基于深度学习的腰椎节段内固定方式仿真方法及系统
1.本发明属于图像处理与生物力学仿真技术领域,具体涉及一种基于深度学习的腰椎节段内固定方式仿真方法及系统。
背景技术:
2.本部分的陈述仅仅是提供了与本发明相关的背景技术信息,不必然构成在先技术。
3.脊柱疾病包括腰椎退变性疾病、畸形、骨折以及肿瘤等,并且发病患者越来越年轻化,常见于l4-l5腰椎节段。患者临床表现多为腰骶部酸痛、牵连引发下肢疼痛,不能直立等,严重者可能会导致大小便失禁,甚至是瘫痪,很大程度上降低了患者的生活质量。目前针对该疾病,临床治疗多采用通过“微创手术”的方式施加内固定进行治疗,普遍为椎弓根内固定与cbt内固定技术,该手术方式是目前国际上治疗腰椎滑脱症、腰椎失稳症及胸腰椎骨折等脊柱疾病的一种先进的手术方式。内固定技术就是用金属螺钉、棒等器械,将不稳定的腰椎节段连接固定起来,利用内固定保持局部减少活动,稳定腰椎。椎弓根螺钉与cbt螺钉联合双节段内固定方式已在临床脊柱微创治疗方向得到了应用。
4.发明人发现,临床研究指标结果显示椎弓根螺钉与cbt螺钉联合双节段内固定方式稳定性较好,并且使微创刀口大大缩短,但无法探寻其力学性能。
技术实现要素:
5.为了解决上述问题,本发明提出了一种基于深度学习的腰椎节段内固定方式仿真方法及系统,本发明通过深度学习方法与有限元分析方法实现了腰椎节段椎弓根螺钉与cbt螺钉联合内固定方式的精准仿真模拟。
6.根据一些实施例,本发明的第一方案提供了一种基于深度学习的腰椎节段内固定方式仿真方法,采用如下技术方案:
7.一种基于深度学习的腰椎节段内固定方式仿真方法,包括:
8.获取ct腰椎节段扫描图像;
9.对获取的ct腰椎节段扫描图像进行分割,得到椎体结构图像;
10.基于分割后的椎体结构重建出三维椎体模型并进行预处理;
11.基于预处理后的三维椎体模型,进行腰椎节段部件的添加和装配,得到固定后的三维椎体节段模型;
12.基于三维椎体节段模型,对其部件进行网格划分;
13.基于网格划分后的三维椎体节段模型进行有限元分析,得到腰椎节段内固定方式的仿真结果。
14.进一步地,所述对获取的ct腰椎节段扫描图像进行分割,得到椎体结构,包括:
15.基于深度学习3d u-net卷积神经网络进行椎体分割;
16.将获取的ct腰椎节段扫描图像输入到深度学习3d u-net卷积神经网络中;
17.通过下采样对ct腰椎节段扫描图像进行特征提取,得到ct腰椎节段扫描图像的特征图;
18.通过反卷积层对ct腰椎节段扫描图像的特征图进行上采样,得到分割后的椎体结构图像。
19.进一步地,所述深度学习3d u-net卷积神经网络包括编码器和解码器;
20.所述解码器包含有四个不同分辨率的网络层,每一个分辨率层包含两个卷积层、一个relu激活层和一个最大池化层;
21.所述解码器包含有四个不同分辨率的网络层,每一个分辨率层包含两个反卷积层、两个卷积层和一个relu激活层。
22.进一步地,所述基于分割后的椎体结构重建出三维椎体模型并进行预处理,包括:
23.将完成分割之后的椎体结构图像导入到mimics,直接重建出三维椎体模型;
24.基于完整的三维椎体模型使用smoothing光滑工具,进行椎体表面局部与全部优化;
25.得到预处理后的三维椎体模型。
26.进一步地,所述基于分割后的椎体结构重建出三维椎体模型并进行预处理,还包括:
27.基于预处理后的三维椎体模型,再次进行光滑优化处理;
28.光滑优化处理后的三维椎体模型经过精确曲面、探测曲率、构造曲面片、构造格栅与拟合曲面操作,拟合出nurbs实体曲面,得到三维实体曲面椎体模型。
29.进一步地,所述基于预处理后的三维椎体模型,进行腰椎节段部件的添加和装配,得到固定后的三维椎体节段模型,包括:
30.基于椎间盘的l4椎体下表面与l5椎体上表面确定上下终板、髓核、纤维环,重建并添加完整的椎间盘结构模型;
31.模拟手术位置,将cbt螺钉置入l4椎体,椎弓根螺钉置入l5椎体;
32.根据l4-l5椎体上下螺钉位置制作钉棒,将椎弓根螺钉与cbt螺钉连接,旋紧螺帽,使螺帽与螺钉所带螺纹互相吻合,完成椎弓根螺钉与cbt螺钉内固定系统装配;
