准的情况下,联络节点的零注入信息也可能是错误的。因此,测量噪声在实际电力系统中是未知的,不确定性强,不是传统的高斯(gauss)噪声。
5.然而,在电力系统的现有研究中,测量噪声常被假定为gauss分布,但实际测量统计表明,测量噪声常偏离假定gauss模型,产生异常值。在这种情况下,依赖于测量噪声是gauss假设的现有se方法的性能可能会大大降低。
6.随着相量测量单元pmu(phasor measurement unit)的广泛部署,pmu可提供越来越多的同步电压和电流相量测量,并具有时间戳,且比传统数据采集系统scada(supervisory control and data acquisition)测量具有更高的精度,因此通常用于提高se的准确性以及增强对坏数据的检测和识别能力。但是,来自scada系统和pmu的测量量的采样频率差异很大,从而导致时间偏移问题,因而必须将其统一到同一时间断面下。
7.为解决该问题,可对pmu测量进行缓冲,并采用假设检验来选择最佳缓冲长度。然后,将这些缓冲的pmu测量的样本均值和协方差与scada测量结合一起用于se。对pmu测量,以往一般也假设其误差遵循gauss分布,然而最新统计研究表明,pmu测量噪声遵循重尾分布,而非gauss分布。基于此,文献《ieee工业信息学汇刊》,第二卷,“具有未知测量噪声统计的鲁棒混合状态估计框架”一文中,在非gauss噪声的情况下改善了传统的静态se,但是该文献没有考虑scada和pmu测量之间的时间偏移问题。
技术实现要素:
8.本发明的目的就是为了解决现有技术之不足,而提供一种可提高监控状态感知能力,处理未知的非gauss噪声和scada与pmu测量之间时间偏移问题的基于mes和数据融合的电力系统鲁棒状态估计方法。
9.本发明为了解决上述技术问题所采用的技术解决方案如下:
10.基于mes和数据融合的电力系统鲁棒状态估计方法,首先利用鲁棒马氏距离检测系统异常值并分配适当的权重给所选择的pmu缓冲量测量,然后,基于mes估计器利用这些权重以滤除非gauss的pmu测量噪声,产生一组状态估计结果,同时,再基于mes估计器处理接收到的含未知测量噪声的scada测量,以产生另一组状态估计结果,针对两组估计结果,基于数据融合理论将来自两个独立的mes估计器的估计结果进行融合,以获得最终的最优估计结果。
11.1)量测方程
12.由维纳逼近定理,非gauss分布p(x)都可由已知的gauss分布很好地近似,因此可以用以下模型来模拟非gauss分布误差:
[0013][0014]
式中:ai表示权重,且na表示gauss元素的个数;和∑i表示均值和方差,
[0015]
基于已知测量误差是否服从gauss分布,上式可进一步表示为:
[0016]
g(e)=(1-ε)φ(e)+εk(e)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0017]
式中:φ(e)是测量噪声的多数分布,通常被建模表征为gauss分布;k(e)是未知分布,其被认为是重尾密度,如具有大方差的拉普拉斯密度或gauss密度;0≤ε≤0.5,污染系数,用于调节非gauss分量的贡献,如对于小的ε,该模型表示大部分的误差遵循gauss分布,同时保持小部分的非gauss误差,
[0018]
非gauss噪声下的测量方程,可表示如下:
[0019]
z=h(x)+g(e)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0020]
式中:z表示量测;h(x)表示非线性测量函数;g(e)表示测量误差;
[0021]
2)pmu最佳缓冲长度计算
[0022]
基于马氏距离,确定多pmu测点的最佳缓冲长度,对所有pmu测点,将其作为一个整体,
[0023]
设pmu每秒采样nr=30样本/s,scada采样间隔n
t
=5s,在1个间隔内,pmu采样数n=n
t
*nr=150样本,用z表示采样矩阵,并分为n
subset
=n
t
=5个子集:z=[y1,y2,y3,y4,y5],基于以下步骤计算:
[0024]
(1)计算z矩阵中值:
[0025]
y’=median(z)=[y
