一种基于图像识别的安检复检方法及系统与流程
1.本发明涉及大数据计算技术领域,特别是涉及一种基于图像识别的安检复检方法及系统。
背景技术:
2.x 光安检是公共安全防御的一道重要防线,通过对物品进行透视扫描,进而发现隐藏在行李中的违禁品。目前安检仍需安检人员通过肉眼对 x 光安检图像里的违禁品进行识别,安检人员作为一个压力密集型的职业长期处于高压的工作环境会造成工作上的差错从而影响航空运行安全。在人工智能快速发展的今天,由机器辅助人工实现智能安检对提高安检员的工作效率具有重要意义,智能安检是安检行业未来发展的必然趋势。x光安检图像存在背景复杂、违禁品尺度多样以及相互遮挡现象,导致传统的单一来源数据无法获得满意的效果,也给安检复检带来很大的不便。
技术实现要素:
3.基于上述问题,本发明提供一种基于图像识别的安检复检方法、系统,通过三维立体式x光信息采集装置进行信息采集,通过对危险品进行三维信息采集建模,通过标准化映射算法对三维x光图像信息进行处理,经过学习获得危险品三维特征矩阵,再通过特征值提取算法获得危险品特征矩阵的特征值,对待检测物品进行三维立体式x光信息采集,对获得三维信息通过标准化映射算法,进行待检测物品三维特征矩阵建模,再通过特征值提取算法获得待检测物品特征矩阵的特征值。通过特征值对比,实现待检测物品智能识别,提高了测效率和检测精度,提高了安检复检系统的可靠性。
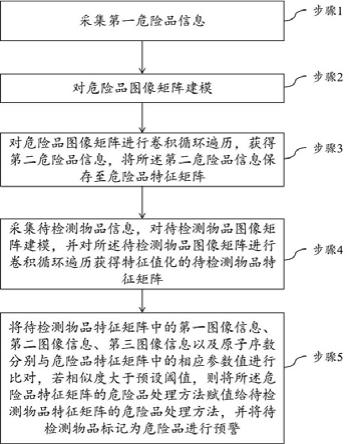
4.第一方面,本发明实施例提供一种基于图像识别的安检复检方法,包括:步骤1,采集第一危险品信息;步骤2,对危险品图像矩阵建模;步骤3,对危险品图像矩阵进行卷积循环遍历,获得第二危险品信息,将所述第二危险品信息保存至危险品特征矩阵;步骤4,采集待检测物品信息,对待检测物品图像矩阵建模,并对所述待检测物品图像矩阵进行卷积循环遍历获得特征值化的待检测物品特征矩阵;步骤5,将待检测物品特征矩阵中的第一图像信息、第二图像信息、第三图像信息以及原子序数分别与危险品特征矩阵中的相应参数值进行比对,若相似度大于预设阈值,则将所述危险品特征矩阵的危险品处理方法赋值给待检测物品特征矩阵的危险品处理方法,并将待检测物品标记为危险品进行预警。
5.进一步地,所述采集第一危险品信息包括采集第一危险品信息的危险品名称、种类、处理方法、第一图像信息、第二图像信息、第三图像信息,所述第一图像信息、第二图像信息以及第三图像信息为不同角度采集的图像信息。
6.进一步地,所述对危险品图像矩阵建模包括:
建立危险品图像矩阵,其中,v表示危险品编号,a存储危险品名称,b存储危险品种类,c存储危险品处理方法,d存储危险品第一图像信息,e存储危险品第二图像信息,f存储危险品第三图像信息,g存储危险品原子序数,将所述采集的第一危险品信息保存至所述危险品图像矩阵中。
7.进一步地,所述步骤3包括:步骤31,对危险品图像信息进行分割,获得子图像,计算获取所述子图像的所有像素平均灰度值组成危险品图像的第一灰度矩阵;步骤32,对所述危险品图像的第一灰度矩阵进行标准化映射获得危险品图像的第二灰度矩阵;步骤33,对所述危险品图像的第二灰度矩阵进行特征值提取,将所述特征值保存至危险品特征矩阵。
8.进一步地,将特征值保存至危险品特征矩阵的过程包括:对于第一灰度矩阵,以九宫格方式对所述第一灰度矩阵进行遍历计算,九宫格每次扫过第一灰度矩阵时,计算九宫格所覆盖的矩阵四角数据h值的平均灰度值:其中,p为九宫格的半径,为第一灰度矩阵第x行第y列的数据的灰度值h,n表示第n个子图像;将计算结果的平均灰度值保存至第二灰度矩阵对应位置中,k = n/9,h1为第二灰度矩阵中第k个子图像的灰度值,第二灰度矩阵为映射后的矩阵;对于第二灰度矩阵,采用以下公式提取第二灰度矩阵的特征值:其中,用于描述第二灰度矩阵灰度清楚程度特征值,用于描述第二灰度矩阵灰度平均程度特征值,用于描述第二灰度矩阵灰度偏离程度特征值,为第二灰度矩阵中第x行第y列的数据的灰度值;将计算得到的cha保存到危险品特征矩阵的危险品第一图像信息的特征值参数中。
