时间预测模型训练方法、时间预测方法及装置与流程
本发明涉及信息处理,尤其涉及一种时间预测模型训练方法、时间预测方法及装置。
背景技术:
1、目前在预估到达时间(estimated time of arrival,eta)领域,最常用的算法包括基于规则的逐路段累加方法、基于树模型的机器学习方法和基于深度模型的机器学习方法等。其中,基于规则的逐路段累加方法主要依赖人工经验设定的规则,但人工经验设定的规则的覆盖性较差,存在eta预测准确率低的问题;而基于树模型的机器学习方法和基于深度模型的机器学习方法,都只利用了走完路线全程的实际到达时间(actual time ofarrival,ata)作为监督信息,也会造成eta预测不准确的问题。
技术实现思路
1、以下是对本文详细描述的主题的概述。本概述并非是为了限制权利要求的保护范围。
2、本发明实施例提供了一种时间预测模型训练方法、时间预测方法及装置,能够提高对预估到达时间的预测准确性。
3、一方面,本发明实施例提供了一种时间预测模型训练方法,包括以下步骤:
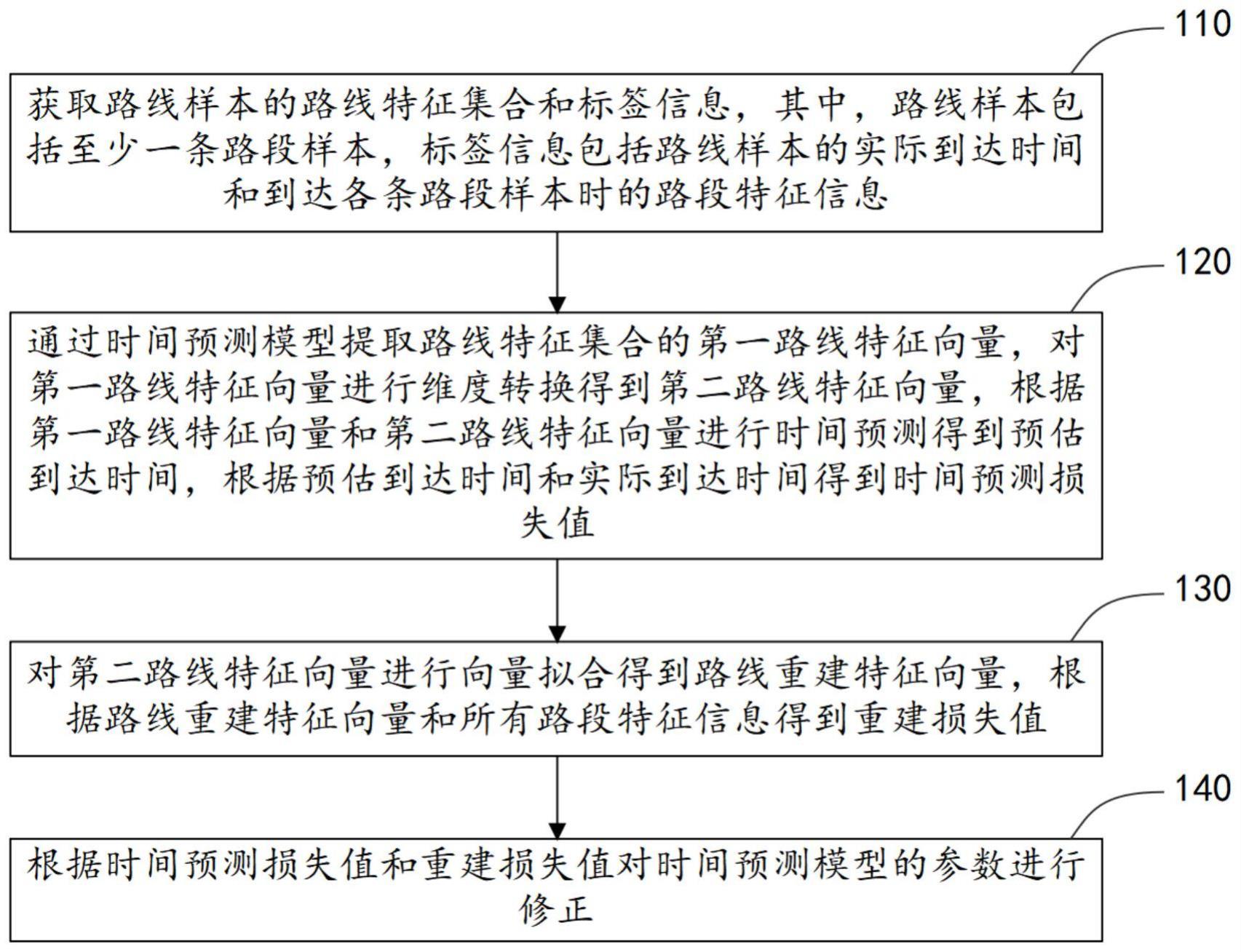
4、获取路线样本的路线特征集合和标签信息,其中,所述路线样本包括至少一条路段样本,所述标签信息包括所述路线样本的实际到达时间和到达各条所述路段样本时的路段特征信息;
5、通过时间预测模型提取所述路线特征集合的第一路线特征向量,对所述第一路线特征向量进行维度转换得到第二路线特征向量,根据所述第一路线特征向量和所述第二路线特征向量进行时间预测得到预估到达时间,根据所述预估到达时间和所述实际到达时间得到时间预测损失值;
6、对所述第二路线特征向量进行向量拟合得到路线重建特征向量,根据所述路线重建特征向量和所有所述路段特征信息得到重建损失值;
7、根据所述时间预测损失值和所述重建损失值对所述时间预测模型的参数进行修正。
8、另一方面,本发明实施例还提供了一种时间预测方法,包括以下步骤:
9、获取待预估路线的路线特征;
10、将所述路线特征输入至时间预测模型得到预估到达时间;
11、其中,所述时间预测模型通过如前面所述的时间预测模型训练方法训练得到。
12、另一方面,本发明实施例还提供了一种时间预测模型训练装置,包括:
13、样本获取单元,用于获取路线样本的路线特征集合和标签信息,其中,所述路线样本包括至少一条路段样本,所述标签信息包括所述路线样本的实际到达时间和到达各条所述路段样本时的路段特征信息;
14、第一损失值计算单元,用于通过时间预测模型提取所述路线特征集合的第一路线特征向量,对所述第一路线特征向量进行维度转换得到第二路线特征向量,根据所述第一路线特征向量和所述第二路线特征向量进行时间预测得到预估到达时间,根据所述预估到达时间和所述实际到达时间得到时间预测损失值;
