顾及空间关系的接触网支撑设施激光点云全自动提取方法
1.本发明涉及接触网检测领域,具体涉及一种顾及空间关系的接触网支撑设施激光点云全自动提取方法。
背景技术:
2.接触网(overhead catenary system,ocs)是指通过集电装置向电力牵引单元提供电能的机电系统。一般由支柱与支柱基础、支撑设施、定位装置、接触悬挂及供电辅助设施等五部分组成,是电气化铁路的核心部分。受到风、雨、雪、沙尘等恶劣自然天气的影响,接触网会出现支撑结构松动、老化以及几何位置变化等现象,可能导致支撑设施发生变形甚至断线,严重影响铁路运营安全。为应对铁路里程的快速增长带来的重大挑战,设计接触网的常态化高效检测方法将在保障铁路运输安全、提高运输效率、降低运输能耗等方面发挥重要作用。
3.目前,支撑设施数据采集方法主要有接触式与非接触式两种,前者通过在受电弓滑板上安装感应传感器,实现支撑设施数据的动态采集。但该方法存在电磁干扰严重、维护不便等缺陷,难以满足现铁路检修工作需求。后者基于2d图像或激光点云获取测量数据。其中,2d图像可提供丰富的目标数据,但受限于光照条件难以保证数据质量,而激光点云能高效精准地获取丰富的铁路场景空间数据,且近年来车载移动激光扫描系统(mobile laser scanning,mls)快速发展。但是,获取的lidar数据包含了接触网、轨道等众多目标信息。因此,探索基于3d lidar的支撑设施自动提取方法,实现精准地支撑设施点云提取,将对铁路设施的精准分割与几何参数检测具有重要意义。
4.支撑设施提取方法依据其机理大致可分为滤波法、几何特征法、分割法三类。刘文强等人(基于摄像机标定与卡尔曼滤波的接触网几何参数检测值修正[j].铁道学报.2014,36(09):28-33.)提出卡尔曼滤波对铁路场景原始图像进行滤波处理,陈国翠等人(融合phog和bow-surf特征的接触网绝缘子缺陷检测方法[j].小型微型计算机系统.2021,42(01):172-177)采用改进的快速导向滤波算法对接触网绝缘子原始图像进行滤波几何特征法利用同一类物体具有共同的几何特征进行分类与提取;郭保青等人(铁路场景三维点云分割与分类识别算法[j].仪器仪表学报.2017(09):2103-2111)依据几何特征法提出一种基于法线方向一致性的区域生长提取算法,通过计算比较种子点与邻域点法线方向夹角的大小,完成包含接触网支柱等铁路场景地物的提取;lamas et al(li xiangtai,li xia,zhang li,et al.improving semantic segmentation via decoupled body and edg supervision[m].2020(11):435-452.)提出了一种基于启发式的复杂铁路环境语义分割工作流程,通过90公里长的铁路数据集验证了该方法的有效性。然而,由于铁路场景具有点云数据量大、场景地物复杂等特点,上述方法均无法快速有效的针对原始点云数据中的支撑设施进行提取。近些年,深度学习也被应用到点云数据语义分割提取支撑设施中,然而,这类方法均基于2d lidar数据实现接触网语义分割,实现过程较为复杂,精度相对偏低。
技术实现要素:
[0005]
为解决现有技术中存在的问题,本发明提出顾及支柱中心点、关键轨迹点以及支撑设施搜索层之间空间关系的支撑设施全自动提取算法,利用支柱中心点、关键轨迹点与支撑设施搜索层之间的空间关系,快速定位支撑设施点云区域,并联合柱体滤波与参数化投影等点云滤波算法,通过充分结合两者的优势,实现支撑设施的初提取与结果优化,大幅度提高提取精度,更好地适用复杂的支撑设施类型。
[0006]
为此,本发明采用以下技术方案:
[0007]
一种顾及空间关系的支撑设施全自动提取方法,包括以下步骤:
[0008]
s1、通过对gnss轨迹点抽稀处理获取关键轨迹点,并依此对原始点云数据进行分层、分块处理,实现对原始点云数据中支柱区域与支撑设施区域的划分;
[0009]
