一种用于车道偏离系统中的车道线识别系统和方法与流程
1.本发明涉及一种用于车道偏离系统中的车道线识别系统和方法,属于车道线识别技术领域。
背景技术:
2.随着机动车数量的不断增加,由驾驶员误操作引发的交通安全问题日益严峻,以安全辅助驾驶系统为代表的智能汽车技术可有效减少因驾驶员操作失误导致的交通事故。
3.当然,在室外自然环境下的汽车安全驾驶预警系统中,环境光照以及视野角度变化会严重影响车道线识别。如果车道线的识别率略低以及 acc(自适应巡航)对于前方压线行驶车辆的识别率很低,就会有发生碰撞的隐患。近年来许多学者一直采用各种办法来消除这些因素的影响。比如有些学者采用直方图法来增强识别目标域值,同时采用具有修正值的各种边缘检测方法来提高边缘检测精度。这些方法能在较稳定光照环境下提高识别精度,减少了背景噪声。但是没有根本解决实际动态变化自然光照对车道线识别的影响。比如光线强弱变化,以及视野角度改变都会影响识别精度。另外一些学者通过采用改变摄像机物理属性来提高识别精度,比如采用红外摄像机替换普通摄像机。这种方法虽然可以直接消除环境光照影响,但造价较高,还无法推广到当今的汽车安全驾驶辅助系统中。
技术实现要素:
4.本发明要解决的技术问题是:提供一种用于车道偏离系统中的车道线识别系统和方法,以解决现有技术中存在的技术问题。
5.本发明采取的技术方案为:一种用于车道偏离系统中的车道线识别系统,包括特征图像提取模块,对相机捕获到的视频图像进行车道线特征图像提取;特征点提取与跟踪模块,对特征图像提取模块得到的图像进行特征点的提取,获取相对可靠的特征点位置后,使用卡尔曼滤波器对特征点进行跟踪;并获取图像坐标系下车道中心线方程;车道中心线方程拟合计算模块,通过两侧跟踪到的特征点计算车道中心线特征点,拟合出图像坐标下车道中心线方程,然后通过标定获得逆透视图像与实际道路之间的横纵向坐标比例关系,利用特征点提取与跟踪模块所得图像坐标系下车道中心线方程与此比例关系进行实际车道中心线方程的计算。
6.一种用于车道偏离系统中的车道线识别方法,该方法为:在进行车道偏离预警之前,先进行车道线识别并估计车道中心线方程;具体步骤如下:一、在图像预处理阶段,对图像进行畸变校正,再对校正后的图像进行逆透视变换(ipm)获取车前方道路的俯视图,并对ipm图像进行双边滤波消除图像噪声;二、使用 sobel 算子对ipm图像进行边缘检测,并基于车道线宽度模型与边缘检测图像进行车道线特征图像的提取,消除非车道线信息的干扰;然后,在得到车道线特征图像后搜索并提取车道线特征点,并使用最小二乘法对特征点进行拟合,获取车道线方程;
三、为提高车道特征点的提取精度,采用卡尔曼滤波器对车道线特征点进行跟踪,建立前后帧之间特征点的联系,同时使用获取的车道线方程建立动态感兴趣区域用于后续图像的检测;最后根据卡尔曼滤波器跟踪到的车道线特征点计算出车道中心线特征点并进行拟合,获取像素坐标下车道中心线方程;四、在得到像素坐标下车道中心线方程后,确定逆透视图像与实际道路坐标空间之间的比例关系,计算实际道路坐标下车前道路中心线方程、曲率半径等信息、同时分析车道偏离预警模型,制定偏离预警决策算法,设置预警触发条件。
7.步骤一中先进行图像的灰度化,再对图像进行逆透视变换。
8.步骤二中车道特征图像提取方法为:设g(x,y)为边缘检测图像的梯度值,t为梯度阈值,l为车道线宽度;当某点梯度g (x,y)大于阈值 t且与其水平相隔距离 l处的像素点 g(x+l,y)的梯度值也大于阈值 t,则此处为可能的车道线边缘点,将这两点间的像素值全部置为255,不符合条件的像素点像素值置为 0,至此即完成从 sobel 边缘检测图像到车道特征图像的提取。
9.本发明的有益效果:与现有技术相比,本发明基于机器视觉的车道线识别方法,能够实时进行车道线识别并计算车道中心线方程,当车辆偏离当前车道或有偏离当前车道趋势的时候能够发出预警信号,减少由于驾驶员疲劳驾驶或注意力分散引发的交通事故,提高行车安全性。
附图说明
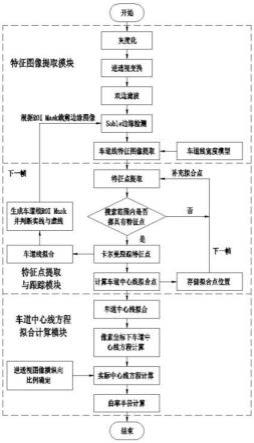
10.图1为车道线识别算法逻辑框图;图2为车道检测及偏离预警系统预警流程示意图;图3为特征图像提取流程图;图4为车道特征图像提取方法流程图。
具体实施方式
11.下面结合附图及具体的实施例对本发明进行进一步介绍。
12.实施例1:如图1-图4所示,一种用于车道偏离系统中的车道线识别系统,包括特征图像提取模块,对相机捕获到的视频图像进行车道线特征图像提取;包括对图像进行灰度化,再对图像进行逆透视变换(ipm)获取俯视图图像,接着使用 sobel 算子对图像进行边缘检测,最后使用车道线宽度模型对边缘检测图像进行车道线特征图像的提取;特征点提取与跟踪模块,对特征图像提取模块得到的图像进行特征点的提取,获取相对可靠的特征点位置后,使用卡尔曼滤波器对特征点进行跟踪;并使用最小二乘法对特征点进行拟合,获取曲线车道线方程,绘制出车道线。为进一步提高车道线识别精度与速度,利用所得两侧车道线建立动态感兴趣区域,对后帧图像检测范围进行限制,提高检测精度;利用两侧感兴趣区域对左右车道进行分割,通过统计投影点数区分实线与虚线车道;车道中心线方程拟合计算模块,通过两侧跟踪到的特征点计算车道中心线特征点,拟合出图像坐标下车道中心线方程,然后通过标定获得逆透视图像与实际道路之间的横纵向坐标比例关系,利用特征点提取与跟踪模块所得图像坐标系下车道中心线方程与此