33.得到固定后的三维椎体节段模型。
34.进一步地,所述基于网格划分后的三维椎体节段模型进行有限元分析,得到腰椎节段内固定方式的仿真结果,包括:
35.设置分析步为静力通用类型,单元定义为几何非线性;
36.在分析步中创建场输出与历程输出,设定好结果分析的指标;
37.对模型各部件添加相互作用、设置表面-表面绑定约束;
38.添加载荷与边界条件,模拟屈曲、伸展、左右侧弯以及左右旋转六种运动情况;
39.基于六种运动情况模型进行求解,对错误指示进行调整修改,求出正确解;
40.基于正确解和结果分析的指标绘制三维椎体节段模型的云图,即腰椎节段内固定方式的仿真结果。
41.根据一些实施例,本发明的第二方案提供了一种基于深度学习的腰椎节段内固定方式仿真系统,采用如下技术方案:
42.一种基于深度学习的腰椎节段内固定方式仿真系统,包括:
43.图像获取模块,被配置为获取ct腰椎节段扫描图像;
44.图像分割模块,被配置为对获取的ct腰椎节段扫描图像进行分割,得到椎体结构图像;
45.图像重建模块,被配置为基于分割后的椎体结构重建出三维椎体模型并进行预处理;
46.部件装配模块,被配置为基于预处理后的三维椎体模型,进行腰椎节段部件的添加和装配,得到固定后的三维椎体节段模型;
47.网格划分模块,被配置为基于三维椎体节段模型,对其部件进行网格划分;
48.有限元分析模块,被配置为基于网格划分后的三维椎体节段模型进行有限元分析,得到腰椎节段内固定方式的仿真结果。
49.根据一些实施例,本发明的第三方案提供了一种计算机可读存储介质。
50.一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如上述第一个方面所述的一种基于深度学习的腰椎节段内固定方式仿真方法中的步骤。
51.根据一些实施例,本发明的第四方案提供了一种计算机设备。
52.一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述第一个方面所述的一种基于深度学习的腰椎节段内固定方式仿真方法中的步骤。
53.与现有技术相比,本发明的有益效果为:
54.本发明使用深度学习u-net网络分割图像,很大程度改善图像标注费事费力的现状,并且能够得到更加精确的三维椎体模型,从而实现对于腰椎节段的精确仿真,为保证手术安全进行以及后续康复,对临床手术治疗提供具有指导意义的参考方案。
附图说明
55.构成本发明的一部分的说明书附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。
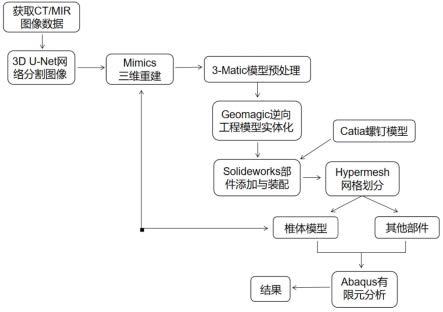
56.图1是本发明实施例所述的基于深度学习的腰椎节段内固定方式仿真方法流程示意图;
57.图2是本发明实施例所述的基于3d u-net的图像分割网络架构示意图;
58.图3是本发明实施例所述的有限元分析流程中的模型示意图;
59.图4是本发明实施例中所述的内固定模型在六种活动状况下的结果云图。
具体实施方式
60.下面结合附图与实施例对本发明作进一步说明。
61.应该指出,以下详细说明都是例示性的,旨在对本发明提供进一步的说明。除非另有指明,本文使用的所有技术和科学术语具有与本发明所属技术领域的普通技术人员通常理解的相同含义。
62.需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本发明的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包
括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合。
63.在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
64.实施例一
65.如图1-图4所示,本实施例提供了一种基于深度学习的腰椎节段内固定方式仿真方法,包括:
66.获取ct腰椎节段扫描图像;
67.对获取的ct腰椎节段扫描图像进行分割,得到椎体结构图像;
