一种大气六参差异化的多模型融合校准方法及系统与流程
1.本发明涉及大气污染高精度和高密度时空计算技术领域,具体涉及一种大气六参差异化的多模型融合校准方法及系统。
背景技术:
2.传统大气污染源监测局限于标准固定站监测及固定式微站监测,不仅单台设备造价过高、而且因成本限制不能在城市区域大面积安装导致在城市空间无法达到全面域监测,因此从污染源监控层面而言做到理想精细化监测言之过早。随着大数据、云计算、人工智能、物联网等技术的高速发展,固定/移动双网融合+智能数据模型/决策支持使大气环境高密度、高精度监测以及科学溯源和政策指引成为可能。车载移动设备可在降低成本的同时构建新型移动式大气监测网,明晰污染源的起因与严重程度,在原固定站数据管理的基础上丰富并细化城市网格化管理技能,为高效的提升城市网格化监管水平提供大数据基础。
技术实现要素:
3.针对现有技术中的上述不足,本发明提供了一种大气六参差异化的多模型融合校准方法及系统。
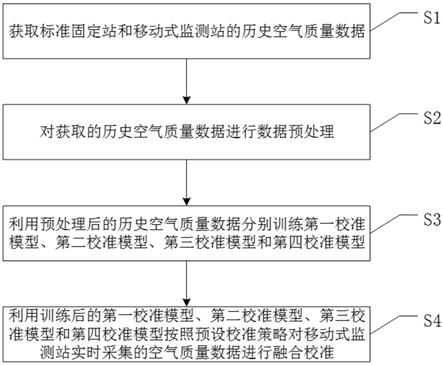
4.为了达到上述发明目的,本发明采用的技术方案为:第一方面,本发明提出了一种大气六参差异化的多模型融合校准方法,包括以下步骤:获取标准固定站和移动式监测站的历史空气质量数据;对获取的历史空气质量数据进行数据预处理;利用预处理后的历史空气质量数据分别训练第一校准模型、第二校准模型、第三校准模型和第四校准模型;利用训练后的第一校准模型、第二校准模型、第三校准模型和第四校准模型按照预设校准策略对移动式监测站实时采集的空气质量数据进行融合校准。
5.进一步地,所述对获取的历史空气质量数据进行数据预处理,具体包括:将移动式监测站采集的历史空气质量数据按照标准固定站的采集频率进行网格聚合;判断历史空气质量数据的时间序列是否异常;若是,则删除该空气质量数据;否则不作处理;判断历史空气质量数据的位置定位是否异常;若是,则删除该空气质量数据;否则不作处理;判断历史空气质量数据是否存在缺失值;若是,则对缺失值进行插值填补;否则不作处理;判断历史空气质量数据是否存在奇异值;若是,则对奇异值进行插值替换;否则不
作处理;判断历史空气质量数据是否存在错误值;若是,则对错误值进行插值替换;否则不作处理。
6.进一步地,所述将移动式监测站采集的历史空气质量数据按照标准固定站的采集频率进行网格聚合,具体包括:对监测区域全局空间按照设定空间尺度进行网格化划分;以任一网格为中心,以设定距离为半径,形成数据区域,并将数据区域内所有移动式监测站采集的历史空气质量数据按照标准固定站的采集频率取均值。
7.进一步地,利用预处理后的历史空气质量数据训练第一校准模型,具体包括:设定模型训练的采样时段,以标准固定站的采集频率作为采样步长,从预处理后的历史空气质量数据中提取移动式监测站的监测值和移动式监测站所经过标准固定站的监测值;分别计算移动式监测站的监测值在时空单元的均值,并与移动式监测站所经过标准固定站的监测值组成空气质量散点对;利用所有空气质量散点对拟合校准函数,得到第一校准模型。
8.进一步地,利用预处理后的历史空气质量数据训练第二校准模型,具体包括:设定模型训练的采样时段,以标准固定站的采集频率作为采样步长,从预处理后的历史空气质量数据中提取移动式监测站和标准固定站的监测值;计算所有标准固定站的监测值均值与任一移动式监测站的监测值均值的差值,作为第二校准系数,得到第二校准模型。
9.进一步地,利用预处理后的历史空气质量数据训练第三校准模型,具体包括:设定模型训练的采样时段,以标准固定站的采集频率作为采样步长,从预处理后的历史空气质量数据中提取移动式监测站的监测值和移动式监测站所经过所有标准固定站的监测值;计算移动式监测站所经过所有标准固定站的监测值均值与任一移动式监测站的监测值均值的差值,作为第三校准系数,得到第三校准模型。
10.进一步地,利用预处理后的历史空气质量数据训练第四校准模型,具体包括:设定模型训练的采样时段,以标准固定站的采集频率作为采样步长,从预处理后的历史空气质量数据中提取移动式监测站的监测值和标准固定站的监测值;计算所有标准固定站的监测值均值与所有移动式监测站的监测值均值的差值,作为第四校准系数,得到第四校准模型。