比例关系进行实际车道中心线方程的计算。
13.特征图像提取模块是车道线检测与车道偏离预警算法实现的前提。这一模块包括图像预处理与逆透视车道线特征图像提取。图像预处理目的在于降低图像中噪声的干扰,减少计算时间,提高算法的鲁棒性与实时性。系统从安装于汽车前部的摄像头中获取车前方道路的视频图像信息,在未进行任何处理的图像中,存在着大量的干扰,包括阳光照射路旁行道树造成的阴影干扰、路面反光、落叶遮挡、车辆干扰、路面非车道线标志干扰、车道线缺失干扰等。系统需要从这些干扰中将车道线信息凸显出来。为达到凸显车道线信息并降低干扰的目的,需应用图像预处理技术,包括图像灰度化、图像平滑处理、阈值操作、边缘检测等算图像预处理算法。
14.灰度化是实现三通道彩色图像到单通道灰度图像的转化步骤,这一步的作用在于降低图像处理的复杂度,提高图像处理速度。
15.图像平滑处理又可称为模糊处理,是用来对图像进行降噪和减少失真的方法。
16.使用阈值操作来进行车道线信息提取,阈值操作是先设定一个阈值,将图像中像素点灰度与此阈值进行比较,大于此阈值则被认为是目标点,小于阈值的像素点则会被滤除,其进一步降低了图像中的信息复杂度,使得图像中信息只有两个值,降低了图像处理的数据量,突出了目标信息。
17.边缘检测是通过检测图像中边缘信息来凸显检测目标的方法,本发明采用的边缘检测算法为sobel边缘检测。
18.因视觉相机成本相对较低,基于视觉的车道偏离预警系统是目前主流的车道偏离预警形式,系统可通过单目或双目相机获取前方道路的图像信息,再使用算法程序对图像进行处理,识别出车道线,并判断车辆当前位置及是否有偏离车道的危险,最后根据判断结果向驾驶员反馈信息,本发明提出的一种用于车道偏离系统中的车道线识别方法流程如图2所示。
19.实施例2:如图1所示,一种用于车道偏离系统中的车道线识别方法,该方法为:在进行车道偏离预警之前,先进行车道线识别并估计车道中心线方程;具体步骤如下:一、在图像预处理阶段,对图像进行畸变校正,再对校正后的图像进行逆透视变换(ipm)获取车前方道路的俯视图,并对ipm图像进行双边滤波消除图像噪声;二、使用 sobel 算子对ipm图像进行边缘检测,并基于车道线宽度模型与边缘检测图像进行车道线特征图像的提取,消除非车道线信息的干扰;然后,在得到车道线特征图像后搜索并提取车道线特征点,并使用最小二乘法对特征点进行拟合,获取车道线方程;三、为提高车道特征点的提取精度,采用卡尔曼滤波器对车道线特征点进行跟踪,建立前后帧之间特征点的联系,同时使用获取的车道线方程建立动态感兴趣区域用于后续图像的检测;最后根据卡尔曼滤波器跟踪到的车道线特征点计算出车道中心线特征点并进行拟合,获取像素坐标下车道中心线方程;四、在得到像素坐标下车道中心线方程后,确定逆透视图像与实际道路坐标空间之间的比例关系,计算实际道路坐标下车前道路中心线方程、曲率半径等信息、同时分析车道偏离预警模型,制定偏离预警决策算法,设置预警触发条件。
20.图3所示为本发明车道线特征图像提取流程。直接从原图像中检测车道线,由于视觉存在着透视效果,从而导致检测出来的车道线并不能反映实际的道路线形,为了能够准
确的从图像中检测到车道线,且检测到的车道线能够准确的反映道路的线形,本发明选择先进行图像的灰度化,再对图像进行逆透视变换以获取俯视图,最后对俯视图使用sobel算子进行边缘检测。边缘检测后的图像中车道线信息相对明显,但依然会存在着多种干扰,因此在边缘检测基础上提出逆透视边缘检测图像与车道线宽度特性相结合的车道线特征图像的提取方法,提取车道线特征图像。
21.图4为本发明车道特征图像提取方法,车道特征图像提取方法为:设g(x,y)为边缘检测图像的梯度值,t为梯度阈值,l为车道线宽度;当某点梯度g (x,y)大于阈值 t且与其水平相隔距离 l处的像素点 g(x+l,y)的梯度值也大于阈值 t,则此处为可能的车道线边缘点,将这两点间的像素值全部置为255,不符合条件的像素点像素值置为 0,至此即完成从 sobel 边缘检测图像到车道特征图像的提取。
22.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内,因此,本发明的保护范围应以所述权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1