墙体结构孔气密性检测的图像识别方法与流程
1.本发明涉及墙体结构孔气密性检测,特别涉及一种墙体结构孔气密性检测的图像识别方法、墙体结构孔气密性检测的方法及装置。
背景技术:
2.红外热像技术利用红外辐射原理,通过测取目标物体表面的红外辐射能,将被测物体表面的温度分布转换为形象直观的热像图像。红外热像技术是目前最为活跃的研究热点之一。它具有以下特点:(1)测量结果直观形象。红外热像仪以彩色或黑白图像的方式输出被测目标表面的温度场,不仅比单点测温提供更为完整、丰富的信息,且非常直观形象。获得了越来越广泛的关注,已在材料缺陷的检测与评价、建筑节能评价、设备状态热诊断等诸多方面获得了应用;(2)非接触测量。由于测取的是物体表面的红外辐射能,不用接触被测物体,也不会干扰被测的温度场,故红外热像技术非常适合于测量运动的物体、危险的物体和不易接近的物体;(3)测量范围宽。
3.目前红外热像检测技术刚起步,特别是对建筑墙体密封后的结构孔以及穿墙水管、电线管、风管等穿墙管;用于人防工程有密闭性能要求的场所和防生化武器的场所中的穿墙管;消防工程中穿过防火墙、防火隔墙或楼板的穿墙管的气密性红外检测技术研究尚属空白。
技术实现要素:
4.为了克服现有技术的上述缺点与不足,本发明的目的在于提供一种墙体结构孔气密性检测的图像识别方法,有效提高了气密性判定的准确性。
5.本发明的另一目的在于提供一种墙体结构孔气密性检测的方法。
6.本发明的再一目的在于提供一种墙体结构孔气密性检测的装置。
7.本发明的目的通过以下技术方案实现:一种墙体结构孔气密性检测的图像识别方法,包括以下步骤:s31对训练集中的红外图像中温度异常区域的任意像素点,以该像素点为起始点建立二维坐标系,转换为二维坐标系的像素点具有x和y坐标,从所述起始点以距离d为半径做圆;如果圆内的点数等于或大于设定的最小点数,则视为一个团簇;如果相邻点的数量小于设定的最小点数,则相应点视为噪声,将之舍弃;其中,d为预设值;s32 对训练集中的红外图像中温度异常区域的所有像素点,重复步骤s31; s33将训练集中的红外图像划分为m个网格,m为预设值;对于第j个网格,j=1,2
…
m;采用协方差矩阵计算特征值和特征值:
其中,n为第j个网格中团簇的个数;xi和yi分别为第i个团簇中的所有x坐标形成的一阶矩阵和所有y坐标形成的一阶矩阵,分别是第i个团簇中x的平均值和y的平均值;s34 计算第j个网格的第一特征值γj:s35对于第j个网格中的温度差异边缘区域,采用不规则多边形包含分布不规则的像素点;α是不规则多边形的面积,β是不规则多边形中团簇簇的个数;计算第j个网格的第二特征值δj:所述不规则多边形为包含所有分布不规则的像素点的面积最小的不规则多边形;s36 记录每个网格所包含的所有像素点aj;s37 以、为输入向量,以为输出向量,输入到神经网络中进行训练,并通过验证集中的红外图像进行验证,得到墙体结构孔气密性检测的检测模型;s38获取待测的墙体的红外图像,采用步骤s37得到的墙体结构孔气密性检测的检测模型进行检测。
8.优选的,步骤s33中所述将训练集中的红外图像划分为m个网格,具体为:将训练集中的红外图像划分为m
×
m个网格;其中m取值大于100。
9.优选的,步骤s37所述神经网络为bp神经网络。
10.优选的,所述不规则多边形为梯形。
11.一种墙体结构孔气密性检测的检测方法,包括以下步骤:s1在墙体的一侧正对孔洞密闭后的部位设置风机单元,在墙体的另一侧正对孔洞密闭后的部位设置红外成像单元;s2通过风机单元进行吹风,通过红外成像单元获得待测密闭后的结构孔的红外图像;s3 采用所述的墙体结构孔气密性检测的图像识别方法对待测密闭后的结构孔的红外图像进行识别。
12.一种墙体结构孔气密性检测的检测装置,包括风机单元、红外成像单元和数据处理单元;
所述数据处理单元包括处理器和存储器;所述存储器上存储有非暂时性计算机指令,当所述非暂时性计算机指令被处理器运行时,执行所述的墙体结构孔气密性检测的图像识别方法。
13.优选的,所述的墙体结构孔气密性检测的检测装置,还包括用于将风机单元固定在墙体上的连接装置。
14.优选的,所述风机单元包括壳体及安装在壳体内的至少一个风扇及至少一个电阻加热器。
15.优选的,所述红外成像单元包括暗箱及安装在暗箱内的红外相机。
16.一种存储介质,用于存储非暂时性计算机指令,当所述非暂时性计算机指令被运行时,执行所述的墙体结构孔气密性检测的图像识别方法。
17.与现有技术相比,本发明具有以下优点和有益效果:本发明先对训练集中的红外图像进行数字化团簇选取,再对红外图像的复杂边缘进行数字化团簇选取,得到红外图像的第一特征值和第二特征值,输入神经网络中进行训练,得到墙体结构孔气密性检测的检测模型,采用得到的墙体结构孔气密性检测的检测模型进行检测。本发明实现了墙体结构孔气密性测的自动检测,节约了大量人力、材料及时间成本,有效提高了气密性判定的准确性和可靠性。
附图说明
18.图1为本发明的实施例的墙体结构孔气密性检测的方法中像素点数字化团簇选取示意图。
19.图2为本发明的实施例的墙体结构孔气密性检测的方法中数字化复杂边缘团簇选取示意图。
