基于集成学习算法的碳纤维复合材料损伤定位方法
1.本发明涉及碳纤维复合材料损伤定位技术领域,具体涉及一种基于集成学习算法的碳纤维复合材料损伤定位方法。
背景技术:
2.碳纤维复合材料(carbon fiber reinforced plastic,cfrp)因具有质量轻、强度高、抗疲劳性能好等优点被普遍应用在轨道交通、航空航天等领域。近年来cfrp作为一种新型可替换材料逐步引起世界各国的关注。若cfrp作为关键的受力零部件在长时间承受较大的外部载荷时,内部的纤维束会发生断裂,铁道车辆或者航天飞机在运行过程发生cfrp的破坏势必会造成巨大的人员伤亡和财产损失,因此人们希望利用传感器技术结合测量数据评估当前cfrp的健康状态。
3.目前对材料的损伤定位和模式识别做了大量的研究,其中以机器学习算法开展的研究有:张燕君等利用应变传感器,测量304钢板在损伤模式下的静态应变,同时结合粒子群算法和最小二乘支持向量机算法应用于钢板损伤位置识别中。芦吉云等构建了复合材料冲击载荷实时在线监测系统,研究了基于小波包特征提取及支持向量回归机的碳纤维复合材料结构冲击定位方法。路士增等构建光纤布拉格光栅(fbg)传感器网络,同时结合小波分解与重构算法、频谱分析和支持向量多分类机探究cfrp的损伤模式识别问题。艾青林等结合全连接神经网络模型与传递率函数构建了一种识别钢结构损伤监测的方法。jang等通过采集大量冲击点响应信号样本,训练神经网络建立了冲击响应信号和冲击点位置的非线性关系,将待测冲击点响应信号输入训练模型实现冲击点定位。综述所述,复合材料损伤定位识别研究主要依据单一模型实现预测,单一模型预测精度不能保证。
技术实现要素:
4.本发明目的在于提供一种基于集成学习算法的碳纤维复合材料损伤定位方法,该方法组合多个弱学习器形成强学习器,近一步提高早期的损伤诊断率,有效提升学习器的预测性能。
5.为实现上述目的,本发明采用如下技术方案:
6.基于集成学习算法的碳纤维复合材料损伤定位方法,包括如下步骤:
7.(1)选取碳纤维复合材料的受测区域,在所述受测区域建立坐标系xoy,并根据坐标系xoy将所述受测区域均等划分,形成若干个网格坐标,并在坐标系的x轴和y轴方向上分别粘贴应变片;
8.(2)选取已知重量且质量不同三个的重量块,任取一个重量块并将其依次放置在每个网格坐标中获取碳纤维复合材料结构应力变化产生的应变特征信号,三个重量块可以获取三个应变特征信号数据集,并将其对应记载为损伤模式1、2、3;
9.(3)构建集成学习算法模型,所述集成学习算法模型包括以支持向量回归机为弱学习器的svr_adaboost模型,以cart树为弱学习器的随机森林模型、极端随机树模型和梯
度提升决策树模型;
10.(4)将损伤模式1采集的应变特征信号以及所述应变特征信号对应的网格坐标数据输入到步骤(3)构建的集成学习算法模型中训练所述集成学习算法模型,其中70%的数据进行集成学习算法模型训练,30%的数据进行集成学习算法模型测试;将损伤模式2、3采集的应变特征信号输入到训练后的所述集成学习算法模型中实现损伤定位用于验证集成学习模型在损伤定位应用领域具有迁移学习能力。
11.进一步地,对步骤(2)采集的应变特征信号进行数据归一化处理,所述数据归一化处理包括消除基线漂移并进行降噪处理。
12.进一步地,训练后的集成学习算法模型采用皮尔逊相关系数和均方根误差预测模型精度。
13.进一步地,所述集成学习算法最优模型的弱学习器迭代次数为35次。
14.本发明在碳纤维复合材料损伤定位中集成学习算法可实现损伤定位,并具有迁移学习能力。
附图说明