s2、通过邻域搜索获取支柱中心点,并依据其与所述关键轨迹点和支撑设施搜索层的空间关系构建空间索引;
[0010]
s3、以所述空间索引为驱动,实现支撑设施的初提取,获取含有接触线的支撑设施,并引入柱状搜索、参数化投影滤波的方式滤除接触线点云,实现提取结果的优化。
[0011]
其中,步骤s1中所述的对原始点云数据进行分层、分块处理的步骤如下:
[0012]
1)对gnss轨迹点进行抽稀处理:将m个gnss轨迹点划分为距离为n的若干段,每经过距离为n的一段后,以该段中心点作为关键轨迹点,其中不足n/2的距离段忽略不计,分段计算公式如下:
[0013][0014]
式中:
[0015]
f(p
(i,i+n)
):第i~i+n个关键点处的抽稀公式;
[0016]
pi:第i个轨迹点坐标值;
[0017]
2)原始点云分层分块处理:基于所述关键轨迹点分别构建一系列长、宽、高分别为2δx、2δy、z
2-z1,2δx、2δy、z
4-z3的支柱裁剪区域v1和支撑设施裁剪区域v2,经旋转矩阵matrix对其进行仿射变换后再对原始点云数据进行裁剪,实现对原始点云数据分层和空间分块,相关公式如下:
[0018][0019]
式中:
[0020]v0
:其他无关区域;
[0021]
xi,yi,zi:pi点坐标;
[0022]
步骤s2包括以下子步骤:
[0023]
1)通过设定长和宽分别为2δx1,2δy1的邻域范围cbox,再对支柱搜索层进行邻域
搜索,通过统计密度阈值判定邻域内点云是否为支柱点云,若满足条件则判定为支柱点云数据并计算获取其支柱中心点,反之则舍弃;
[0024]
2)针对支柱中心点的初提取结果再次进行邻域搜索,对提取结果中的伪支柱中心点进行滤除,使每个支柱中心点与支柱区域点云数据一一对应;
[0025]
3)通过计算关键轨迹点与支柱中心点之间的欧式距离,通过比较获取与各支柱中心点欧氏距离最近的关键轨迹点索引值,构建支柱中心点与关键轨迹点之间的拓扑关系,再以支柱中心点为纽带,构建关键轨迹点与支柱中心点上方支撑设施之间的拓扑关系,实现支柱中心点、关键轨迹点与支撑设施搜索层空间索引的构建。构建空间索引相关公式如下:
[0026]
dis=min(disi),i∈r
+
ꢀꢀ
(3)
[0027][0028]
式中:
[0029]
indexj:第j个支柱中心点索引值;
[0030]
min(disi):支柱中心点与关键轨迹点最短距离。
[0031]
步骤s3包括以下子步骤:
[0032]
(1)首先依据空间索引快速定位与支柱中心点相关联的支撑设施初提取区域,并依据支柱中心点坐标确定裁剪范围,再通过空间索引快速确定与之关联的关键轨迹点坐标,对裁剪范围进行仿射变换,最后根据支柱两侧点云数量特征的差异性缩小裁剪范围,使用柱体滤波器将支柱、回路以及棘轮滤除,得到支撑设施初提取结果;
[0033]
(2)初提取结果进行参数化模型投影,将点云数据投影至二维平面内,然后在设定分辨率下对平面进行离散化处理,获取一系列栅格点云数据,通过判断栅格内点云数据的数量特征来决定栅格内点云是否滤除,优化后的提取结果即为提取得到的支撑设施点云数据。
[0034]
在上述的步骤(1)中,支柱、棘轮作为接触网重要的架设装置,其具有沿竖直方向分布的特征,结合点云库半径滤波器与支柱分布特点提出柱体滤波器,依据支柱中心点坐标设定柱体滤波范围对支撑设施搜索层点云数据进行处理,对判定为非支撑设施的点云数据进行滤除。
[0035]
在上述的步骤(2)中,接触线作为接触网重要的供电装置,其具有沿水平方向分布与点云数量特征占比低的特点,结合pcl参数化模型投影与离散化处理思想的方法对初提取结果进行结果优化,对判定为接触线的点云数据进行滤除。
[0036]
本发明利用支柱中心点、关键轨迹点与支撑设施搜索层之间的空间关系,快速定位支撑设施点云区域,并联合柱体滤波与参数化投影等点云滤波,通过充分结合两者的各自优势,实现支撑设施的初提取与结构优化,与现有技术相比,本发明具有以下有益效果:
[0037]
(1)本发明采用激光点云作为铁路接触网支撑设施全自动提取算法的数据基础,采集数据受外界影响较小且能够表达铁路设施丰富的空间及属性信息;
[0038]
(2)本发明采用柱状点云滤波、pcl参数化投影滤波的方式对支撑设施初提取结果进行优化,实现对接触线与支撑设施连接设施的精确剔除,提高了支撑设施的提取精度,更好地适用复杂的支撑设施类型;
[0039]
(3)本发明采用邻域搜索对支柱中心点进行提取,明晰铁路设施之间的空间关系,并基于支柱中心点、关键轨迹点以及支撑设施搜索层之间的拓扑关系构建空间索引,达到快速获取轨迹坐标以确定铁路延伸方向向量以及快速锁定关联支撑设施搜索层区域的目的。
[0040]
(4)本发明分析铁路设施的空间关系并基此进行支撑设施的全自动提取,相较于传统的支撑设施提取方式,其提取效率高、提取结果全面详实,能够适应多类型场景,测量精度满足后续几何参数测量等接触网检测项目的要求。
附图说明
[0041]
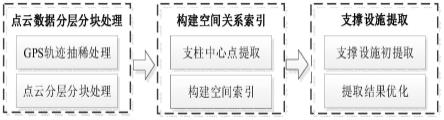
图1是本发明的自动提取方法的流程图;
[0042]
图2a是本发明中轨迹点云末端超过n/2情况处理示意图;
[0043]
图2b是本发明中轨迹点云末端未超过n/2情况处理示意图;
[0044]
图3是本发明中对裁剪区域进行仿射变换的示意图;
[0045]
图4是本发明中将原始点云数据分层分块处理的示意图;
[0046]
图5a是对支柱搜索层区域进行邻域搜索处理的示意图;
[0047]
图5b所示为初提取的支柱中心点示意图;
[0048]
图5c是伪支柱中心点示意图;
[0049]
图5d是对伪支柱中心点进行滤波处理的结果示意图;
[0050]
图6是球形搜索与柱体搜索示意图;
[0051]
图7a是初提取示意图;
[0052]
图7b是初提取结果;
[0053]
图8是融合参数化投影与离散化处理思想的滤波示意图;
[0054]
图9a是多类型支撑设施的测试数据;
[0055]
图9b是多类型支撑设施的测试结果数据;
[0056]
图10a是多类型支柱分布情况支撑设施测试数据;
[0057]
图10b是多类型支柱分布情况支撑设施测试结果数据;
[0058]
图11是示范应用测试结果。
具体实施方式
[0059]
本发明的顾及空间关系的支撑设施全自动提取算法采用车载激光扫描仪进行铁路场景整体激光扫描。通过利用支柱中心点、关键轨迹点与支撑设施搜索层区域之间相对稳定的空间关系进行算法设计与计算机程序实现,全自动进行铁路场景点云数据中支撑设施的提取。
[0060]
下面结合附图对本发明的支撑设施全自动提取方法进行详细说明。
[0061]
图1为本发明的支撑设施全自动提取方法的流程图。该方法主要包括三步:s1、通过对gps轨迹点抽稀处理获取关键轨迹点,并依此对原始点云数据进行分层、分块处理,实现对原始点云数据中支柱区域与支撑设施区域的划分;s2、通过邻域搜索获取支柱中心点,并依据其与关键轨迹点和支撑设施搜索层的空间关系构建空间索引;s3、以该索引为驱动实现支撑设施的初提取,获取含有接触线的支撑设施,并引入柱状搜索、参数化投影滤波的
方式滤除接触线点云,实现提取结果的优化。具体如下:
[0062]
s1.在铁路场景点云数据中存在大量无关区域点云数据,且在任意两支柱之间存在多个gnss轨迹点,导致轨迹点与支柱、分层区域之间难以建立拓扑关系。为提高算法效率,使场景中铁路设施之间的空间关系更加清晰,本发明采用抽稀后得到的关键轨迹点对原始场景点云数据进行分层、分块处理。具体如下:
[0063]
1)gnss轨迹点抽稀处理:
[0064]
为提高支撑设施点云数据的检索效率,便于gnss轨迹点与支撑设施形成拓扑关系,依据公式(1)对gnss轨迹点进行抽稀处理。首先将m个gnss轨迹点划分为距离为n的若干段,每经过距离为n的一段后,以该段中心点作为轨迹关键点,如图2a所示,其中不足n/2的距离段忽略不计,如图2b所示。计算公式如下:
[0065][0066]