9.进一步地,所述步骤4包括:步骤41,对待检测物品图像信息进行分割,获得子图像,计算获取所述子图像的所有像素平均灰度值组成待检测物品图像的第一灰度矩阵;步骤42,对所述待检测物品图像的第一灰度矩阵进行标准化映射获得待检测物品图像的第二灰度矩阵;
步骤43,对所述待检测物品图像的第二灰度矩阵进行特征值提取,将所述特征值保存至待检测物品特征矩阵。
10.进一步地,所述步骤42、步骤43具体为:对于待检测物品图像的第一灰度矩阵,以九宫格方式进行遍历计算九宫格每次扫过待检测物品图像的第一灰度矩阵时,计算九宫格所覆盖的矩阵四角数据值的平均灰度值:其中,为九宫格的半径,为待检测物品图像的第一灰度矩阵第行第列的数据的灰度值,表示第个子图像;将计算结果的平均灰度值保存至待检测物品图像的第二灰度矩阵对应位置中,,为第二灰度矩阵中第个子图像的灰度值,第二灰度矩阵为映射后的矩阵;对于第二灰度矩阵,采用以下公式提取第二灰度矩阵的特征值;;其中,用于描述第二灰度矩阵灰度清楚程度特征值,用于描述第二灰度矩阵灰度平均程度特征值,用于描述第二灰度矩阵灰度偏离程度特征值,为待检测物品图像的第二灰度矩阵第行第列的数据的灰度值;将保存到待检测物品特征矩阵的待检测物品第一图像信息的特征值参数中。
11.另一方面,本发明还提供了一种基于图像识别的安检复检系统,其特征在于,所述系统包括采集模块、危险品建模模块、训练模块、计算模块以及比对预警模块:采集模块,用于采集第一危险品信息;危险品建模模块,用于对危险品图像矩阵建模;训练模块,用于对危险品图像矩阵进行卷积循环遍历,获得第二危险品信息,将所述第二危险品信息保存至危险品特征矩阵;计算模块,用于采集待检测物品信息,对待检测物品图像矩阵建模,并对所述待检
测物品图像矩阵进行卷积循环遍历获得特征值化的待检测物品特征矩阵;比对预警模块,用于将待检测物品特征矩阵中的第一图像信息、第二图像信息、第三图像信息以及原子序数分别与危险品特征矩阵中的相应参数值进行比对,若相似度大于预设阈值,则将所述危险品特征矩阵的危险品处理方法赋值给待检测物品特征矩阵的危险品处理方法,并将待检测物品标记为危险品进行预警。
12.另一方面,本发明还提供了一种计算机可读的存储介质,所述计算机可读的存储介质中存储有计算机程序,其中,所述计算机程序被设置为运行时执行基于图像识别的安检复检方法。
13.另一方面,一种电子设备,所述电子设备包括至少一个处理器;以及与至少一个所述处理器通信连接的存储器;其中,所述存储器存储有可被所述处理器执行的指令,所述指令用于被所述处理器执行以实现基于图像识别的安检复检方法;本发明提出了一种基于图像识别的安检复检方法、系统及电子设备,采集危险品信息,通过对危险品进行三维信息采集建模,利用标准化映射算法对采集的图像信息进行处理,经过训练学习获得危险品特征矩阵,并通过特征值提取算法获得危险品特征矩阵的特征值,对待检测物品进行训练、计算并获得待检测物品特征矩阵的特征值,并将两个特征值进行相似度比对,在相似度满足阈值要求时将危险品特征矩阵的危险品处理方法赋值给待检测物品特征矩阵的危险品处理方法并进行告警,实现待检测物品智能识别,提高了测效率和检测精度,提高了安检复检系统的可靠性。
附图说明
14.为了更清楚地说明本发明实施例的技术方案,下面将对本发明实施例的描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
15.图1是本发明基于图像识别的安检复检方法流程图;图2是本发明基于图像识别的安检复检系统结构框图。
具体实施方式