68.基于分割后的椎体结构重建出三维椎体模型并进行预处理;
69.基于预处理后的三维椎体模型,进行腰椎节段部件的添加和装配,得到固定后的三维椎体节段模型;
70.基于三维椎体节段模型,对其部件进行网格划分;
71.基于网格划分后的三维椎体节段模型进行有限元分析,得到腰椎节段内固定方式的仿真结果。
72.具体地,本实施例所述的方法包括以下步骤:
73.s1:医学图像获取。首先获取患者医学图像,使用电子计算机断层扫描(ct)对患者腰椎l4-l5节段扫描成像。所选患者是无脊柱疾病的正常患者。
74.本发明选取的是无脊柱疾病的正常患者,对其腰椎l4-l5双节段进行ct扫描,获得医学数字图像,并将其保存为dicom格式文件。
75.s2:医学图像分割。对于扫描获得的腰椎l4-l5阶段的ct医学图像,要对其进行分割,分割出椎体结构。本实验采用深度学习3d u-net卷积神经网络进行椎体分割。
76.使用一个标准的3d u-net网络,通过上采样结合下采样生成预测图像。在此网络结构中,将原始图像作为输入,通过下采样进行特征提取。然后,解码器通过反卷积层逐渐对特征图进行上采样,得到最终的分割图像。
77.本发明使用的网络结构包含有特征编码和特征解码两个部分,两个部分分别含有四种不同分辨率的网络层。在编码器部分的每一个分辨率层包含两个卷积核大小为3
×3×
3的卷积层和一个relu,随后伴随着一个步长为2,卷积核大小为2
×2×
2的最大池化层,一方面减少了特征图,简化了网络计算的复杂性;另一方面,进行了特征压缩和提取,减少特征维度。其中最大池化的公式如下所示:
[0078][0079]
其中,y
khwd
表示第k个特征图经过池化操作的输出结果,x
kmni
表示池化区域中(m,n,i)位置的元素。通过该过程,得到了该层的c特征图的数值分布。
[0080]
在解码部分中,每一个分辨率层包含两个卷积核大小为2
×2×
2的反卷积层,紧接着是两个卷积核为3
×3×
3的卷积层和一个relu。将编码路径中相同的分辨率层通过跳跃连接与解码部分的特征图进行特征融合到解码路径,使其提供原始的高分辨率特征。最后在输出层,使用卷积核大小为1
×1×
1的卷积层,并通过sigmoid激活函数获得最后的预测结果,最终输出结果个数为标签类别数。整体网络结构如图2所示。
[0081]
本发明使用的网络结构包含有特征编码和特征解码两个部分,两个部分分别含有四种不同分辨率的网络层。在编码器部分的每一卷积层包含两个3
×3×
3的卷积核和一个
relu激活层,然后是一个卷积核大小为2
×2×
2的最大池化层,步长为2。在解码部分中,每一个分辨率层包含两个步长为2,卷积核大小为2
×2×
2的反卷积层,紧接着是两个卷积核为3
×3×
3的卷积层和一个relu激活层。将编码路径中相同的分辨率层通过跳跃连接与解码部分的特征图进行特征融合到解码路径,使其提供原始的高分辨率特征。最后将得到的特征图放入卷积核是1
×1×
1的卷积层,以减少输出通道数,并最终输出通道数为标签类别数。
[0082]
s3:医学图像重建。将完成分割之后的椎体图像导入到mimics,直接重建出三维椎体模型,之后将完整的三位椎体模型保存为.stl格式文件。
[0083]
s4:mimics重建出的三维椎体模型表面凹凸不平,平整性差,后续分析无法使用,故使用3-matic对.stl文件进行预处理。
[0084]
将导入的表面具有瑕疵的三维椎体模型,使用smoothing光滑工具,进行椎体表面局部与全部优化,预处理完成,保存并导出.stl格式数据图像文件。
[0085]
s5:预处理完成的stl格式数据图像文件模型是由三角面片组成的单元集合,仅显示闭合表面,不具备实体特征,可将其导入逆向工程软件geomagic中使表面模型转换为实体模型。
[0086]
导入后的三角面片模型需要进行多边形处理,使用网格医生、简化、删除钉状物与减少噪音工具对模型再次光滑优化处理,处理之后的多边形模型,经过精确曲面、探测曲率、构造曲面片、构造格栅与拟合曲面操作,拟合出nurbs实体曲面,并将实体曲面椎体模型保存为.igs格式数据图像文件。
[0087]
通过以上处理流程,基本完成可用于后续分析的椎体模型建模。