11.进一步地,所述利用训练后的第一校准模型、第二校准模型、第三校准模型和第四校准模型按照预设校准策略对移动式监测站实时采集的空气质量数据进行融合校准,具体包括:对大气六参中pm
2.5
和pm
10
的监测值,判断当前移动式监测站是否存在第三校准模型;若是,则利用第三校准模型对当前移动式监测站的pm
2.5
和pm
10
的监测值进行校准;否则进行下一步骤;判断当前移动式监测站是否存在第二校准模型;若是,则利用第二校准模型对当前移动式监测站的pm
2.5
和pm
10
的监测值进行校准;否则利用第四校准模型对当前移动式监
测站的pm
2.5
和pm
10
的监测值进行校准;对大气六参中co、no2、so2和o3的监测值,判断当前移动式监测站是否存在第一校准模型;若是,则利用第一校准模型对当前移动式监测站的co、no2、so2和o3的监测值进行校准;否则进行下一步骤;判断当前移动式监测站是否存在第二校准模型;若是,则利用第二校准模型对当前移动式监测站的co、no2、so2和o3的监测值进行校准;否则利用第四校准模型对当前移动式监测站的co、no2、so2和o3的监测值进行校准。
12.第二方面,本发明提出了一种大气六参差异化的多模型融合校准系统,包括:数据获取模块,用于获取标准固定站和移动式监测站的历史空气质量数据;数据预处理模块,用于对获取的历史空气质量数据进行数据预处理;模型训练模块,用于利用预处理后的历史空气质量数据分别训练第一校准模型、第二校准模型、第三校准模型和第四校准模型;融合校准模块,用于利用训练后的第一校准模型、第二校准模型、第三校准模型和第四校准模型按照预设校准策略对移动式监测站实时采集的空气质量数据进行融合校准。
13.本发明具有以下有益效果:本发明以标准固定站和移动式监测站的历史空气质量数据二者互为补充,在污染源监测层面提高数据时空覆盖率与分辨率,并通过多源数据预测模型,为政府与企业对空气质量监管与决策过程中提供数据资料以及高密度和高精度的大气微环境信息,指导监管者做出科学、合适、靶向的决策依据。
附图说明
14.图1为本发明实施例1提供的一种大气六参差异化的多模型融合校准方法流程示意图;图2为本发明实施例2提供的一种大气六参差异化的多模型融合校准系统结构示意图。
具体实施方式
15.下面对本发明的具体实施方式进行描述,以便于本技术领域的技术人员理解本发明,但应该清楚,本发明不限于具体实施方式的范围,对本技术领域的普通技术人员来讲,只要各种变化在所附的权利要求限定和确定的本发明的精神和范围内,这些变化是显而易见的,一切利用本发明构思的发明创造均在保护之列。
16.移动监测数据由于其传感器本身的监测标准和出厂设置的各异性,加上受其载体的瞬时速度以及局部大气环境(如温度和相对湿度)影响,普遍存在测量数据偏差和不稳定。本发明提出了针对单点移动数据校准方法,以标准固定监测站(国控站、省控站、区控站)的数据为校准基础,通过第一校准模型、第二校准模型、第三校准模型和第四校准模型融合的方式,并且结合以上各模型特点以及移动监测设备采集到的大气六参数据的特性,不同污染物采用不同的模型组合,对原始移动数据进行高准确率和高校准率的校准。校准后的移动站空气质量数据,为大气实时监控、空间推断、污染溯源、预测预警和决策支持提供了坚实数据基础。
17.实施例1如图1所示,本发明实施例提供了一种大气六参差异化的多模型融合校准方法,包括以下步骤s1至步骤s4:s1、获取标准固定站和移动式监测站的历史空气质量数据;在本步骤中,本发明所指的标准固定站是符合国家标准的大气固定监测站,包括国控站、省控站、区控站;移动式监测站是通过车载式气体和颗粒物指标传感器和低功耗嵌入式处理器,对空气质量数据进行收集的一种移动式监测站。
18.本发明根据标准固定站和移动式监测站的采样频率,获取过去一段时间内的移动式监测站的未校准历史空气质量数据,以及该时间段内标准固定站的历史空气质量数据。