15、第二损失值计算单元,用于对所述第二路线特征向量进行向量拟合得到路线重建特征向量,根据所述路线重建特征向量和所有所述路段特征信息得到重建损失值;
16、参数修正单元,用于根据所述时间预测损失值和所述重建损失值对所述时间预测模型的参数进行修正。
17、可选地,所述第二路线特征向量包括第一路线特征隐变量和路线特征方差;所述参数修正单元还用于:
18、根据所述第一路线特征隐变量和所述路线特征方差获取正态分布损失值;
19、根据所述正态分布损失值、所述时间预测损失值和所述重建损失值对所述时间预测模型的参数进行修正。
20、可选地,所述第一损失值计算单元还用于:
21、获取所述预估到达时间和所述实际到达时间之间的第一偏差信息;
22、根据所述第一偏差信息计算得到时间预测损失值。
23、可选地,所述路线重建特征向量包括各条所述路段样本的路段重建特征向量;所述第二损失值计算单元还用于:
24、获取所述路段重建特征向量和所述路段特征信息之间的第二偏差信息;
25、根据所述第二偏差信息计算得到重建损失值。
26、可选地,所述时间预测模型包括特征向量生成网络;所述第一损失值计算单元还用于:
27、将所述路线特征集合转换成路线特征矩阵;
28、通过所述特征向量生成网络对所述路线特征矩阵进行向量化处理,得到所述路线特征集合的第一路线特征向量。
29、可选地,所述时间预测模型包括变分自编码器,所述变分自编码器包括编码器;所述第一损失值计算单元还用于:
30、通过所述变分自编码器中的所述编码器对所述第一路线特征向量进行维度转换,得到第二路线特征向量,其中,所述第二路线特征向量的维度数量小于所述第一路线特征向量的维度数量。
31、可选地,所述时间预测模型包括变分自编码器,所述变分自编码器包括解码器;所述第二损失值计算单元还用于:
32、通过所述变分自编码器中的所述解码器对所述第二路线特征向量进行向量拟合,得到路线重建特征向量,其中,所述路线重建特征向量的维度数量等于所述第一路线特征向量的维度数量。
33、可选地,所述时间预测模型包括到达时间预估网络,所述第二路线特征向量包括第一路线特征隐变量;所述第一损失值计算单元还用于:
34、将所述第一路线特征向量和所述第一路线特征隐变量组合成目标输入参数;
35、通过所述到达时间预估网络对所述目标输入参数进行时间预测,得到预估到达时间。
36、另一方面,本发明实施例还提供了一种时间预测装置,包括:
37、路线获取单元,用于获取待预估路线的路线特征;
38、时间预测单元,用于将所述路线特征输入至时间预测模型得到预估到达时间;
39、其中,所述时间预测模型通过如前面所述的时间预测模型训练装置训练得到。
40、可选地,所述待预估路线包括至少一条路段,所述路线特征包括各个所述路段的路段特征,所述时间预测模型包括特征向量生成网络、变分自编码器和到达时间预估网络;