[0088]
s6:椎体建模完成,需在solidworks中完成螺钉和椎间盘等其他部件进行添加装配。
[0089]
首先椎间盘的添加需根据解剖结构与关系,根据l4椎体下表面与l5椎体上表面确定,并进一步确定上下终板、髓核、纤维环,重建并添加完整的椎间盘结构模型。其次,椎弓根螺钉与cbt螺钉以及螺帽均在catia软件中制作完成。根据手术指定位置,使用复制旋转移动等工具将cbt螺钉置入l4椎体,椎弓根螺钉置入l5椎体,置入完成后,使用布尔减运算工具减去椎体模型重叠部分;再次,根据l4-l5椎体上下螺钉位置制作钉棒,将椎弓根螺钉与cbt螺钉连接,旋紧螺帽,使螺帽与螺钉所带螺纹互相吻合,完成椎弓根螺钉与cbt螺钉内固定系统装配,模拟椎弓根螺钉与cbt螺钉腰椎l4-l5双节段内固定术。最后,将内固定系统中的各模型部件逐个保存为.step格式数据图像文件。
[0090]
s7:使用hypermesh将装配完成后的各step格式模型部件进行网格划分。
[0091]
在hypermesh中导入装配完成的.step格式文件,首先,需要进行几何清理,优化曲面片,促使网格能够顺利划分;其次,对每个模型部件使用automesh工具自动划分2d单元面网格,选取三角形类型进行单元划分,并设定椎体网格尺寸为2mm,其余各部件网格尺寸缩减为1mm,为确保后续分析结果更加精确;再次,在qualityindex工具操作下检查网格单元质量,根据规则调整不满足的网格单元,从而达到优化网格单元的效果;最后,根据2d面网格自动生成3d体网格,单元类型设定为四面体单元(c3d4),删除2d面网格并保留3d体网格,将3d体网格模型保存为.inp格式数据图像文件。
[0092]
s8:为确保有限元分析能够高度还原,需对l4-l5椎体添加材料属性。由于椎体内
皮质骨与松质骨交界处不明显,并且骨质不均匀,存在各向异性,因此本发明对椎体赋值使用椎体经验公式,使椎体模型更加接近真实椎体特性。
[0093]
使用mimics导入.inp文件,根据基于ct扫描图像数据为体网格每一个单元计算出享氏单位灰度值,然后根据不同灰度范围定义椎体相应材料,由腰椎经验赋值公式将椎体模型赋值为十种梯度材料,弹性模量值由表观密度确定,泊松比设为0.3。
[0094]
上述腰椎经验赋值公式为:
[0095]
ρ=47+1.122
×
hu
[0096]
e=1.92
×
ρ-170
[0097]
v=0.3
[0098]
hu为灰度值,ρ为表观密度,e为弹性模量,v为泊松比。
[0099]
s9:将上述.inp文件导入abaqus中进行有限元分析,需要有以下8个模块的设置:
[0100]
①
网格模块,根据韧带组织结构与关系,在编辑网格单元工具操作下,建立前纵韧带、后纵韧带、黄韧带、棘上韧带、棘间韧带、横突间韧带以及关节囊韧带七种韧带,韧带类型设置为桁架。
[0101]
②
属性模块,模型中出椎体以外的其他各部件也需添加材料属性,设置弹性材料类型为各向同性,添加弹性模量与泊松比数据。
[0102]
③
装配模块,将所以部件装配成一个完整非独立模型,合并切割模型,保证模型无相离与相交部分。
[0103]
④
分析步模块,添加有限元分析步,设置分析步为静力通用类型,单元定义为几何非线性,在分析步中创建场输出与与历程输出,设定好结果分析的指标。
[0104]
⑤
相互作用模块,对各部件添加相互作用、设置表面-表面绑定约束,将模型的两部分区域绑定在一起,二者之间不发生相对运动。
[0105]
⑥
添加载荷与边界条件,首先为使模型稳定,将l5下边面完全固定;其次,为模拟人体自重在l4椎体上表面施加向下集中力500n,并施加10nm扭矩模拟屈曲、伸展、左右侧弯以及左右旋转六种运动情况。
[0106]
⑦
作业模块,分别提交六种运动状况模型并对其求解,对错误提示进行调整修改,求出正确解。
[0107]
⑧
可视化模块,查看所需指标结果并绘制云图。可查看完整模型也可对比单个或几个部件云图与数值。
[0108]