式中:
[0067]
f(p
(i,i+n)
):第i个关键点处的抽稀公式;
[0068]
pi:第i个轨迹点坐标值。
[0069]
2)原始点云分层、分块处理:
[0070]
由于原始点云数据延伸方向与坐标轴方向存在角度差异且在铁路场景中存在大量无关点云区域,所以需对原始点云数据进行数据分层和空间分块处理。具体步骤如下:
[0071]
首先利用关键轨迹点坐标及相邻gnss轨迹点坐标获取轨迹线法向量,即轨迹方向(x
1-x,y
1-y,0);再分别通过向量点积与向量叉积获取轨迹方向垂直向量及轨迹面垂直方向;最后将轨迹线法向量及其推算结果进行归一化处理,获取轨迹方向与坐标轴方向夹角相应的三角函数值,构建旋转矩阵对原始点云数据进行仿射变换,使轨迹方向更加贴合坐标轴方向,仿射变换示意图如图3所示。
[0072]
其次,针对支柱与支撑设施在高度上的分布差异,基于关键轨迹点分别构建一系列长、宽、高分别为2δx、2δy、z
2-z1,2δx、2δy、z
4-z3的支柱裁剪区域v1和支撑设施裁剪区域v2,经旋转矩阵matrix对其进行仿射变换后再对原始点云数据进行裁剪,最终达到对原始点云数据分层和空间分块的目的,原始点云数据分层分块示意图如图4所示。相关公式如下:
[0073]
式中:
[0074]v0
:其他无关区域;
[0075]
xi,yi,zi:pi点坐标。
[0076]
通过上述原始点云数据分层与空间分块步骤,剔除大量无关区域点云数据,实现对支柱与支撑设施点云数据的区域划分,使支柱中心点、关键轨迹点以及支撑设施搜索层
之间具有空间关系一致性。
[0077]
s2,为便于快速查找与支撑设施相关联的关键轨迹点数据,构建支撑设施裁剪框的旋转矩阵,同时快速锁定关联支撑设施搜索层区域,需对上述三类典型铁路点云数据构建空间索引。具体步骤如下:
[0078]
1)基于邻域搜索的支柱中心点提取:
[0079]
为便于构建支柱中心点、关键轨迹点以及支撑设施搜索层之间的空间索引,获取支撑设施的精确裁剪范围,应针对支柱设施点云数据中心点进行提取,避免补偿附砣、坠砣限制架等设施对支撑设施裁剪范围造成较大影响。本发明对空间分块处理后的支柱搜索层区域进行点云邻域搜索处理:
[0080]
通过设定长和宽分别为2δx1,2δy1的邻域范围cbox,再对支柱搜索层进行邻域搜索,处理示意图如图5a所示,通过统计密度阈值判定邻域内点云是否为支柱点云,若满足条件则判定为支柱点云数据并计算获取支柱中心点,反之则舍弃,提取结果如图5b所示。
[0081]
2)在获取到一系列支柱中心点云数据后,由于支柱搜索层区域存在局部重合区域以及支柱附属装置,导致出现伪支柱中心点,如图5c所示。为避免伪支柱中心点对支撑设施提取造成影响,本发明采用统计滤波器对邻域范围内的伪支柱中心点进行滤除,滤除结果如图5d所示。
[0082]
3)基于铁路设施间的拓扑关系构建空间索引:
[0083]
在铁路场景中,支柱中心点、关键轨迹点与支撑设施搜索层之间具有空间关系一致性,为提高算法对支撑设施的提取效率,本发明通过铁路设施之间的拓扑关系构建空间索引,达到能够依据支柱中心点坐标反算下方轨迹点坐标及支撑设施搜索层区域的目的。具体步骤如下:首先通过遍历关键轨迹点获取各点与支柱中心点之间的欧式距离disi;再通过比较得到与支柱中心点最近的关键轨迹点索引值indexj,构建支柱中心点与关键轨迹点之间的拓扑关系;最后以该点为纽带,构建支柱中心点与关键轨迹点上方支撑设施搜索层之间的拓扑关系,从而实现支柱中心点、关键轨迹点与支撑设施搜索层空间关系的构建,获取空间索引。具体公式如下:
[0084]
dis=min(disi),i∈r
+
ꢀꢀ
(3)
[0085][0086]
式中:
[0087]
indexj:第j个支柱中心点索引值;
[0088]
min(disi):支柱中心点与关键轨迹点最短距离。
[0089]