’1,y
’2,y
’3,y
’4,y
’5]
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0026]
(2)对y5执行变点检测,若存在变点,则使用最后一个pmu数据;否则y5将包含在pmu缓冲集内;
[0027]
(3)基于马氏距离pi,对η1=[y
’5,y
’4],η2=[y
’4,y
’3],
…
,η4=[y
’2,y
’1]检测系统变化:
[0028][0029]
若η1内的pi均小于则包含y4,否则算法停止;并继续校验η2=[y
’4,y
’3],...,η4=[y
’2,y
’1],直至结束,
[0030]
(4)计算pmu缓冲集内量测均值和方差
[0031][0032][0033]
式中:α表示z’的列数,wi为z’的第i列的权重,
[0034]
基于以上步骤,即可得到多pmu测点的最佳缓冲长度,计算均值和方差后,即可与scada数据在同一断面下实现匹配;
[0035]
3)基于mes与数据融合的鲁棒se方法
[0036]
3.1)基于mes的scada鲁棒se
[0037]
基于mes估计方法,利用scada量测建立mes估计模型,其表达式如下:
[0038][0039]
式中:x表示状态量;hi(x)表示第i个scada的测量函数;wi表示第i个测量权重;zi表示第i个测量;σ表示parzen窗宽;c(x)=0表示零注入节点约束,
[0040]
极坐标下零注入约束可表示为:
[0041][0042]
式中:ψ表示xb与xn的变换关系;b表示零注入功率节点;n表示非零注入节点,
[0043]
γ为:
[0044][0045]
φ为:
[0046][0047]
φ-1
为:
[0048]
[0049]
将该约束代入mes估计模型,得:
[0050][0051]
令:
[0052][0053][0054]
利用newton法求解,得修正方程:
[0055][0056]
式中:h为m
×
n维jacobian矩阵;f和q分别为:
[0057][0058][0059]
状态量修正为:
[0060][0061][0062][0063]
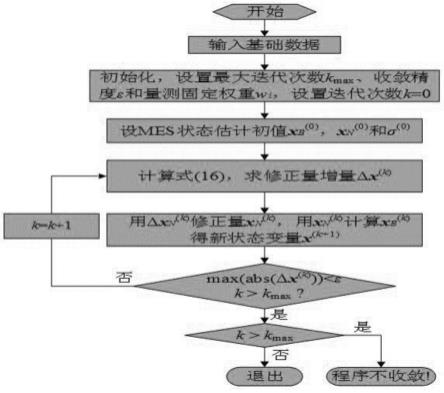
mes估计器求解计算流程如下:
[0064]
⑴
初始化参数,k=0,置x
k,n
初值;
[0065]
⑵
由x
k,n
按式(20)计算x
k,b
;
[0066]
⑶
计算矩阵h、f和q,求解式(16),得并更新计算
[0067]
⑷
若max|δxk|<ε,则状态估计收敛,计算结束,否则转步骤
⑶
;
[0068]
迭代收敛后,基于scada的mes估计的状态误差方差阵为:
[0069]
上述在mes估计模型中嵌入零注入表达式,从而使得等式约束不必显性表达,削除等式约束,无需再使用lagrange乘子法处理,从而提高算法效率;
[0070]
3.2)基于mes的pmu鲁棒se
[0071]
类似于scada鲁棒se,单独使用pmu测量,基于mes模型进行鲁棒估计,但pmu测量为电压与电流相量,其测量函数为线性函数:
[0072][0073]
式中:为pmu缓冲区内量测均值,以之作为伪量测,通过式(7)计算;a为pmu与状态量的关系矩阵,为常系数矩阵,即pmu测量与状态量的jacobian矩阵;ε为pmu量测误差,其方差为通过式(6)计算,
[0074]
基于mes模型,可得:
[0075][0076]
同样利用newton法求解,得修正方程:
[0077][0078]
状态量修正同式(19)-(21),
[0079]
迭代收敛后,基于pmu的mes估计的状态误差方差阵为:
[0080][0081]
3.3)基于数据融合理论的状态融合
[0082]
借鉴数据融合理论,将scada和pmu测量视为不同的数据源,其量测分别采用zs和z
p
表示,基于scada和基于pmu的se器分别称为sse和pse,经分别对zs和z
p
处理可产生两组独立的se结果和相应的误差方差阵由∑s和∑
p
表示,
[0083]
基于和∑s和∑
p
,通过数据融合获得最佳状态融合结果:
[0084][0085]
从上式中可以看出,xs与x
p