16.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例的附图,对本发明实施例的技术方案进行清楚、完整地描述。显然,所描述的实施例是本发明的一部分实施例,而不是全部的实施例。基于所描述的本发明的实施例,本领域普通技术人员所获得的所有其他实施例,都属于本发明保护的范围。
17.本发明提出了一种基于图像识别的安检复检方法、系统,基于x射线可以检测出图像以及原子序数的原理,对待检测物品进行建立原子曲度特征矩阵,再通过比对危险品原子曲度特征矩阵,主动告警危险品信息,从而提高检测效率。
18.具体地,一方面,本发明提供了一种基于图像识别的安检复检方法,如附图1所示;所述检测方法包括:步骤1,采集第一危险品信息;
步骤2,对危险品图像矩阵建模;步骤3,对危险品图像矩阵进行卷积循环遍历,获得第二危险品信息,将所述第二危险品信息保存至危险品特征矩阵;步骤4,采集待检测物品信息,对待检测物品图像矩阵建模,并对所述待检测物品图像矩阵进行卷积循环遍历获得特征值化的待检测物品特征矩阵;步骤5,将待检测物品特征矩阵中的第一图像信息、第二图像信息、第三图像信息以及原子序数分别与危险品特征矩阵中的相应参数值进行比对,若相似度大于预设阈值,则将所述危险品特征矩阵的危险品处理方法赋值给待检测物品特征矩阵的危险品处理方法,并将待检测物品标记为危险品进行预警。
19.具体地,所述步骤1,采集第一危险品信息包括:本发明的复检安检机由三部x光机组成,可以理解为可采集物品的三维立体信息,所采集信息包括从预设存储空间读取危险品名称、种类、处理方法等信息。另外,三部x光机分别从上至下、从左至右、从侧前方至侧后方采集物品x光图像,按照图像面积从大到小(需要说明的是,本发明提到的从大到小排序的目的是将第一、第二、第三图像信息大小统一在一个量级,可以是图像面积大小,也可以是图像像素大小)分别代表危险品第一图像信息、第二图像信息、第三图像信息,即本步骤采集的第一危险品信息包括危险品名称、种类、处理方法、第一图像信息、第二图像信息、第三图像信息。
20.具体地,所述步骤2,对危险品图像矩阵建模包括:建立危险品图像矩阵,其中,v表示危险品编号,a存储危险品名称,b存储危险品种类,c存储危险品处理方法,d存储危险品第一图像信息,e存储危险品第二图像信息,f存储危险品第三图像信息,g存储危险品原子序数,将所述采集的危险品三维立体信息保存至所述危险品图像矩阵中。
21.具体地,所述步骤3,对危险品图像矩阵进行卷积循环遍历,获得第二危险品信息,将所述第二危险品信息保存至危险品特征矩阵包括:为了进一步优化安检复检图像信息,本发明对危险品特征矩阵训练,建立危险品特征矩阵,其中,v表示危险品编号,a存储危险品名称,b存储危险品种类,c存储危险品处理方法,d1存储危险品第一图像信息的特征值,e1存储危险品第二图像信息的特征值,f1存储危险品第三图像信息的特征值,g存储危险品原子序数。
22.对危险品图像矩阵进行循环遍历,对每个危险品的图像信息d、e、f采取卷积算法,提取对应特征值d1、e1、f1,将遍历后的危险品信息保存到危险品特征矩阵中。
23.以危险品第一图像信息d为例,本发明特征值提取算法具体为:步骤31,对危险品图像信息进行分割,获得子图像,计算获取所述子图像的所有像素平均灰度值组成危险品图像的第一灰度矩阵;具体地,将危险品第一图像信息d按照t*t进行分割获得子图像,t大于等于81,且t为3的幂次方。对于每个子图像,计算获取所述子图像的所有像素的平均灰度值,组成图像d的第一灰度矩阵,其中,n表示第n个子图像,1《=n《=,xn表示子图像在矩阵的横坐标值,yn表示子图像在矩阵中的纵坐标值,h表示子图像的平均灰度值。
24.步骤32,对所述危险品图像的第一灰度矩阵进行标准化映射获得危险品图像第二灰度矩阵;具体地,所述标准化映射算法为:(1)对于第一灰度矩阵,以九宫格方式对矩阵进行遍历计算,九宫格每次扫过第一灰度矩阵时,计算九宫格所覆盖的矩阵四角数据h值的平均值。可以理解的是,九宫格方式对应于卷积矩阵的排列方式。
