一种基于人工智能的渡口船舶人流车流统计方法及系统与流程
1.本发明涉及渡口船舶技术领域,特别涉及一种基于人工智能的渡口船舶人流车流统计方法及系统。
背景技术:
2.渡口船舶载客量统计一直都是海事部门、船东重点关心的问题,一般情况下,很多渡口都没有售票的,所以载客量传统都是靠人工统计,也就是说,现有技术在渡口人流车流统计中,都是依靠纯人工统计,无法保障准确率,也无法对结果进行核查,人工成本高,且工作效率低。
技术实现要素:
3.本发明主要解决的技术问题是提供一种基于人工智能的渡口船舶人流车流统计方法及系统,能够实现自动统计登上船舶的人流及车流,更精准,且人工成本低,工作效率高。
4.为解决上述技术问题,本发明采用的一个技术方案是:提供一种基于人工智能的渡口船舶人流车流统计方法,其特征在于,该方法包括:实时检测是否有新的船舶停泊在码头渡口;在检测到有新的船舶停泊在码头渡口时,识别出该船舶的船舶信息,其中船舶信息包括船舶名称、船舶id码和船舶所停泊的位置信息;生成该船舶的所对应的航次数据,其中航次数据包括船舶信息、航次序号、船舶到达时间以及船舶出发时间;根据船舶所停泊的位置信息来启动最接近该船舶的摄像头,并调节摄像头的拍摄角度,以使得摄像头的镜头朝向船舶;选取跟踪目标,并记录在预设跟踪区域内的跟踪目标的移动轨迹,其中跟踪目标包括人、宠物、货物及车;根据移动轨迹来统计登上该船舶的人、宠物、货物及车;获取登上该船舶的目标总数量,并上传目标总数量以及航次数据,其中目标总数量包括人总数量、宠物总数量、货物总数量及车总数量。
5.进一步的,所述实时检测是否有新的船舶停泊在码头渡口的步骤包括:判断该船舶是否靠近渡口方向行驶;如果确定该船舶朝靠近渡口方向行驶,判定该船舶为新的船舶;识别出船舶的框架区域以及码头渡口的停靠区域;判断框架区域与停靠区域的最短距离是否小于预设距离、判断框架区域与停靠区域是否存在交叉或者判断框架区域与停靠区域的重叠区域是否大于预设值;如果是,则判定有新的船舶停泊在码头渡口。
6.进一步的,所述根据船舶所停泊的位置信息来启动最接近该船舶的摄像头,并调节摄像头的拍摄角度,以使得摄像头的镜头朝向船舶的步骤包括:获取船舶的定位信息以及获取码头渡口上所有的摄像头的定位信息;根据船舶的定位信息及所有的摄像头的定位信息选取出距离该船舶最近的摄像头;调节摄像头的高度,并同时调节摄像头的镜头的拍摄角度,以使得该摄像头能够拍摄到预设监控区域,其中停靠区域和预设跟踪区域属于预设监控区域内。
7.进一步的,所述选取跟踪目标,并记录在预设跟踪区域内的跟踪目标的移动轨迹
的步骤包括:从摄像头所拍摄的视频中解析出在预设跟踪区域内所有的物体,并从物体中解析出人、宠物、货物及车,且对所解析出的人、宠物、货物及车进行打标识,从而选取出跟踪目标;实时记录对打标识的人、宠物、货物及车的多个位置,并将预设时间内的多个位置进行连线以形成移动轨迹。
8.进一步的,所述根据移动轨迹来统计登上该船舶的人、宠物、货物及车的步骤包括:识别出船舶内的行走区域;判断移动轨迹内是否存在从码头渡口的停靠区域移动至船舶的行走区域的行为;如果是,确定该移动轨迹所对应的跟踪目标登上该船舶,并进行登船统计。