s10:如图4所示,有限元分析完成总装求解后,在可视化模块中可以得到模型的应力、应变、位移等结果。对于活动度(rom)的测量,需要使用ug nx软件实现。通过对云图及数值进行观察分析,可得到基于深度学习与腰椎节段两种螺钉联合内固定方式生物力学定量数据可靠结果,同时通过与其他内固定方式进行比较,并结合临床数据,可探索腰椎节段两种螺钉联合内固定方式的生物力学优势。
[0109]
实施例二
[0110]
本实施例提供了一种基于深度学习的腰椎节段内固定方式仿真系统,包括:
[0111]
图像获取模块,被配置为获取ct腰椎节段扫描图像;
[0112]
图像分割模块,被配置为对获取的ct腰椎节段扫描图像进行分割,得到椎体结构图像;
[0113]
图像重建模块,被配置为基于分割后的椎体结构重建出三维椎体模型并进行预处理;
[0114]
部件装配模块,被配置为基于预处理后的三维椎体模型,进行腰椎节段部件的添加和装配,得到固定后的三维椎体节段模型;
[0115]
网格划分模块,被配置为基于三维椎体节段模型,对其部件进行网格划分;
[0116]
有限元分析模块,被配置为基于网格划分后的三维椎体节段模型进行有限元分析,得到腰椎节段内固定方式的仿真结果。
[0117]
上述模块与对应的步骤所实现的示例和应用场景相同,但不限于上述实施例一所公开的内容。需要说明的是,上述模块作为系统的一部分可以在诸如一组计算机可执行指令的计算机系统中执行。
[0118]
上述实施例中对各个实施例的描述各有侧重,某个实施例中没有详述的部分可以参见其他实施例的相关描述。
[0119]
所提出的系统,可以通过其他的方式实现。例如以上所描述的系统实施例仅仅是示意性的,例如上述模块的划分,仅仅为一种逻辑功能划分,实际实现时,可以有另外的划分方式,例如多个模块可以结合或者可以集成到另外一个系统,或一些特征可以忽略,或不执行。
[0120]
实施例三
[0121]
本实施例提供了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如上述实施例一所述的一种基于深度学习的腰椎节段内固定方式仿真方法中的步骤。
[0122]
实施例四
[0123]
本实施例提供了一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述实施例一所述的一种基于深度学习的腰椎节段内固定方式仿真方法中的步骤。
[0124]
本领域内的技术人员应明白,本发明的实施例可提供为方法、系统、或计算机程序产品。因此,本发明可采用硬件实施例、软件实施例、或结合软件和硬件方面的实施例的形式。而且,本发明可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器和光学存储器等)上实施的计算机程序产品的形式。
[0125]
本发明是参照根据本发明实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
[0126]
这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
[0127]
这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计
算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
[0128]
本领域普通技术人员可以理解实现上述实施例方法中的全部或部分流程,是可以通过计算机程序来指令相关的硬件来完成,所述的程序可存储于一计算机可读取存储介质中,该程序在执行时,可包括如上述各方法的实施例的流程。其中,所述的存储介质可为磁碟、光盘、只读存储记忆体(read-only memory,rom)或随机存储记忆体(random accessmemory,ram)等。
[0129]
上述虽然结合附图对本发明的具体实施方式进行了描述,但并非对本发明保护范围的限制,所属领域技术人员应该明白,在本发明的技术方案的基础上,本领域技术人员不需要付出创造性劳动即可做出的各种修改或变形仍在本发明的保护范围以内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1