25.其中p为九宫格的半径,p=1,为该第一灰度矩阵第x行,第y列的数据的灰度值h。
26.将计算结果灰度值保存至第二灰度矩阵对应位置中。k = n/9,h1为第二灰度矩阵中第k个子图像的灰度值。第二灰度矩阵为映射后的矩阵。
27.步骤33,对所述危险品图像第二灰度矩阵进行特征值提取,将所述特征值保存至危险品特征矩阵。
28.具体地,所述特征值提取计算方法包括:(1)对于第二灰度矩阵,采用以下公式提取第二灰度矩阵的特征值cha。
[0029]29.以清楚程度、平均程度、偏离程度提取灰度矩阵的特征值。其中,用于描述第二灰度矩阵灰度清楚程度特征值,用于描述第二灰度矩阵灰度平均程度特征值,用于描述第二灰度矩阵灰度偏离程度特征值,x为第二灰度矩阵的列、y为第二灰度矩阵的行,为矩阵中第x行,第y列的数据的灰度值。
[0030]
(2)将计算得到的cha保存到危险品特征矩阵的d1中。
[0031]
需要强调的是,上述特征值提取算法是以危险品第一图像信息d为例,对于危险品第二图像信息e、危险品第三图像信息f特征值提取算法与前述算法相同,本发明在此不再赘述。
[0032]
具体地,所述步骤4,采集待检测物品信息,对待检测物品图像矩阵建模,并对所述待检测物品图像矩阵进行卷积循环遍历获得特征值化的待检测物品特征矩阵包括:对待检测物品复检信息采集,同样地,采集的待检测物品信息包括危险品名称、种类、处理方法、第一图像信息、第二图像信息、第三图像信息。
[0033]
待检测物品图像矩阵建模,建立待检测物品图像矩阵,其中,r存储待检测物品编号,存储待检测物品处理方法,存储待检测物品第一图像信
息,存储待检测物品第二图像信息,存储待检测物品第三图像信息,存储待检测物品原子序数。
[0034]
待检测物品特征矩阵训练。建立待检测物品特征矩阵,其中r存储待检测物品编号,存储待检测物品处理方法,存储待检测物品第一图像信息的特征值,存储待检测物品第二图像信息的特征值,存储待检测物品第三图像信息的特征值,存储待检测物品原子序数。
[0035]
对待检测物品图像矩阵的图像信息、、采取卷积算法,提取对应特征值、、,将待检测物品信息保存到待检测物品特征矩阵中。
[0036]
以待检测物品第一图像为例,待检测物品特征值提取算法如下:步骤41,对待检测物品图像信息进行分割,获得子图像,计算获取所述子图像的所有像素平均灰度值组成待检测物品图像第一灰度矩阵;将图像按照t*t进行分割,t大于等于81,且t为3的幂次方。对于每个子图像,获取子图像的所有像素的平均灰度值,组成图像的第一灰度矩阵,其中n表示第n个子图像,1《=n《=,xn表示子图像在矩阵的横坐标值,yn表示子图像在矩阵中的纵坐标值,h表示子图像的平均灰度值。
[0037]
步骤42,对所述待检测物品图像第一灰度矩阵进行标准化映射获得待检测物品图像第二灰度矩阵;具体地,所述标准化映射算法为:(1)对于待检测物品第一图像的第一灰度矩阵,以九宫格方式进行遍历计算九宫格每次扫过图像的第一灰度矩阵时,计算九宫格所覆盖的矩阵四角数据值的平均值。
[0038]
其中为九宫格的半径,通常情况下取1,为3*3列矩阵第x行,第y列的数据的灰度值。
[0039]
(2)将计算结果灰度值保存至图像的第二灰度矩阵对应位置中,,为第二灰度矩阵中第个子图像的灰度值。第二灰度矩阵为映射后的矩阵。
[0040]
步骤43,对所述待检测物品图像第二灰度矩阵进行特征值提取,将所述特征值保存至待检测物品特征矩阵。
[0041]
具体地,所述特征值提取计算方法包括:
(1) 对于图像的第二灰度矩阵,采用以下公式提取图像的第二灰度矩阵的特征值。
[0042]042][0042]
(2)其中,用于描述第二灰度矩阵灰度清楚程度特征值,用于描述第二灰度矩阵灰度平均程度特征值,用于描述第二灰度矩阵灰度偏离程度特征值,x为第二灰度矩阵的列、y为第二灰度矩阵的行,为待检测物品图像的第二灰度矩阵第行第列的数据的灰度值。