9.为解决上述技术问题,本发明采用的另一个技术方案是:提供一种基于人工智能的渡口船舶人流车流统计系统,其特征在于,该系统包括:船舶检测模块,用于实时检测是否有新的船舶停泊在码头渡口;船舶信息获取模块,用于在船舶检测模块检测到有新的船舶停泊在码头渡口时,识别出该船舶的船舶信息,其中船舶信息包括船舶名称、船舶id码和船舶所停泊的位置信息;航次生产模块,用于生成该船舶的所对应的航次数据,其中航次数据包括船舶信息、航次序号、船舶到达时间以及船舶出发时间;摄像头控制模块,用于根据船舶所停泊的位置信息来启动最接近该船舶的摄像头,并调节摄像头的拍摄角度,以使得摄像头的镜头朝向船舶;目标识别模块,用于选取跟踪目标,其中跟踪目标包括人、宠物、货物及车;记录模块,用于记录在预设跟踪区域内的跟踪目标的移动轨迹;统计模块,用于根据移动轨迹来统计登上该船舶的人、宠物、货物及车;上传模块,用于获取登上该船舶的目标总数量,并上传目标总数量以及航次数据,其中目标总数量包括人总数量、宠物总数量、货物总数量及车总数量。
10.进一步的,所述船舶检测模块包括:船舶行驶判断单元,用于判断该船舶是否朝靠近渡口方向行驶;新船确定单元,用于在确定该船舶朝靠近渡口方向行驶,判定该船舶为新的船舶;船舶区域识别单元,用于识别出船舶的框架区域;渡口区域识别单元,用于识别码头渡口的停靠区域;区域判断单元,用于判断框架区域与停靠区域的最短距离是否小于预设距离、判断框架区域与停靠区域是否存在交叉或者判断框架区域与停靠区域的重叠区域是否大于预设值;船舶停靠单元,用于在确定框架区域与停靠区域的最短距离小于预设距离、确定框架区域与停靠区域存在交叉或者确定框架区域与停靠区域的重叠区域大于预设值时,判定有新的船舶停泊在码头渡口。
11.进一步的,所述摄像头控制模块包括:船舶定位单元,用于获取船舶的定位信息;摄像头定位单元,用于获取码头渡口上所有的摄像头的定位信息;摄像头选取单元,用于根据船舶的定位信息及所有的摄像头的定位信息选取出距离该船舶最近的摄像头;摄像头调节单元,用于调节摄像头的高度,并同时调节摄像头的镜头的拍摄角度,以使得该摄像头能够拍摄到预设监控区域,其中停靠区域和预设跟踪区域属于预设监控区域内。
12.进一步的,所述目标识别模块用于从摄像头所拍摄的视频中解析出在预设跟踪区域内所有的物体,并从物体中解析出人、宠物、货物及车,且对所解析出的人、宠物、货物及车进行打标识,从而选取出跟踪目标;所述记录模块用于实时记录对打标识的人、宠物、货物及车的多个位置,并将预设时间内的多个位置进行连线以形成移动轨迹。
13.进一步的,所述统计模块包括:船舶行走区域识别单元,用于识别出船舶内的行走区域;行为判断单元,用于判断移动轨迹内是否存在从码头渡口的停靠区域移动至船舶的
行走区域的行为;统计单元,用于在确定该移动轨迹所对应的跟踪目标登上该船舶,并进行登船统计。
14.本发明的有益效果是:区别于现有技术的情况,本发明所公开的基于人工智能的渡口船舶人流车流统计方法及系统具有以下优点:
15.1、能够对人、宠物、货物及车等多目标进行识别,可以实现不同目标进行统计,精准度高;
16.2、采用码头渡口上的摄像头进行识别人、宠物、货物及车,能够多区域进行识别,达到无死角的监控效果;
17.3、能够对船舶进行识别并生成航次,能够清楚知道每一艘船舶的人流及车流信息,能够识别到是哪一艘船停靠,并针对此艘船生成航次,按航次统计,获得更具针对性及更精准的统计结果。
附图说明
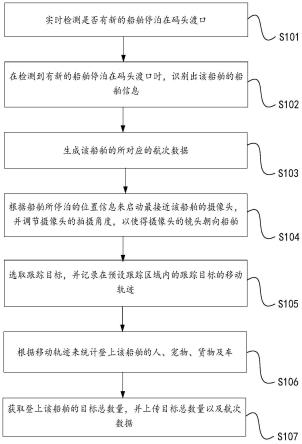
18.图1是本发明基于人工智能的渡口船舶人流车流统计方法的流程示意图;
19.图2是本发明基于人工智能的渡口船舶人流车流统计系统的结构示意图;
20.图3是图2中船舶检测模块的子结构示意图;
21.图4是图2中摄像头控制模块的子结构示意图。
具体实施方式
22.请参阅图1,本发明所公开的基于人工智能的渡口船舶人流车流统计方法包括以下步骤:
23.步骤s101:实时检测是否有新的船舶停泊在码头渡口。