15.图1为本发明受测区域坐标划分示意图。
16.图2为本发明相关系数与弱学习器迭代次数之间的变化关系示意图。
17.图3为本发明rmse与弱学习器迭代次数之间的变化关系示意图。
18.图4为本发明预测整体坐标测试误差与弱学习器迭代次数之间的变化关系示意图。
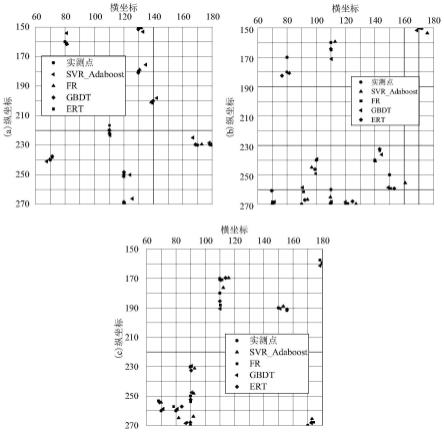
19.图5为本发明的预测坐标和实际坐标之间对比示意图。
具体实施方式
20.本实施例提供的一种基于集成学习算法的碳纤维复合材料损伤定位方法包括如下步骤:
21.(1)选取碳纤维复合材料的受测区域,在所述受测区域建立坐标系xoy,并根据坐标系xoy将所述受测区域均等划分,形成若干个网格坐标,并在坐标系的x轴和y轴方向上分别粘贴应变片;
22.(2)选取已知重量且质量不同三个的重量块,任取一个重量块并将其依次放置在每个网格坐标中获取碳纤维复合材料结构应力变化产生的应变特征信号,三个重量块可以获取三个应变特征信号数据集,并将其对应记载为损伤模式1、2、3;
23.(3)构建集成学习算法模型,所述集成学习算法模型包括以支持向量回归机为弱学习器的svr_adaboost模型,以cart树为弱学习器的随机森林模型、极端随机树模型和梯度提升决策树模型;
24.(4)将损伤模式1采集的应变特征信号以及所述应变特征信号对应的网格坐标数据输入到步骤(3)构建的集成学习算法模型中训练所述集成学习算法模型,其中70%的数据进行集成学习算法模型训练,30%的数据进行集成学习算法模型测试;将损伤模式2、3采集的应变特征信号输入到训练后的所述集成学习算法模型中实现损伤定位用于验证集成学习模型在损伤定位应用领域具有迁移学习能力。
25.通过实验验证本实施例的有效性。
26.为模拟在静态作用力下cfrp的损伤,所选cfrp规格为450mm
×
450mm
×
3mm,选取120mm
×
120mm的实验区域,示意图如图1所示。图中虚线框表示此次进行损伤识别的受测区域,并在受测区域旁粘贴2个单轴电阻应变片1和2。将受测区域均等划分为13
×
13的网格坐标,每个网格长度10mm,划分完成之后共有169个坐标点。将cfrp四端支撑,用400g,500g,600g的质量块依次施加在169个坐标点上,测量cfrp的应变量,得到三种损伤模式下的应变特征数据总计507组。将400g、500g和600g实验工况依次记为损伤模式1、2和3,同一重物施加在不同位置用来模拟不同的损伤位置,不同的重物施加在同一位置用来模拟不用的损伤模式。重物加载引起cfrp结构应力的变化,对力学特性产生影响是仿真分析和实验测试中常用损伤模拟方式。单次实验采集169组数据,由imc数采进行应变数据采集,在计算机上实时显示应变数值。
27.由于应变片的温升效应在测量过程中数据发生了漂移,且随着时间的增长漂移量变大。在实验过程中测量信号的部分区域出现了突变点,信号稳定后扔存在一定的波动,对于应变特征量的选取存在一定的干扰,为提取有效的应变特征需要消除基线漂移并对信号进行降噪处理。
28.为实现最终的坐标预测,预测x坐标和y坐标采用相同模型分别建模,构建两输入单输出模型,依次建立支持向量回归机和cart树对数据进行训练,损伤模式1下的169组数据进行归一化处理后取135组作为训练集进行模型训练,其余34组数据作为测试集进行模型测试。
29.支持向量回归机核函数选取高斯径向基核函数,结合python编程语言实现网格搜索法选择最优松弛变量γ和惩罚力度c,x坐标模型拟合效果最优时(γ
x
,c
x
)=(1.02,4.21),y坐标模型拟合效果最优时(γy,cy)=(3.05,11.58)。