19.一般而言,标准固定站的空气质量数据是小时级数据,移动式监测站的空气质量数据是秒级实时数据,因此本发明通过获取过去n小时内的标准固定站和移动式监测站的历史空气质量数据来对移动式监测站的实时监测数据进行实时校准。
20.s2、对获取的历史空气质量数据进行数据预处理;在本步骤中,由于标准固定站的空气质量数据可以提供空气污染物浓度的连续时间序列,但是只能在单一的空间位置,而移动式监测站的空气质量数据可以在不同时间提供不同地点的污染物浓度,从时空的角度而言此为固定和移动数据的异构性。另外,标准固定站的空气质量数据大多经过科学校验,其数据噪音小,较稳定;而移动式监测站的空气质量数据往往需要校准,且受大气微环境影响,数据噪音较大并且有系统偏差。因此本技术需要对获取的历史空气质量数据进行数据预处理。
21.本发明对获取的历史空气质量数据进行数据预处理,具体包括以下分步骤s2-1至步骤s2-6:s2-1、将移动式监测站采集的历史空气质量数据按照标准固定站的采集频率进行网格聚合;具体而言,由于标准固定站的空气质量数据是小时级数据,移动式监测站的空气质量数据是秒级实时数据,因此本发明需要将移动式监测站采集的历史空气质量数据按照标准固定站的采集频率进行网格聚合,具体包括:对监测区域全局空间按照设定空间尺度进行网格化划分;以任一网格为中心,以设定距离为半径,形成数据区域,并将数据区域内所有移动式监测站采集的历史空气质量数据按照标准固定站的采集频率取均值。
22.在本实施例中,本发明首先对监测区域全局空间按照设定空间尺度进行网格化划分,其中采用的空间尺度可以为1
×
1千米,2
×
2千米等;然后将每个网格所处的空间范围进行适当扩大,即以任一网格为中心,以设定距离为半径,形成数据区域,从而将数据区域内所有移动式监测站采集的历史空气质量数据按照标准固定站的采集频率取均值,实现将移动式监测站采集的历史空气质量数据按网格聚合为小时平均数。
23.s2-2、判断历史空气质量数据的时间序列是否异常;若是,则删除该空气质量数据;否则不作处理;其中时间序列异常的判断标准可以根据移动式监测站采集的空气质量数据长时间数值恒定或变化剧烈无规律进行判定。
24.s2-3、判断历史空气质量数据的位置定位是否异常;若是,则删除该空气质量数据;否则不作处理;其中位置定位异常的判断标准可以根据移动式监测站的gps定位数据严
重漂移或者长时间静止进行判定。
25.s2-4、判断历史空气质量数据是否存在缺失值;若是,则对缺失值进行插值填补;否则不作处理;s2-5、判断历史空气质量数据是否存在奇异值;若是,则对奇异值进行插值替换;否则不作处理;其中奇异值的判断标准可以根据某时刻数值明显高于或低于平均值的数值进行判定。
26.s2-6、判断历史空气质量数据是否存在错误值;若是,则对错误值进行插值替换;否则不作处理。其中错误值的判断标准可以根据数据为负数进行判定。
27.上述插值方法可以采用本领域常用的如线性插值法等方法,本发明不做赘述。
28.s3、利用预处理后的历史空气质量数据分别训练第一校准模型、第二校准模型、第三校准模型和第四校准模型;在本步骤中,本发明利用预处理后的标准固定站的历史空气质量数据和移动式监测站的历史空气质量数据,分别滚动训练第一校准模型、第二校准模型、第三校准模型和第四校准模型。
29.下面对每个校准模型的训练过程进行具体说明。
30.本发明利用预处理后的标准固定站的历史空气质量数据和移动式监测站的历史空气质量数据训练第一校准模型,具体包括:设定模型训练的采样周期,以标准固定站的采集频率作为采样步长,从预处理后的历史空气质量数据中提取移动式监测站的监测值和移动式监测站所经过标准固定站的监测值;分别计算移动式监测站的监测值在时空单元的均值,并与移动式监测站所经过标准固定站的监测值组成空气质量散点对;利用所有空气质量散点对拟合校准函数,得到第一校准模型。
31.具体而言,本发明设定模型训练的采样时段为t,即以该采用时段内n小时的数据为训练集,以标准固定站的采集频率1小时作为采样步长,从预处理后的历史空气质量数据中提取任一移动式监测站在过去n小时经过的所有标准固定站的监测值,记为
