一种点云数据的分层方法、装置、设备、介质及车辆与流程
本发明实施例涉及自动驾驶,具体而言,涉及一种点云数据的分层方法、装置、设备、介质及车辆。
背景技术:
1、在制作用于辅助车辆定位技术的高精度地图时,尤其是在停车场特别是地下停车场这一场景下,需要将车辆在行驶过程中所采集的三维的点云数据进行分层处理,得到不同层高的点云数据,从而针对每一层高度的点云数据,制作对应的高精度地图。
2、相关技术中,主要是对车辆的行驶轨迹进行平面拟合和分割,并找出每一个平面当做一层。但由于在地下停车场或者是高架桥等场景下,同一层往往不是同一个平面,因此,上述方案很容易出现分层错误,从而影响后续高精度地图的制作。
技术实现思路
1、本发明实施例提供一种点云数据的分层方法、装置、设备、介质及车辆,用以克服点云数据分层不准确的问题。
2、具体技术方案如下:
3、第一方面,本发明实施例提供了一种点云数据的分层方法,包括:
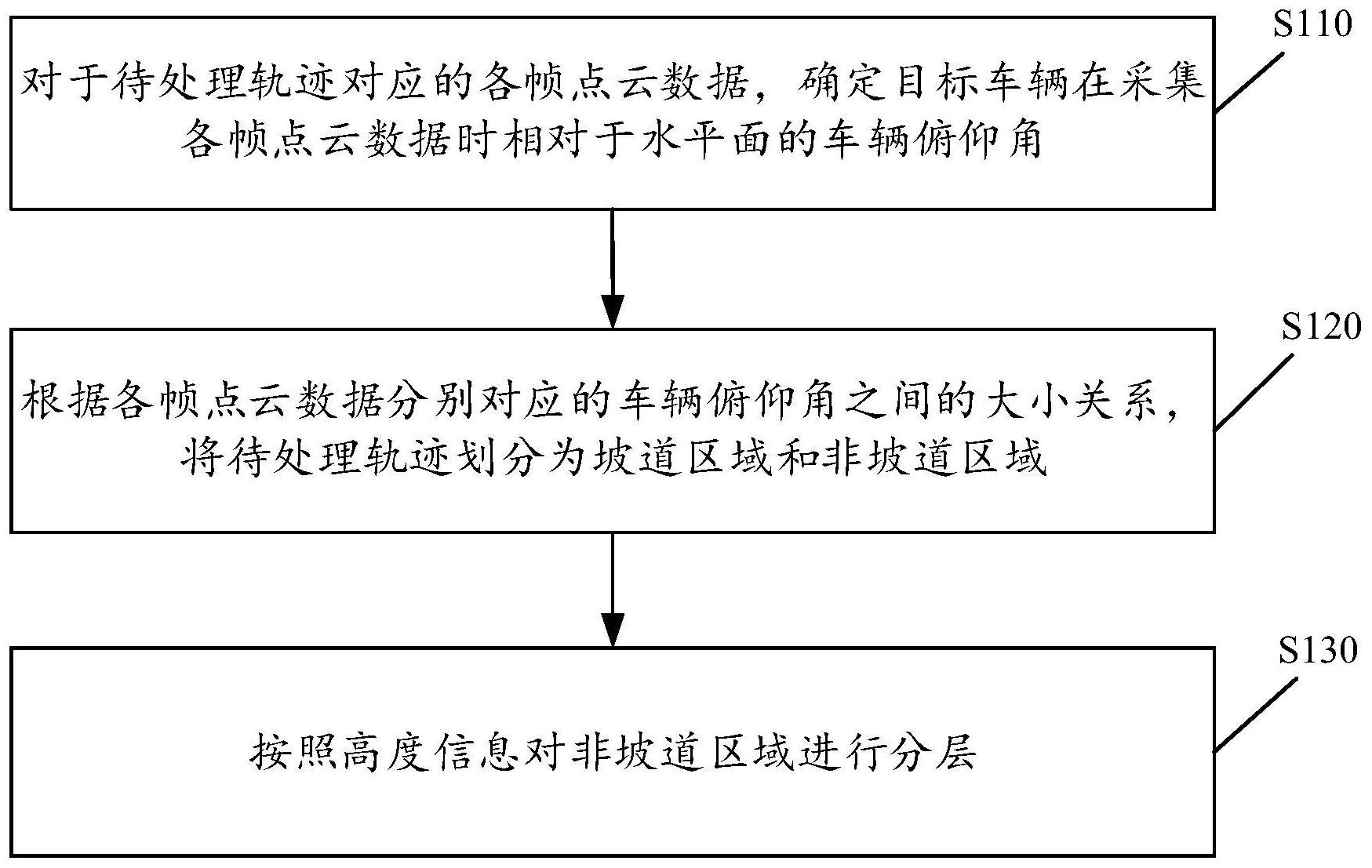
4、对于待处理轨迹对应的各帧点云数据,确定目标车辆在采集各帧点云数据时相对于水平面的车辆俯仰角;
5、根据各帧点云数据分别对应的车辆俯仰角之间的大小关系,将待处理轨迹划分为坡道区域和非坡道区域;
6、按照高度信息对非坡道区域进行分层。
7、通过上述方案可知,相对于相关技术中通过对待处理轨迹进行平面拟合和分割以对点云数据进行分层处理的方式,本发明实施例考虑到车辆在坡道路面和非坡道路面行驶时车辆姿态的差异性,通过确定用于表征车辆姿态的俯仰角,并根据车辆在非坡道路面行驶和在坡道路面行驶时车辆俯仰角的不同,将车辆行驶轨迹划分为坡道区域和非坡道区域,然后再对非坡道区域进行分层处理,避免了将不同层的点云数据划分为同一层点云数据的问题,提高了点云数据分层结果的准确性,从而有助于提高后续高精度地图的制作精度。
8、可选的,在按照高度信息对非坡道区域进行分层之后,本发明实施例提供的方法还包括:
9、按照非坡道区域的分层结果,对不同层中的点云数据进行可视化显示,并生成不同层高度对应的平面,以用于创建各平面对应的地图。
10、通过上述方案可知,对于点云数据的分层结果,可对不同层中的点云数据进行可视化显示,从而使得不同层分别由不同作业人员进行建图,以提高建图效率。对于创建完成的高精度地图,可将其应用于自动驾驶车辆的定位过程中,在高架桥、停车场,特别是地下停车场的场景下,可为自动驾驶车辆提供当前所在的路面的层数信息。
11、可选的,根据各帧点云数据分别对应的车辆俯仰角之间的大小关系,将所述待处理轨迹划分为坡道区域和非坡道区域,包括:
12、在各帧点云数据中,将车辆俯仰角大于预设角度的俯仰角所对应的点云数据,作为目标车辆在上坡或下坡时的第一点云数据;
13、将所有第一点云数据的集合所对应的待处理轨迹作为坡道区域,并将除第一点云数据之外的所有第二点云数据的集合所对应的待处理轨迹作为非坡道区域。
14、可选的,将所有第一点云数据的集合所对应的待处理轨迹作为坡道区域,并将除第一点云数据之外的所有第二点云数据的集合所对应的待处理轨迹作为非坡道区域,包括:
15、根据点云帧数索引值之间的连续性,将所有第一点云数据对应的点云帧数索引值划分为多个第一索引值范围,其中,第一索引值范围的个数用于表示目标车辆上坡或下坡的次数;
16、对于任意一个第一索引值范围,通过在该索引值范围两端位置分别增加若干个索引值,以将该第一索引值范围进行扩大,得到范围扩大后的目标索引值范围,并将各目标索引值范围所对应的待处理轨迹分别作为坡道区域;
17、基于第一点云数据对应的多个目标索引值范围以及点云帧数索引值之间的连续性,将除第一点云数据之外的第二点云数据对应的点云帧数索引值划分为多个第二索引值范围,并将各第二索引值范围所对应的待处理轨迹分别作为非坡道区域。
18、通过上述方案可知,基于车辆在坡道和非坡道区域行驶时车辆俯仰角的不同,本发明实施例根据每一帧点云数据对应的车辆俯仰角与预设角度之间的关系,将各帧点云数据初步划分为坡道区域对应的第一点云数据和非坡道区域对应的第二点云数据。其中,坡道区域可通过第一点云数据对应的第一索引值范围来表示。本发明实施例为了使得各个第一索引值范围所覆盖的点云帧数据更加全面,通过对第一点云数据对应的每个第一索引值范围进行扩大处理,可使得坡道区域对应的点云数据的确定更加准确。
19、可选的,通过在该索引值范围两端位置分别增加若干个索引值,以将该第一索引值范围进行扩大,得到范围扩大后的目标索引值范围,包括:
20、按照该第一索引值范围中各索引值所对应的目标车辆高度信息之间的单调性,在该索引值范围两端位置分别增加符合所述单调性的索引值,以对该第一索引值范围进行扩大,得到范围扩大后的目标索引值范围,其中,所述单调性包括单调递增性或单调递减性。
21、可选的,按照该第一索引值范围中各索引值所对应的目标车辆高度信息之间的单调性,在该索引值范围两端位置分别增加符合所述单调性的索引值,以对该第一索引值范围进行扩大,得到范围扩大后的目标索引值范围,包括:
22、从该第一索引值范围中,确定坡道中间部位对应的中间索引值;
23、确定所述中间索引值对应的目标车辆高度信息与该第一索引值范围中其他索引值对应的目标车辆高度信息之间的各高度差绝对值;
24、根据车辆在坡道行驶过程中各高度差绝对值之间的单调递增性,确定在该第一索引值范围两端位置待增加的索引值;
25、按照索引值的大小关系,将待增加的索引值与原第一索引值范围中的索引值进行组合,以形成范围扩大后的目标索引值范围。
26、通过上述方案可知,本发明实施例根据目标车辆在坡道区域行驶时高度信息的单调递增性或单调递减性,在从初步划分的坡道区域对应的第一索引值范围中确定出与坡道中间部位对应的中间索引值后,通过确定出与中间索引值的高度信息之间的高程差符合该单调递增性的其他索引值,可对坡道区域对应的第一索引值的范围进行扩大处理,这样可使得扩大后的目标索引值范围能够对应一个完成的坡道区域,从而有效提高了坡道区域的确定精度。
27、可选的,车辆俯仰角为经过滤波处理后的车辆俯仰角。
28、通过上述方案可知,本发明实施例通过对车辆俯仰角进行滤波处理,解决车辆在行驶过程中存在微小抖动时所带来的干扰,提高了车辆俯仰角的准确性,从而使得后续坡道区域和非坡道区域的划分更加准确。
29、可选的,按照高度信息对非坡道区域划进行分层,包括:
30、从非坡道区域中确定平均高度信息相同的子区域,其中,每个子区域对应的点云帧数连续;
31、按照不同子区域的平均高度信息从大到小的顺序,将非坡道区域分为多层。
32、通过上述方案可知,考虑到高度不同的路面之间通常是通过坡道进行连通的,本发明实施例是先从待处理轨迹中确定出坡道区域,然后将待处理轨迹中剩下的区域确定为非坡道区域,并通过按照高度聚类算法将非坡道区域按照高度从高到低的顺序分为多层。相对于相关技术中对待处理轨迹进行平面拟合和分割的方式时,由于路面并非完全水平而容易导致将该路面拟合为多层的情况,本发明实施例在分层过程中,并不关注每层非坡道区域对应的路面是否水平,也无需考虑平面拟合时是否采用了其他平面的点云数据,本发明实施例提供的点云分层方案有效提高了点云数据分层的准确性。
33、可选的,确定目标车辆在采集各帧点云数据时相对于水平面的车辆俯仰角,包括:
34、基于车体坐标系与标准坐标系之间的相对关系,确定目标车辆在采集各帧点云数据时相对于水平面的车辆俯仰角,其中,车体坐标系为与车体固连的坐标系,标准坐标系为水平面对应的坐标系;或者,
35、基于惯性测量单元imu采集的数据,确定目标车辆在采集各帧点云数据时相对于水平面的车辆俯仰角;或者,
36、基于多传感器融合后的数据,确定目标车辆在采集各帧点云数据时相对于水平面的车辆俯仰角,其中,多传感器包括imu、gps、雷达和/或图像传感器。
37、第二方面,本发明实施例还提供了一种点云数据的分层装置,包括:
38、俯仰角确定模块,被配置为对于待处理轨迹对应的各帧点云数据,确定目标车辆在采集各帧点云数据时相对于水平面的车辆俯仰角,其中,所述标准坐标系用于表示水平面;
39、区域划分模块,被配置为根据各帧点云数据分别对应的车辆俯仰角之间的大小关系,将待处理轨迹划分为坡道区域和非坡道区域;
40、分层模块,被配置为按照高度信息对非坡道区域进行分层。
41、可选的,本发明实施例提供的装置还包括:
42、建图模块,被配置为在按照高度信息对非坡道区域进行分层之后,按照非坡道区域的分层结果,对不同层中的点云数据进行可视化显示,并生成不同层高度对应的平面,以用于创建各平面对应的地图。
43、可选的,区域划分模块,包括:
44、点云数据划分单元,被配置为在各帧点云数据中,将车辆俯仰角大于预设角度的俯仰角所对应的点云数据,作为目标车辆在上坡或下坡时的第一点云数据;
45、区域划分单元,被配置为将所有第一点云数据的集合所对应的待处理轨迹作为坡道区域,并将除第一点云数据之外的所有第二点云数据的集合所对应的待处理轨迹作为非坡道区域。
46、可选的,区域划分单元,包括:
47、索引值范围确定子单元,被配置为根据点云帧数索引值之间的连续性,将所有第一点云数据对应的点云帧数索引值划分为多个第一索引值范围,其中,第一索引值范围的个数用于表示目标车辆上坡或下坡的次数;
48、坡道区域确定子单元,被配置为对于任意一个第一索引值范围,通过在该索引值范围两端位置分别增加若干个索引值,以将该第一索引值范围进行扩大,得到范围扩大后的目标索引值范围,并将各目标索引值范围所对应的待处理轨迹分别作为坡道区域;