的se的权重的分母相同,分子分别为∑
p
和∑s,意味着权重的大小与估计结果的方差成反比,即精度更高的估计结果其权重也相应更大,精度更低的估计结果其权重也相应更小,以上的估计方法称为数据融合se方法,将数据融合与mes估计模型结合,获得最终的最优估计结果。
[0086]
本发明采用上述技术解决方案所能达到的有益效果是:
[0087]
为解决未知的非gauss噪声和scada与pmu测量的时间偏移问题,本方法基于数据融合理论与mes估计模型,提出了一种基于mes和数据融合的电力系统鲁棒se方法。该方法具有以下特点:
[0088]
(1)在mes估计模型中嵌入零注入表达式,从而使得等式约束不必显性表达,削除等式约束,无需再使用lagrange乘子法处理,从而提高算法效率;
[0089]
(2)基于鲁棒马氏距离选择的pmu缓冲测量,并赋予权重,进一步基于mes的se方法,可滤除非gauss测量噪声和异常值;
[0090]
(3)基于mes和数据融合理论,对含未知测量噪声的pmu和scada测量,分别进行se。基于两组估计结果,通过使用数据融合理论将来自两个独立的mes估计器的估计结果进行融合,以获得最终的最优se。
[0091]
基于ieee-14和ieee-30节点标准系统进行了充分的仿真,所得结果证明了本文所提方法的有效性和鲁棒性,且相比现有方法有明显的优势。
附图说明
[0092]
图1为本发明中mes估计模型计算流程图;
[0093]
图2为本发明中数据融合se计算流程图;
[0094]
图3为本发明中ieee-14节点标准系统拓扑结构图;
[0095]
图4为本发明中ieee-30节点标准系统拓扑结构图;
[0096]
图5为本发明中本方法与hwls和twls方法的算法关系图;
[0097]
图6为本发明中拉普拉斯测量噪声下各方法的电压模值绝对误差;
[0098]
图7为本发明中拉普拉斯测量噪声下各方法的电压相角绝对误差;
[0099]
图8为本发明中不同案例下电压模值绝对误差;
[0100]
图9为本发明中不同案例下电压相角绝对误差。
具体实施方式
[0101]
由图1至图9所示,基于一种最大指数平方法mes(maximum exponential square,)和数据融合的电力系统鲁棒状态估计方法,首先利用鲁棒马氏距离检测系统异常值并分配适当的权重给所选择的pmu缓冲量测量,然后,基于mes估计器利用这些权重以滤除非gauss的pmu测量噪声,产生一组状态估计结果,同时,再基于mes估计器处理接收到的含未知测量噪声的scada测量,以产生另一组状态估计结果,针对两组估计结果,基于数据融合理论将来自两个独立的mes估计器的估计结果进行融合,以获得最终的最优估计结果。
[0102]
1)量测方程
[0103]
由维纳逼近定理,非gauss分布p(x)都可由已知的gauss分布很好地近似,因此可以用以下模型来模拟非gauss分布误差:
[0104][0105]
式中:ai表示权重,且na表示gauss元素的个数;和∑i表示均值和方差,
[0106]
基于已知测量误差是否服从gauss分布,上式可进一步表示为:
[0107]
g(e)=(1-ε)φ(e)+εk(e)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0108]
式中:φ(e)是测量噪声的多数分布,通常被建模表征为gauss分布;k(e)是未知分布,其被认为是重尾密度,如具有大方差的拉普拉斯密度或gauss密度;0≤ε≤0.5,污染系数,用于调节非gauss分量的贡献,如对于小的ε,该模型表示大部分的误差遵循gauss分布,
同时保持小部分的非gauss误差,
[0109]
非gauss噪声下的测量方程,可表示如下:
[0110]
z=h(x)+g(e)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0111]
式中:z表示量测;h(x)表示非线性测量函数;g(e)表示测量误差;
[0112]
2)pmu最佳缓冲长度计算
[0113]
基于马氏距离,确定多pmu测点的最佳缓冲长度,对所有pmu测点,将其作为一个整体,
[0114]