푥i;将过去n小时该移动式监测站的监测值在时空单元维度取平均值,记为yi;i为监测值数量。
32.其中本发明所描述的经过可以以距离作为筛选条件,通过判断移动式监测站的位置是否处于以标准固定站为中心,以设定距离为半径的区域内;若是,则判定移动式监测站经过该标准固定站,否则判定移动式监测站没有经过该标准固定站。
33.本发明所描述的时空单元是指网格与时间戳的笛卡尔乘积,每一个网格在每一特定时间戳作为一个时空单元。
34.本发明将移动式监测站在时空单元上每小时的监测值均值与移动式监测站所经过标准固定站的监测值组成空气质量散点对(
푥i, 푦i),基于多组空气质量散点对拟合校准函数,例如可以采用线性拟合函数等,从而构建第一校准模型。
35.由于每次训练具有一定的随机性(如数据被污染等),
푇
ꢀ−ꢀ
1时段与
푇
时段可能训练出差异较大的校准系数,造成校准后的数据存在突变。因此本发明可以将历史时段进行复合叠加,即将采样时段
푇 + 1所使用的校准模型所对应的训练数据时段为{
푇
ꢀ−ꢀ
2, 푇
ꢀ−ꢀ
1, 푇
}。
36.本发明利用预处理后的标准固定站的历史空气质量数据和移动式监测站的历史空气质量数据训练第二校准模型,具体包括:设定模型训练的采样周期,以标准固定站的采集频率作为采样步长,从预处理后的历史空气质量数据中提取移动式监测站和标准固定站的监测值;计算所有标准固定站的监测值均值与任一移动式监测站的监测值均值的差值,作为第二校准系数,得到第二校准模型。
37.具体而言,本发明从预处理后的历史空气质量数据中提取任一移动式监测站在过去n小时内所有监测值,并取平均值,记为;以及监测区域内所有标准固定站在过去n小时内每小时的监测值均值
푋
(
푡
),并将所有监测值均值
푋
(
푡
)取平均值,记为;然后计算所有标准固定站的监测值均值与任一移动式监测站的监测值均值的差值差值,作为第二校准系数,从而构建第二校准模型。
38.本发明利用预处理后的标准固定站的历史空气质量数据和移动式监测站的历史空气质量数据训练第三校准模型,具体包括:设定模型训练的采样时段,以标准固定站的采集频率作为采样步长,从预处理后的历史空气质量数据中提取移动式监测站的监测值和移动式监测站所经过所有标准固定站的监测值;计算移动式监测站所经过所有标准固定站的监测值均值与任一移动式监测站的监测值均值的差值,作为第三校准系数,得到第三校准模型。
39.具体而言,本发明从预处理后的历史空气质量数据中提取移动式监测站在过去n小时内所经过的所有标准固定站的监测值,并取平均值,记为;以及任一移动式监测站在过去n小时内所有监测值,并取平均值,记为;然后计算移动式监测站所经过的所有标准固定站的监测值均值与任一移动式监测站的监测值均值的差值的差值,作为第三校准系数,从而构建第三校准模型。
40.本发明利用预处理后的标准固定站的历史空气质量数据和移动式监测站的历史空气质量数据训练第四校准模型,具体包括:设定模型训练的采样时段,以标准固定站的采集频率作为采样步长,从预处理后的历史空气质量数据中提取移动式监测站的监测值和标准固定站的监测值;计算所有标准固定站的监测值均值与所有移动式监测站的监测值均值的差值,作为第四校准系数,得到第四校准模型。
41.具体而言,本发明从预处理后的历史空气质量数据中提取监测区域内所有标准固定站在过去n小时内每小时的监测值均值
푋
(
푡
),并将所有监测值均值
푋
(
푡
)取平均值,记为;以及监测区域内所有移动式监测站在过去n小时内所有监测值,并取平均值,记为;
然后计算所有标准固定站的监测值均值与所有移动式监测站的监测值均值的差值差值,作为第四校准系数,从而构建第四校准模型。
42.本发明通过利用获取的标准固定站和移动式监测站的历史空气质量数据滚动训练校准模型集,从而实现对下一小时的移动式监测站的实时监测数据进行实时校准。
43.s4、利用训练后的第一校准模型、第二校准模型、第三校准模型和第四校准模型按照预设校准策略对移动式监测站实时采集的空气质量数据进行融合校准。
44.在本步骤中,本发明结合第一校准模型、第二校准模型、第三校准模型和第四校准模型的特点以及移动式监测站采集的大气六参数据的特性,为了保证校准的准确率和校准率,不同污染物采用不同的校准方式。