24.优选地,步骤s101中实时检测是否有新的船舶停泊在码头渡口的步骤包括:
25.步骤s1011:判断该船舶是否朝靠近渡口方向行驶。
26.应理解,判断该船舶是否朝靠近渡口方向行驶的步骤包括:选取码头渡口作为参考点,间隔时间段获取船舶与参考点的距离,如果确定船舶与参考点的距离是越来短,说明船舶是朝码头渡口方向移动,因此可以判断该船舶朝靠近码头的渡口方向行驶的。
27.如果确定该船舶朝靠近渡口方向行驶,执行步骤s1012:判定该船舶为新的船舶。应理解,当确定该船舶不是朝靠近渡口方向行驶,如停留在海面上或者朝远离码头渡口的方向行驶,则不执行步骤s1012。
28.步骤s1013:识别出船舶的框架区域以及码头渡口的停靠区域。应理解,在判定出该船舶为新的船舶,才执行步骤s1013。
29.应理解,在步骤s1013中,船舶的框架区域是指船舶所占空间区域,即正投影在地面上的区域,而码头渡口上间隔设置有多个停靠区域,每个停靠区域都设置有标识点,可通过标识点识别出码头渡口的停靠区域。
30.步骤s1014:判断框架区域与停靠区域的最短距离是否小于预设距离、判断框架区域与停靠区域是否存在交叉或者判断框架区域与停靠区域的重叠区域是否大于预设值。
31.如果确定框架区域与停靠区域的最短距离小于预设距离、确定框架区域与停靠区域是否存在交叉或者确定框架区域与停靠区域的重叠区域大于预设值时,执行步骤s1015:
判定有新的船舶停泊在码头渡口。
32.应理解,预设距离为人为预定值,而预设距离优选小于0.5米,如果确定框架区域与停靠区域的最短距离小于0.5米,或者确定框架区域与停靠区域是否存在交叉,又或者确定框架区域与停靠区域的重叠区域大于1-5平方米时,说明框架区域与停靠区域两者靠的很近,可以判定为船舶停靠在码头渡口。
33.步骤s102:在检测到有新的船舶停泊在码头渡口时,识别出该船舶的船舶信息。
34.优选地,船舶信息包括船舶名称、船舶id码和船舶所停泊的位置信息。
35.步骤s103:生成该船舶的所对应的航次数据。
36.优选地,航次数据包括船舶信息、航次序号、船舶到达时间以及船舶出发时间。
37.步骤s104:根据船舶所停泊的位置信息来启动最接近该船舶的摄像头,并调节摄像头的拍摄角度,以使得摄像头的镜头朝向船舶。
38.优选地,步骤s104中根据船舶所停泊的位置信息来启动最接近该船舶的摄像头,并调节摄像头的拍摄角度,以使得摄像头的镜头朝向船舶的步骤包括:
39.步骤s1041:获取船舶的定位信息以及获取码头渡口上所有的摄像头的定位信息。应理解,码头渡口上间隔设置有多个摄像头,每个摄像头可升降设置,每个摄像头都可以转动设置。
40.步骤s1042:根据船舶的定位信息及所有的摄像头的定位信息选取出距离该船舶最近的摄像头。
41.步骤s1043:调节摄像头的高度,并同时调节摄像头的镜头的拍摄角度,以使得该摄像头能够拍摄到预设监控区域。
42.优选地,停靠区域和预设跟踪区域属于预设监控区域内。
43.步骤s105:选取跟踪目标,并记录在预设跟踪区域内的跟踪目标的移动轨迹。
44.优选地,跟踪目标包括人、宠物、货物及车。
45.进一步的,步骤s105中选取跟踪目标,并记录在预设跟踪区域内的跟踪目标的移动轨迹的步骤包括:
46.步骤s1051:从摄像头所拍摄的视频中解析出在预设跟踪区域内所有的物体,并从物体中解析出人、宠物、货物及车,且对所解析出的人、宠物、货物及车进行打标识,从而选取出跟踪目标。