30.cart树以最大树深作为优化变量,设置最小分割节点的样本数目为2,叶节点最小样本数目为1,选用平方误差损失函数进行回归树内部参数调整。x,y坐标模型拟合效果最优时最大树深均为10。
31.将最优支持向量回归机模型(svr)作为adaboost的弱学习器对数据进行训练,同时对比由最优cart树为弱学习器组成的随机森林(rf)、极端随机树(ert)和梯度提升决策树(gbdt)的预测精度。
32.图2给出了四种集成学习模型在测试集上预测x坐标和y坐标与实际坐标之间的相关系数与弱学习器迭代次数之间的变化关系。由数据可以看出svr_adaboost模型预测的x、y坐标相关性均随着迭代次数的增加而增加,x轴相关系数最大为0.9876,y轴最大为0.9848,在迭代10次后,相关系数趋于稳定,随机森林(rf)模型预测y轴坐标的相关系数在迭代22次后趋于稳定,最大为0.9857,x轴坐标相关系数随迭代次数增加呈现下降趋势,最大为0.9905。梯度提升决策树(gbdt)模型x,y轴坐标相关系数随迭代次数的增加变化不明显,x轴相关系数最大为0.9889,y轴为0.9711。极端随机树(ert)模型预测x坐标相关系数最大为0.9918,y轴为0.9853,随着迭代次数的增加,相关系数逐渐增大并在迭代20次后趋于稳定。从总体变化趋势可以发现,集成学习模型具备提高预测坐标与实际坐标之间相关性的能力。
33.图3给出了测试集预测值和实测值之间的rmse与弱学习器迭代次数之间的变化关
系。结合数据发现,随着迭代次数的逐渐增加,所有模型预测的x,y坐标均方根误差逐渐减小且趋于稳定,rmse最低为svr_adaboost模型,x坐标误差最低为6.64,y轴最低为6.48。rf、gbdt和ert三个树模型预测结果均方根误差较大,三者中x,y轴最小均方根误差为10.04和11.61,且均出现在随机森林模型中。由总体趋势看出迭代次数的增加可以降低模型预测误差。
34.将横纵坐标进行组合,图4给出四种集成学习模型在相同测试集上预测整体坐标时测试误差与弱学习器迭代次数之间的变化关系,数据显示模型迭代次数达到35次时,所有模型预测误差逐渐降低且趋于稳定状态,此时极端随机树(ert)和随机森林(rf)模型预测误差接近,svr_adaboost模型和梯度提升决策树(gbdt)模型预测误差接近,rf模型预测误差为2.66%,ert模型预测误差为2.56%,svr_adaboost模型预测误差为3.45%,gbdt模型最低预测误差为3.63%。最优模型为迭代次数为35时的ert模型。图5(a)给出了集成学习模型弱学习器在迭代35次之后测试集上10个预测点与实际点之间坐标关系。
35.将损伤模式2和损伤模式3的数据归一化,各随机选取34组带入上述弱学习器迭代35次的集成学习模型中。在损伤模式2的预测误差中,gbdt模型预测误差最小,为12.4%;rf模型预测误差最大,为16.3%。在损伤模式3的预测误差中,gbdt模型预测误差最小,为10.9%。rf模型预测误差最大,为18.6%,集成学习模型仍具有较高的预测精度。图5(b)和图5(c)展示了损伤模式2、3下的10个预测点坐标示意图。
36.以上,在碳纤维复合材料损伤定位中集成学习算法可实现损伤定位,并具有迁移学习能力。
37.以上所述仅是本发明优选的实施方式,但本发明的保护范围并不局限于此,任何基于本发明所提供的技术方案和发明构思进行的改造和替换都应涵盖在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1