45.由于移动式监测站所采用的颗粒物指标传感器只采集pm
2.5
的浓度,pm
10
值则通过算法内置计算得到。当遇到沙尘暴、降雨等会导致空气中颗粒物浓度突变的天气时,移动式监测站采集的pm
10
浓度会失常,并且可能出现pm
2.5
倒挂的情形。而本发明构建的第一校准模型需要一定数量的训练集才能进行函数拟合,所以某些移动式监测站可能缺失该模型;该模型对容易受气候影响突变的大气污染物校准效果表现不佳,但是天气稳定时校准准确率高。
46.因此为了保证pm
2.5
和pm
10
的校准准确率,本发明对大气六参中pm
2.5
和pm
10
的监测值采用如下校准策略进行校准:首先判断当前移动式监测站是否存在第三校准模型;若是,则利用第三校准模型对当前移动式监测站的pm
2.5
和pm
10
的监测值进行校准;否则进行下一步骤;然后判断当前移动式监测站是否存在第二校准模型;若是,则利用第二校准模型对当前移动式监测站的pm
2.5
和pm
10
的监测值进行校准;否则利用第四校准模型对当前移动式监测站的pm
2.5
和pm
10
的监测值进行校准。
47.为了保证co、no2、so2和o3的校准准确率,本发明对大气六参中co、no2、so2和o3的监测值采用如下校准策略进行校准:首先判断当前移动式监测站是否存在第一校准模型;若是,则利用第一校准模型对当前移动式监测站的co、no2、so2和o3的监测值进行校准;否则进行下一步骤;然后判断当前移动式监测站是否存在第二校准模型;若是,则利用第二校准模型对当前移动式监测站的co、no2、so2和o3的监测值进行校准;否则利用第四校准模型对当前移动式监测站的co、no2、so2和o3的监测值进行校准。
48.本发明提出移动式监测站与标准固定站形成“双网融合”模式,以标准站为基础,为实现对移动站高精度的校准,采用多模型融合的方式对移动站数据进行校准。移动式监测站与标准固定站二者互为补充,在污染源监测层面提高数据时空覆盖率与分辨率,并通过多源数据预测模型,对空气质量监管与决策过程中提供数据资料以及高密度和高精度的大气微环境信息,指导监管者做出科学、合适、靶向的决策依据,这对空气判断污染源及污染物,对环境污染防治的对策及管理有着重要的意义。
49.实施例2如图2所示,本发明实施例提供了一种大气六参差异化的多模型融合校准系统,包括:
数据获取模块,用于获取标准固定站和移动式监测站的历史空气质量数据;数据预处理模块,用于对获取的历史空气质量数据进行数据预处理;模型训练模块,用于利用预处理后的历史空气质量数据分别训练第一校准模型、第二校准模型、第三校准模型和第四校准模型;融合校准模块,用于利用训练后的第一校准模型、第二校准模型、第三校准模型和第四校准模型按照预设校准策略对移动式监测站实时采集的空气质量数据进行融合校准。
50.本发明实施例提供的大气六参差异化的多模型融合校准系统具有实施例1所描述的大气六参差异化的多模型融合校准方法的有益效果。
51.本发明是参照根据本发明实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
52.这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
53.这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
54.本发明中应用了具体实施例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本发明的限制。
55.本领域的普通技术人员将会意识到,这里所述的实施例是为了帮助读者理解本发明的原理,应被理解为本发明的保护范围并不局限于这样的特别陈述和实施例。本领域的普通技术人员可以根据本发明公开的这些技术启示做出各种不脱离本发明实质的其它各种具体变形和组合,这些变形和组合仍然在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1