设pmu每秒采样nr=30样本/s,scada采样间隔n
t
=5s,在1个间隔内,pmu采样数n=n
t
*nr=150样本,用z表示采样矩阵,并分为n
subset
=n
t
=5个子集:z=[y1,y2,y3,y4,y5],基于以下步骤计算:
[0115]
(1)计算z矩阵中值:
[0116]
y’=median(z)=[y
’1,y
’2,y
’3,y
’4,y
’5]
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0117]
(2)对y5执行变点检测,若存在变点,则使用最后一个pmu数据;否则y5将包含在pmu缓冲集内;
[0118]
(3)基于马氏距离pi,对η1=[y
’5,y
’4],η2=[y
’4,y
’3],
…
,η4=[y
’2,y
’1]检测系统变化:
[0119][0120]
若η1内的pi均小于则包含y4,否则算法停止;并继续校验η2=[y
’4,y
’3],
…
,η4=[y
’2,y
’1],直至结束,
[0121]
(4)计算pmu缓冲集内量测均值和方差
[0122][0123][0124]
式中:α表示z’的列数,wi为z’的第i列的权重,
[0125]
基于以上步骤,即可得到多pmu测点的最佳缓冲长度,计算均值和方差后,即可与scada数据在同一断面下实现匹配;
[0126]
3)基于mes与数据融合的鲁棒se方法
[0127]
3.1)基于mes的scada鲁棒se
[0128]
基于mes估计方法,利用scada量测建立mes估计模型,其表达式如下:
[0129][0130]
式中:x表示状态量;hi(x)表示第i个scada的测量函数;wi表示第i个测量权重;zi表示第i个测量;σ表示parzen窗宽;c(x)=0表示零注入节点约束,
[0131]
极坐标下零注入约束可表示为:
[0132][0133]
式中:ψ表示xb与xn的变换关系;b表示零注入功率节点;n表示非零注入节点,
[0134]
γ为:
[0135][0136]
φ为:
[0137][0138]
φ-1
为:
[0139][0140]
将该约束代入mes估计模型,得:
[0141][0142]
令:
[0143][0144][0145]
利用newton法求解,得修正方程:
[0146][0147]
式中:h为m
×
n维jacobian矩阵;f和q分别为:
[0148][0149][0150]
状态量修正为:
[0151][0152][0153][0154]
基于mes的估计迭代计算流程如图1所示,
[0155]
mes估计器求解计算流程如下:
[0156]
⑴
初始化参数,k=0,置x
k,n
初值;
[0157]
⑵
由x
k,n
按式(20)计算x
k,b
;
[0158]
⑶
计算矩阵h、f和q,求解式(16),得并更新计算
[0159]
⑷
若max|δxk|<ε,则状态估计收敛,计算结束,否则转步骤
⑶
;
[0160]
迭代收敛后,基于scada的mes估计的状态误差方差阵为:
[0161]
上述在mes估计模型中嵌入零注入表达式,从而使得等式约束不必显性表达,削除等式约束,无需再使用lagrange乘子法处理,从而提高算法效率;
[0162]
3.2)基于mes的pmu鲁棒se
[0163]
类似于scada鲁棒se,单独使用pmu测量,基于mes模型进行鲁棒估计,但pmu测量为电压与电流相量,其测量函数为线性函数:
[0164][0165]
式中:为pmu缓冲区内量测均值,以之作为伪量测,通过式(7)计算;a为pmu与状态量的关系矩阵,为常系数矩阵,即pmu测量与状态量的jacobian矩阵;ε为pmu量测误差,其方差为通过式(6)计算,
[0166]
基于mes模型,可得:
[0167][0168]
同样利用newton法求解,得修正方程:
[0169][0170]
状态量修正同式(19)-(21),
[0171]
迭代收敛后,基于pmu的mes估计的状态误差方差阵为:
[0172][0173]
3.3)基于数据融合理论的状态融合
[0174]
借鉴数据融合理论,将scada和pmu测量视为不同的数据源,其量测分别采用zs和z