41、所述时间预测单元还用于:
42、通过所述特征向量生成网络对所有所述路段特征进行向量化处理,得到第三路线特征向量;
43、通过所述变分自编码器对所述第三路线特征向量进行维度转换,得到第二路线特征隐变量;
44、将所述第三路线特征向量和所述第二路线特征隐变量输入至所述到达时间预估网络进行时间预测,得到预估到达时间。
45、可选地,所述时间预测装置还包括:
46、生成单元,用于根据所述预估到达时间生成推荐内容;
47、发送单元,用于向终端发送所述推荐内容。
48、另一方面,本发明实施例还提供了一种电子设备,包括:
49、至少一个处理器;
50、至少一个存储器,用于存储至少一个程序;
51、当至少一个所述程序被至少一个所述处理器执行时实现如前面所述的时间预测模型训练方法,或者实现如前面所述的时间预测方法。
52、另一方面,本发明实施例还提供了一种计算机可读存储介质,其中存储有处理器可执行的程序,所述处理器可执行的程序被处理器执行时用于实现如前面所述的时间预测模型训练方法,或者实现如前面所述的时间预测方法。
53、另一方面,本发明实施例还提供了一种计算机程序产品,包括计算机程序或计算机指令,所述计算机程序或所述计算机指令存储在计算机可读存储介质中,计算机设备的处理器从所述计算机可读存储介质读取所述计算机程序或所述计算机指令,所述处理器执行所述计算机程序或所述计算机指令,使得所述计算机设备执行如前面所述的时间预测模型训练方法,或者执行如前面所述的时间预测方法。
54、本发明实施例至少包括以下有益效果:在提取路线特征集合的第一路线特征向量之后,对第一路线特征向量进行维度转换得到第二路线特征向量,根据第一路线特征向量和第二路线特征向量进行时间预测得到预估到达时间,以及对第二路线特征向量进行向量拟合得到路线重建特征向量,此时,利用到达各条路段样本时的路段特征信息作为调整路线重建特征向量的标签信息,能够提高第二路线特征向量的获取准确性以及增强时间预测模型的精度,另外,利用路线样本的实际到达时间作为调整预估到达时间的标签信息,能够提高第一路线特征向量和第二路线特征向量的获取准确性,所以,在根据第一路线特征向量和第二路线特征向量进行时间预测得到预估到达时间时,能够提高对预估到达时间的预测准确性,也就是说,通过利用路线样本的实际到达时间和到达各条路段样本时的路段特征信息作为训练时间预测模型的标签信息,能够提高时间预测模型对预估到达时间的预测准确性。
55、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在说明书、权利要求书以及附图中所特别指出的结构来实现和获得。
- 还没有人留言评论。精彩留言会获得点赞!