47.步骤s1052:实时记录对打标识的人、宠物、货物及车的多个位置,并将预设时间内的多个位置进行连线以形成移动轨迹。应理解,预设时间可以是一分钟内、五分钟内、10分钟内等,即将一分钟内的跟踪目标的位置连成一条轨迹线。
48.值得注意的是,由于工作人员也会存在走动现象,因此在一些实施中,在从物体中解析出人时,还进一步识别该人是工作人员还是客户人员,当识别出是工作人员时,不对该人进行打标识,当识别出是客户人员时才对该人进行打标识。进一步的,工作人员佩戴有id识别牌,当识别到该人佩戴有id识别牌时,视为该人为工作人员,当识别到该人没有佩戴有id识别牌时,视为该人为客户人员。
49.步骤s106:根据移动轨迹来统计登上该船舶的人、宠物、货物及车。
50.优选地,步骤s106中根据移动轨迹来统计登上该船舶的人、宠物、货物及车的步骤包括:
51.步骤s1061:识别出船舶内的行走区域。应理解,行走区域是属于船舶内的区域,优选地,该行走区域为靠近船舶门口的进出区域。
52.应理解,在一些实施例中,船舶内的行走区域为一红色区域,只要找出船舶内的红色区域即可识别出行走区域,而停靠区域为一蓝色区域,只要找出码头渡口上的蓝色区域即可识别出为船舶的停靠区域。
53.步骤s1062:判断移动轨迹内是否存在从码头渡口的停靠区域移动至船舶的行走区域的行为。
54.也就是说,在步骤s1062中,判断移动轨迹中的位置是否存在从码头渡口的停靠区域移动至船舶的行走区域的位置,如果移动轨迹中的位置存在从码头渡口的停靠区域移动至船舶的行走区域的位置,则说明从码头渡口登上船舶了。
55.进一步的,判断移动轨迹中的位置是否存在从码头渡口的停靠区域移动至船舶的行走区域的位置主要看移动轨迹中的位置是否存在从蓝色区域移动至红色区域,并保持在红色区域内不离开红色区域,则说明从码头渡口登上船舶了。
56.如果确定移动轨迹内存在从码头渡口的停靠区域移动至船舶的行走区域的行为,则执行步骤s1063:确定该移动轨迹所对应的跟踪目标登上该船舶,并进行登船统计。
57.进一步的,如果确定移动轨迹内不存在从码头渡口的停靠区域移动至船舶的行走区域的行为,则说明不存在登录船舶的行为。
58.步骤s107:获取登上该船舶的目标总数量,并上传目标总数量以及航次数据。
59.优选地,目标总数量包括人总数量、宠物总数量、货物总数量及车总数量。
60.应理解,在步骤s107中,将目标总数量以及航次数据上传至后台服务器,可以进行针对性统计。
61.进一步的,在一些实施例中,该基于人工智能的渡口船舶人流车流统计方法还包括:识别出宠物时,无论是在停靠区域还是在船舶的行走区域,实时跟踪该宠物的移动轨迹,并判断该宠物是否存在不文明现象,如果存在不文明现象,则报警。应理解,宠物的不文明现象包括宠物随地大小便。
62.进一步的,在一些实施例中,该基于人工智能的渡口船舶人流车流统计方法还包括:识别出客户人员时,无论是在停靠区域还是在船舶的行走区域,实时跟踪该客户人员的移动轨迹,并判断该宠物是否存在不文明行为,如果存在不文明行为,则报警。应理解,该客户人员的不文明现象包括客户人员攀爬等危险行为。
63.通过上述方式,本发明所公开的基于人工智能的渡口船舶人流车流统计方法能够对人、宠物、货物及车等多目标进行识别,可以实现不同目标进行统计,精准度高;本发明采用码头渡口上的摄像头进行识别人、宠物、货物及车,能够多区域进行识别,达到无死角的监控效果;另外,本发明能够对船舶进行识别并生成航次,能够清楚知道每一艘船舶的人流及车流信息,能够识别到是哪一艘船停靠,并针对此艘船生成航次,按航次统计,获得更具针对性及更精准的统计结果。