s3,由于铁路支撑设施存在分布不确定性且存在支柱、接触线等与支撑设施直接连接设施,因此无法依靠现有数据直接精确提取出支撑设施。因此本发明提出初提取与结果优化两步来实现支撑设施的精确提取。接触网支柱、棘轮等柱体附属装置作为接触网重要的架设装置,其具有沿竖直方向分布的特征,因此本发明结合点云库(point cloud library,pcl)半径滤波器与支柱分布特点提出柱体滤波器,依据支柱中心点坐标设定柱体滤波范围对支撑设施搜索层点云数据进行处理,具体步骤如下:
[0090]
(1)支撑设施旋转与初提取:
[0091]
本发明依据空间索引快速定位与支柱中心点相关联的支撑设施初提取区域,如图
7a所示,并依据支柱中心点坐标确定裁剪范围,再通过索引快速确定与之关联的关键轨迹点坐标,对获取的裁剪范围进行三维坐标变换,保证裁剪区域延伸方向与轨迹前进方向保持一致。最后根据支柱两侧点云数量特征的差异性缩小裁剪范围,使用柱体滤波器将支柱、回路以及棘轮等附属设施滤除,得到支撑设施初提取结果,柱体滤波器处理示意图如图6所示,处理结果如图7b所示。
[0092]
(2)融合参数化投影与离散化思想的提取结果优化:
[0093]
本发明提出参数化模型投影与离散化处理思想结合的滤波方法对线性附属装置进行处理,实现对支撑设施初提取结果的结果优化,如图8所示。在初提取结果中仍存在接触线等无关点云数据,为进一步保证提取结果精度,本发明根据接触线点云数据的数量特征及空间分布情况对离散化后的点云数据进行pcl参数化模型投影点云滤波处理,滤除接触线点云。具体为:首先将铁路点云数据投影到平面参数化模型上;然后在设定分辨率下将原始裁剪框离散化得到一系列栅格;最后通过阈值决定栅格内的点云数量是否被滤除。
[0094]
实施例1
[0095]
实验概况:
[0096]
通过轻型铁路移动测量扫描系统进行实验数据采集,该轻型铁路移动测量扫描系统主要由在轨测量轻型轮车和高精度的激光扫描设备z+f profile 9012组成,此设备的测线扫描频率为50hz-200hz,点最大扫描速率为101.6万点每秒,角度分辨率为0.0088
°
,角度精度能够达到0.02
°
rms,最远可实现119m的测程,线性误差小于1mm;该设备的载体移动速度为20-25km/h。选择南通西至盐城的高速铁路共计170km中的部分铁路场景进行测试。
[0097]
多类型支撑设施提取:
[0098]
支撑设施提取会因不同支撑设施类型呈现出不同的效果,进而影响算法功能的适用性,因此在支撑设施提取中对不同类型进行测试是验证算法适用功能的关键性步骤。为了评估不同类型支撑设施对支撑设施提取功能的影响,本发明选取六类支撑设施进行测试,测试数据如图9a所示,测试结果如图9b所示。
[0099]
多类型支柱分布情况支撑设施提取:
[0100]
支撑设施提取会因支柱分布特点不同呈现出不同的效果,进而影响到支撑设施的提取精度。为评估多类型支柱分布情况对支撑设施提取精度的影响,本发明对相邻支柱分布、对称支柱分布及不对称支柱分布三种支柱分布情形进行测试,测试数据如图10a所示,测试结果如图10b所示。
[0101]
示范应用测试:
[0102]
在真实铁路设施检测时,多将铁路线分为若干铁路单元数据进行检测,为进一步验证本发明算法对多接触网大场景处理的适用能力,本发明对南通西至盐城之间的10公里高速铁路场景进行应用测试,测试结果如图11所示。
[0103]
通过上述提取过程可知,通过铁路车载三维成像激光雷达系统能够高效获取丰富的目标测量数据,可为支撑设施提取提供数据基础。顾及支柱中心点、关键轨迹点以及支撑设施搜索层之间的空间关系进行支撑设施的全自动提取,单个支撑设施的提取时间约1分钟,对支撑设施的提取miou值均超过93%、dice系数均超过94%,可以精确完成10公里真实铁路场景数据中支撑设施的提取,其提取精度高,适用范围广,能够实现全自动化操作,而且兼顾多场景多类型的支撑设施点云数据,具有较强的鲁棒性和应用价值。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1