[0043]
将保存到待检测物品特征矩阵的中。
[0044]
具体地,所述步骤5具体为:特征矩阵比对与信息预警。将待检测物品特征矩阵的、、、分别与危险品特征矩阵的d1、e1、f1、g进行循环遍历比较。当四个参数的特征值相似度均大于预设阈值,例如相似度均大于80%时(80%只是一种实施方式),将危险品特征矩阵的行为c赋值给检测物品特征矩阵的行为,并将该被监测物品标记为危险品,将该危险品加入提示信息,并向前端发送预警信息。
[0045]
另一方面,本发明还提供了一种基于图像识别的安检复检系统,如附图2所示,所述系统包括采集模块、危险品建模模块、训练模块、计算模块以及比对预警模块:采集模块,用于采集第一危险品信息;危险品建模模块,用于对危险品图像矩阵建模;训练模块,用于对危险品图像矩阵进行卷积循环遍历,获得第二危险品信息,将所述第二危险品信息保存至危险品特征矩阵;计算模块,用于采集待检测物品信息,对待检测物品图像矩阵建模,并对所述待检测物品图像矩阵进行卷积循环遍历获得特征值化的待检测物品特征矩阵;比对预警模块,用于将待检测物品特征矩阵中的第一图像信息、第二图像信息、第三图像信息以及原子序数分别与危险品特征矩阵中的相应参数值进行比对,若相似度大于预设阈值,则将所述危险品特征矩阵的危险品处理方法赋值给待检测物品特征矩阵的危险品处理方法,并将待检测物品标记为危险品进行预警。
[0046]
另一方面,本实施例还提供一种计算机可读的存储介质,所述计算机可读的存储介质中存储有计算机程序,其中,所述计算机程序被设置为运行时执行上述技术方案任一
项中所述的方法。
[0047]
该计算机可读存储介质可以包括随机存储器(ram)、内存、只读存储器(rom)、电可编程rom、电可擦除可编程rom、寄存器、硬盘、可移动磁盘、cd-rom、或技术领域内所公知的任意其它形式的存储介质。
[0048]
另一方面,本实施例还提供一种电子设备,所述电子设备包括:至少一个处理器;以及与至少一个所述处理器通信连接的存储器;其中,所述存储器存储有可被所述处理器执行的指令,所述指令用于被所述处理器执行以实现前述的基于图像识别的安检复检方法。
[0049]
本发明提出了一种基于图像识别的安检复检方法、系统及电子设备,采集危险品信息,通过对危险品进行三维信息采集建模,利用标准化映射算法对采集的图像信息进行处理,经过训练学习获得危险品特征矩阵,并通过特征值提取算法获得危险品特征矩阵的特征值,对待检测物品进行训练、计算并获得待检测物品特征矩阵的特征值,并将两个特征值进行相似度比对,在相似度满足阈值要求时将危险品特征矩阵的危险品处理方法赋值给待检测物品特征矩阵的危险品处理方法并进行告警,实现待检测物品智能识别,提高了测效率和检测精度,提高了安检复检系统的可靠性。
[0050]
需要说明的是,除非另作定义,此处使用的技术术语或者科学术语应当为本发明所属领域内具有一般技能的人士所理解的通常意义。本发明的说明书以及权利要求书中使用的“第一”、“第二”以及类似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的组成部分。同样,“一个”或者“一”等类似词语也不表示数量限制,而是表示存在至少一个。“连接”或者“相连”等类似的词语并非限定于物理的或者机械的连接,而是可以包括电性的连接,不管是直接的还是间接的。“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变后,则该相对位置关系也相应地改变。
[0051]
以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明所述原理的前提下,还可以作出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1