64.请参阅图2,本发明所公开的基于人工智能的渡口船舶人流车流统计系统包括船舶检测模块10、船舶信息获取模块11、航次生产模块12、摄像头控制模块13、目标识别模块14、记录模块15、统计模块16和上传模块17。
65.船舶检测模块10用于实时检测是否有新的船舶停泊在码头渡口。
66.在本实施例中,如图3所示,船舶检测模块10包括船舶行驶判断单元101、新船确定单元102、船舶区域识别单元103、渡口区域识别单元104、区域判断单元105和船舶停靠单元106。
67.船舶行驶判断单元101用于判断该船舶是否朝靠近渡口方向行驶。应理解,船舶行驶判断单元101判断该船舶是否朝靠近渡口方向行驶的具体包括:选取码头渡口作为参考点,间隔时间段获取船舶与参考点的距离,如果确定船舶与参考点的距离是越来短,说明船舶是朝码头渡口方向移动,因此可以判断该船舶是朝靠近渡口方向行驶的。
68.新船确定单元102用于在确定该船舶从海上朝向码头渡口方向行驶,判定该船舶为新的船舶。应理解,当确定该船舶不是朝靠近渡口方向行驶,如停留在海面上或者朝远离码头渡口的方向行驶,判断该船舶不是新船舶。
69.船舶区域识别单元103用于识别出船舶的框架区域。应理解,船舶的框架区域是指船舶所占空间区域,即正投影在地面上的区域。
70.渡口区域识别单元104用于识别码头渡口的停靠区域。应理解,码头渡口上间隔设置有多个停靠区域,每个停靠区域都设置有标识点,可通过标识点识别出码头渡口的停靠区域。
71.区域判断单元105用于判断框架区域与停靠区域的最短距离是否小于预设距离、判断框架区域与停靠区域是否存在交叉或者判断框架区域与停靠区域的重叠区域是否大于预设值。
72.船舶停靠单元106用于在确定框架区域与停靠区域的最短距离小于预设距离、确定框架区域与停靠区域存在交叉或者确定框架区域与停靠区域的重叠区域大于预设值时,判定有新的船舶停泊在码头渡口。
73.应理解,预设距离为人为预定值,而预设距离优选小于0.5米,如果确定框架区域与停靠区域的最短距离小于0.5米,或者确定框架区域与停靠区域是否存在交叉,说明框架区域与停靠区域两者靠的很近,可以判定为船舶停靠在码头渡口。
74.船舶信息获取模块11用于在船舶检测模块10检测到有新的船舶停泊在码头渡口时,识别出该船舶的船舶信息。
75.优选地,船舶信息包括船舶名称、船舶id码和船舶所停泊的位置信息。
76.航次生产模块12用于生成该船舶的所对应的航次数据。
77.优选地,航次数据包括船舶信息、航次序号、船舶到达时间以及船舶出发时间。
78.摄像头控制模块13用于根据船舶所停泊的位置信息来启动最接近该船舶的摄像头,并调节摄像头的拍摄角度,以使得摄像头的镜头朝向船舶。
79.在本实施例中,如图4所示,摄像头控制模块13包括船舶定位单元131、摄像头定位单元132、摄像头选取单元133和摄像头调节单元134。
80.船舶定位单元131用于获取船舶的定位信息。应理解,船舶带有定位功能,因此能够将定位的信息发送给后台服务器。
81.摄像头定位单元132用于获取码头渡口上所有的摄像头的定位信息。应理解,码头渡口上间隔设置有多个摄像头,每个摄像头可升降设置,每个摄像头都可以转动设置。
82.摄像头选取单元133用于根据船舶的定位信息及所有的摄像头的定位信息选取出距离该船舶最近的摄像头。
83.摄像头调节单元134用于调节摄像头的高度,并同时调节摄像头的镜头的拍摄角度,以使得该摄像头能够拍摄到预设监控区域。
84.优选地,停靠区域和预设跟踪区域属于预设监控区域内。
85.目标识别模块14用于选取跟踪目标,其中跟踪目标包括人、宠物、货物及车。