p
表示,基于scada和基于pmu的se器分别称为sse和pse,经分别对zs和z
p
处理可产生两组独立的se结果和相应的误差方差阵由∑s和∑
p
表示,
[0175]
基于和∑s和∑
p
,通过数据融合获得最佳状态融合结果:
[0176][0177]
从上式中可以看出,xs与x
p
的se的权重的分母相同,分子分别为∑
p
和∑s,意味着权重的大小与估计结果的方差成反比,即精度更高的估计结果其权重也相应更大,精度更低的估计结果其权重也相应更小,以上的估计方法称为数据融合se方法,将数据融合与mes估计模型结合,获得最终的最优估计结果,融合se计算逻辑示意图如图2所示。
[0178]
4)算例仿真与分析
[0179]
4.1)基础数据与仿真条件
[0180]
为对本方法所提基于mes和数据融合电力系统鲁棒状态估计方法的性能进行验证,基于ieee-14节点和ieee-30节点标准系统进行仿真,其拓扑结构图分别如图3ieee-14节点标准系统拓扑结构图和图4ieee-30节点标准系统拓扑结构图所示。
[0181]
对ieee-14节点标准系统,在4、7、14节点上部署了3个pmu,考虑了31个scada测量,其中包括16个支路功率、14个注入功率和1个节点电压幅值。对于ieee-30节点标准系统,考虑38对功率测量,包括15对有功和无功功率注入和23对支路有功和无功功率测量;节点11、12、24、27、30上的有功和无功功率注入,以及支路24-23、25-26、30-27的有功和无功功率是关键测量,6个pmu部署在8、9、12、24、25、26号节点上。
[0182]
使用两种方法与本方案所提方法进行对比:
[0183]
1)混合数据wls估计器(即hwls),将缓冲pmu测量与scada测量结合一起用于se。
[0184]
2)两阶段wls估计器(即twls),该方法首先执行基于scada测量的传统se,其se估计结果进一步与pmu测量相结合,进行第二阶段线性se。
[0185]
利用电压模值和角度估计值的平均绝对误差(mean absolute error,mae)作为整体性能评价指标,本文所提方法与hwls和twls方法的算法关系如图5所示。
[0186]
4.2)仿真结果与分析
[0187]
(1)高斯噪声下
[0188]
首先考虑将已知的gauss噪声叠加到scada和pmu测量中,可更好的了解每种方法的最佳性能。
[0189]
为此,分别将每个scada和pmu测量的噪声假设为具有零均值和方差2
×
10-4
和2
×
10-6
的gauss随机变量。每种方法估计出的电压模值和角度的平均绝对误差分别如表1和表2所示。
[0190]
由表1和表2可知,在gauss量测噪声下,对于ieee-14节点标准系统,hwls的电压模值跟相角的mae分别为5.01
×
10-4
和3.94
×
10-2
,twls的电压模值跟相角的mae分别为4.52
×
10-4
和3.55
×
10-2
,本文所提方法的电压模值跟相角的mae分别为3.74
×
10-4
和3.43
×
10-2
;对于ieee-30节点标准系统,hwls的电压模值跟相角的mae分别为3.77
×
10-4
和2.71
×
10-2
,twls的电压模值跟相角的mae分别为2.99
×
10-4
和9.96
×
10-3
,本文所提方法的电压模值跟相角的mae分别为2.53
×
10-4
和6.72
×
10-3
。
[0191]
因此,本文所提出的方法和twls较好,并且优于hwls方法。这是因为所提出的方法和twls都充分考虑了缓冲pmu测量,避免了混合量测中,量测精度较低的scada对量测精度较高的pmu的影响,从而提高了估计精度。
[0192]
表1高斯噪声下电压模值平均绝对误差(pu)
[0193][0194]
表2高斯噪声下电压相角平均绝对误差(
°
)
[0195][0196]
为进一步评估各种方法在另一gauss噪声水平下的性能。假设每个scada和pmu测量的方差分别增加到6
×
10-3
和6
×
10-5
,基于ieee-30节点标准系统进行验证,其结果如表3所示。
[0197]
表3高斯噪声下各方法电压平均绝对误差