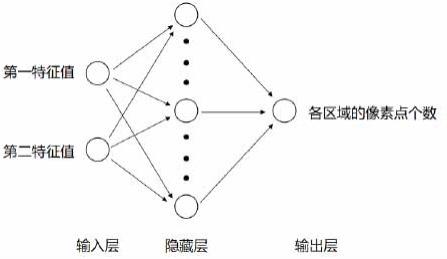
20.图3为本发明的实施例的墙体结构孔气密性检测的方法中bp神经网络结构示意图。
21.图4为本发明的实施例的墙体结构孔气密性检测的装置结构示意图。
具体实施方式
22.下面结合实施例,对本发明作进一步地详细说明,但本发明的实施方式不限于此。
23.实施例本实施例的一种墙体结构孔气密性检测的方法,包括以下步骤:s1在墙体的一侧正对孔洞密闭后的部位设置风机单元,在墙体的另一侧正对孔洞密闭后的部位设置红外成像单元;s2通过风机单元进行吹风,通过红外成像单元获得待测密闭后的结构孔的红外图像;s3墙体结构孔气密性检测的图像识别:s31如图1所示,对训练集中的红外图像中温度异常区域的任意像素点,以该像素点为起始点建立二维坐标系,转换为二维坐标系的像素点具有x和y坐标,从所述起始点以距离d为半径做圆;如果圆内的点数等于或大于设定的最小点数(本实施例最小点数设置为5),则视为一个团簇,如果相邻点的数量小于设定的最小点数,则相应点视为噪声,将之舍弃;其中,d为预设值,本实施例中,d值为沿x轴方向5个像素点横坐标之和或是沿y轴方向5个像素点纵坐标之和;
s32 对训练集中的红外图像中温度异常区域的所有像素点,重复步骤s31; s33将训练集中的红外图像划分为m个网格,m为预设值;对于第j个网格,j=1,2
…
m;采用协方差矩阵计算特征值和特征值:其中,n为第j个网格中团簇的个数;xi和yi分别为第i个团簇中的所有x坐标形成的一阶矩阵和所有y坐标形成的一阶矩阵,分别是第i个团簇中x的平均值和y的平均值;s34 计算第j个网格的第一特征值γj:s35如图2所示,对于第j个网格中的温度差异边缘区域,采用不规则多边形包含分布不规则的像素点;α是不规则多边形的面积,β是不规则多边形中团簇簇的个数;计算第j个网格的第二特征值δj:所述不规则多边形为包含所有分布不规则的像素点的面积最小的不规则多边形;s36 记录每个网格所包含的所有像素点aj;s37如图3所示,以、为输入向量,以为输出向量,输入到神经网络中进行训练,并通过验证集中的红外图像进行验证,得到墙体结构孔气密性检测的检测模型;s38获取待测的墙体的红外图像,采用步骤s37得到的墙体结构孔气密性检测的检测模型进行检测。
24.在本实施例中,步骤s33中所述将训练集中的红外图像划分为m个网格,具体为:将训练集中的红外图像划分为m
×
m个网格;其中m取值大于100。
25.在本实施例中,步骤s37所述神经网络为bp神经网络。
26.在本实施例中,所述不规则多边形为梯形。
27.如图4所示,墙体9上的结构孔5,采用结构孔填充物8密闭后,遗留有缝隙3;采用本实施例的一种墙体结构孔气密性检测的装置进行检测。装置包括风机单元7、红外成像单元和数据处理单元1。所述数据处理单元包括处理器和存储器;所述存储器上存储有非暂时性计算机指令,当所述非暂时性计算机指令被处理器运行时,执行如所述的墙体结构孔气密
性检测的图像识别方法。
28.在本实施例中,墙体结构孔气密性检测的检测装置还包括用于将风机单元固定在墙体上的连接装置6。
29.在本实施例中,所述风机单元包括壳体、安装在壳体内的风扇、安装在壳体内的电阻加热器、密封下模、密封上模及风机连接器,密封下模与密封上模相适配,且风机连接器通过夹具与风机相连接,风机通过控制单元控制。
30.在本实施例中,所述红外成像单元包括暗箱4及安装在暗箱内的红外相机2。
31.本实施例还提供了一种存储介质,用于存储非暂时性计算机指令,当所述非暂时性计算机指令被运行时,执行所述的墙体结构孔气密性检测的图像识别方法。
32.本实施例用于训练的数据集被分为 70% 的训练、15% 的验证和 15% 的测试。为了验证本实施例中提出的墙体结构孔气密性检测的检测方法,使用精确度p、召回率r和f分数三个指标来验证模型与实际结果的准确性,精准度、召回率和f分数的计算公式如下:ta表示红外成像中泄漏区域实际的像素点与模型预测的像素点数量一致的数量;fa表示红外成像中泄漏区域实际的像素点与模型预测的像素点数量不一致的数量;ff表示模型预测泄漏区域像素点完全错误的数量。
33.如表1所示,显示了本发明本实施例中提出的墙体结构孔气密性检测的检测方法应用于5幅红外图像后,通过模型预测的像素点与实际结构孔热成像图片像素点位置的比较的结果,结果显示精准度、召回率和f分数的平均值可以达到94%、91.4%和92.7%。
34.表1精确度p、召回率r和f分数指标对比表本实施例提出了一种利用图像处理和人工神经网络从热图像中检测密封后结构孔气密性的新方法,首先提出了一种基于红外热成像图片数字特征提取方法,其次提出了一种使用机器学习的检测过程。从实践的角度来看,本发明提出的方法可以通过自动检测来确保试验过程的准确性和可靠性。
35.上述实施例为本发明较佳的实施方式,但本发明的实施方式并不受所述实施例的
限制,其他的任何未背离本发明的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1