86.在本实施例中,目标识别模块14用于从摄像头所拍摄的视频中解析出在预设跟踪区域内所有的物体,并从物体中解析出人、宠物、货物及车,且对所解析出的人、宠物、货物及车进行打标识,从而选取出跟踪目标。
87.值得注意的是,由于工作人员也会存在走动现象,因此在一些实施中,目标识别模块14在从物体中解析出人时,还进一步识别该人是工作人员还是客户人员,当识别出是工作人员时,不对该人进行打标识,当识别出是客户人员时才对该人进行打标识。进一步的,工作人员佩戴有id识别牌,当识别到该人佩戴有id识别牌时,视为该人为工作人员,当识别到该人没有佩戴有id识别牌时,视为该人为客户人员。
88.记录模块15用于记录在预设跟踪区域内的跟踪目标的移动轨迹。
89.在本实施例中,记录模块15用于实时记录对打标识的人、宠物、货物及车的多个位置,并将预设时间内的多个位置进行连线以形成移动轨迹。应理解,预设时间可以是一分钟内、五分钟内、10分钟内等,即将一分钟内的跟踪目标的位置连成一条轨迹线。
90.统计模块16用于根据移动轨迹来统计登上该船舶的人、宠物、货物及车。
91.在本实施例中,统计模块16包括船舶行走区域识别单元161、行为判断单元162和统计单元163。
92.船舶行走区域识别单元161用于识别出船舶内的行走区域。应理解,行走区域是属于船舶内的区域,优选地,该行走区域为靠近船舶门口的进出区域。
93.应理解,在一些实施例中,船舶内的行走区域为一红色区域,只要找出船舶内的红色区域即可识别出行走区域。
94.行为判断单元162用于判断移动轨迹内是否存在从码头渡口的停靠区域移动至船舶的行走区域的行为。
95.也就是说,行为判断单元162判断移动轨迹中的位置是否存在从码头渡口的停靠区域移动至船舶的行走区域的位置,如果移动轨迹中的位置存在从码头渡口的停靠区域移动至船舶的行走区域的位置,则说明从码头渡口登上船舶了。
96.统计单元163用于在确定该移动轨迹所对应的跟踪目标登上该船舶,并进行登船统计。
97.上传模块17用于获取登上该船舶的目标总数量,并上传目标总数量以及航次数据。
98.优选地,目标总数量包括人总数量、宠物总数量、货物总数量及车总数量。
99.应理解,上传模块17将目标总数量以及航次数据上传至后台服务器,可以进行针对性统计。
100.进一步的,在一些实施例中,该基于人工智能的渡口船舶人流车流统计系统还包括宠物监控模块,用于识别出宠物时,无论是在停靠区域还是在船舶的行走区域,实时跟踪该宠物的移动轨迹,并判断该宠物是否存在不文明现象,如果存在不文明现象,则报警。应理解,宠物的不文明现象包括宠物随地大小便。
101.进一步的,在一些实施例中,该基于人工智能的渡口船舶人流车流统计系统还包括人员监控模块,用于识别出客户人员时,无论是在停靠区域还是在船舶的行走区域,实时跟踪该客户人员的移动轨迹,并判断该宠物是否存在不文明行为,如果存在不文明行为,则报警。应理解,该客户人员的不文明现象包括客户人员攀爬等危险行为。
102.通过上述方式,本发明所公开的基于人工智能的渡口船舶人流车流统计方法能够对人、宠物、货物及车等多目标进行识别,可以实现不同目标进行统计,精准度高;本发明采用码头渡口上的摄像头进行识别人、宠物、货物及车,能够多区域进行识别,达到无死角的监控效果;另外,本发明能够对船舶进行识别并生成航次,能够清楚知道每一艘船舶的人流及车流信息,能够识别到是哪一艘船停靠,并针对此艘船生成航次,按航次统计,获得更具针对性及更精准的统计结果。
103.以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1