[0198][0199]
由表3可知,对于hwls、twls和所提出的方法,估计电压模值的mae分别为1.57
×
10-3
、1.35
×
10-3
、1.21
×
10-3
,而估计电压相角的mae分别为4.32
×
10-2
、3.33
×
10-2
和1.94
×
10-2
。可知,随着噪声水平的增加,所有方法的估计误差都略有增加,因为在给定的测量冗余水平下,如果噪声水平增加,估计统计效率将降低。然而,本文所提出方法仍然优于其他
两个hwls和twls方法。
[0200]
(2)非高斯噪声下
[0201]
在实际应用中,由于电压互感器和电流互感器的老化过程、环境温度的变化、通信信道噪声等,scada和pmu测量的噪声统计通常是未知的,并且偏离了gauss假设。为评估各方法对未知统计噪声的性能,使用非gauss噪声模型,即gauss混合模型和重尾拉普拉斯噪声进行仿真。具体地,对于scada测量,假设具有两个gauss分量的gauss混合模型(混合后为非高斯),其由零均值和方差2
×
10-4
和2
×
10-3
表示,权重分别为0.95和0.05。而对于pmu测量,假设方差为2
×
10-6
和2
×
10-4
,权重为0.9和0.1。在第二种情况下,具有零均值和尺度参数10-3
的拉普拉斯分布用于scada和pmu测量的噪声。
[0202]
表4非高斯噪声下电压模值平均绝对误差(pu)
[0203][0204]
表5非高斯噪声下电压相角平均绝对误差(
°
)
[0205][0206]
表4和表5分别为在存在由gauss混合模型模拟的非gauss测量噪声的情况下,每种方法估计的电压模值和角度的mae结果。在gauss混合模型噪声下,对于ieee-14节点标准系统,hwls的电压模值跟相角的mae分别为9.41
×
10-3
和0.51,twls的电压模值跟相角的mae分别为8.37
×
10-3
和0.39,本文所提方法的电压模值跟相角的mae分别为6.75
×
10-3
和0.18;对于ieee-30节点标准系统,hwls的电压模值跟相角的mae分别为4.91
×
10-3
和0.34,twls的电压模值跟相角的mae分别为1.95
×
10-3
和0.27,本文所提方法的电压模值跟相角的mae分别为1.42
×
10-3
和0.13。
[0207]
与表1和表2中的gauss噪声情况相比,三种方法的估计误差都有所增加。但是hwls和twls在估计误差方面有更大的增幅,因为它们严重依赖于se的gauss假设。相比之下,本文所提出的基于mes和数据融合的鲁棒估计器的鲁棒性更好,产生了更为合理的se结果。
[0208]
图6和图7所示为在拉普拉斯测量噪声下,hwls、twls和本文所提方法的绝对误差值。由图中结果可知,该结果与表4和表5中所示的结果完全一致。因此,可得出结论,本文所提出的基于mes和数据融合的电力系统鲁棒状态估计方法不要求测量噪声为gauss噪声,在处理非gauss噪声方面具有更好的鲁棒性。
[0209]
(3)对坏数据的鲁棒性
[0210]
为验证本方法所提鲁棒估计器对各种类型的坏数据的鲁棒性,对不良杠杆点、不良关键测量和多个交互的测量存在坏数据的情况下,基于ieee-30节点标准系统进行仿真。
[0211]
分别设置以下4种仿真方案:
[0212]
方案
①
:单个坏数据存在的情况,将8号节有功注入p8改为0.1pu;
[0213]
方案
②
:坏的杠杆量测,将p
19
和p
19-20
改为0.1pu;
[0214]
方案
③
:坏的关键量测,将p
11
改为0.2pu;
[0215]
方案
④
:多个交互影响的坏数据,将p2和q2改为原来的相反数。
[0216]
图8和图9所示为四种方案下不同类型坏数据的仿真结果。显然,由于本文所提出的基于mes和数据融合的鲁棒估计器的鲁棒性由鲁棒的马氏距离和mes估计器提供,各种类型的坏数据的影响是有界的,产生非常小的估计偏差,电压模值估计最大偏差0.00094pu,电压相角估计的最大偏差为0.0075
°
,在实际应用中影响可忽略不计。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1