49、非坡道区域划分子单元,被配置为基于第一点云数据对应的多个目标索引值范围以及点云帧数索引值之间的连续性,将除第一点云数据之外的第二点云数据对应的点云帧数索引值划分为多个第二索引值范围,并将各第二索引值范围所对应的待处理轨迹分别作为非坡道区域。
50、可选的,坡道区域确定子单元,包括:
51、坡道区域确定组件,被配置为对于任意一个第一索引值范围,按照该第一索引值范围中各索引值所对应的目标车辆高度信息之间的单调性,在该索引值范围两端位置分别增加符合所述单调性的索引值,以对该第一索引值范围进行扩大,得到范围扩大后的目标索引值范围,并将各目标索引值范围所对应的待处理轨迹分别作为坡道区域;其中,单调性包括单调递增性或单调递减性。
52、可选的,坡道区域确定组件,具体被配置为:
53、对于任意一个第一索引值范围,从该第一索引值范围中,确定坡道中间部位对应的中间索引值;
54、确定中间索引值对应的目标车辆高度信息与该第一索引值范围中其他索引值对应的目标车辆高度信息之间的各高度差绝对值;
55、根据车辆在坡道行驶过程中各高度差绝对值之间的单调递增性,确定在该第一索引值范围两端位置待增加的索引值;
56、按照索引值的大小关系,将增加的索引值与原第一索引值范围中的索引值进行组合,以形成范围扩大后的目标索引值范围,并将各目标索引值范围所对应的待处理轨迹分别作为坡道区域。
57、可选的,车辆俯仰角为经过滤波处理后的车辆俯仰角。
58、可选的,分层模块,包括:
59、子区域确定单元,被配置为从非坡道区域中确定平均高度信息相同的子区域,其中,每个子区域对应的点云帧数索引值连续;
60、分层单元,被配置为按照不同子区域的平均高度信息从大到小的顺序,将非坡道区域分为多层。
61、可选的,俯仰角确定模块,具体被配置:
62、基于车体坐标系与标准坐标系之间的相对关系,确定目标车辆在采集各帧点云数据时相对于水平面的车辆俯仰角,其中,车体坐标系为与车体固连的坐标系,标准坐标系为水平面对应的坐标系;
63、基于惯性测量单元imu采集的数据,确定目标车辆在采集各帧点云数据时相对于水平面的车辆俯仰角;或者,
64、基于多传感器融合后的数据,确定目标车辆在采集各帧点云数据时相对于水平面的车辆俯仰角,其中,多传感器包括imu、gps、雷达和/或图像传感器。
65、第三方面,本发明实施例提供了一种存储介质,其上存储有计算机程序,所述程序被处理器执行时实现如第一方面任一实施方式所述的方法。
66、第四方面,本发明实施例提供了一种电子设备,所述电子设备包括:
67、一个或多个处理器;
68、存储装置,用于存储一个或多个程序,
69、当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现如第一方面任一实施方式所述的方法。
70、第五方面,本发明实施例提供了一种车辆,所述车辆包含如第二方面任一实施方式所述的装置,或者包含如第四方面所述的电子设备。
71、第六方面,本发明实施例提供了一种计算机程序,所述计算机程序包括程序指令,所述程序指令被计算机执行时实现如第一方面任一实施方式所述的方法。
- 还没有人留言评论。精彩留言会获得点赞!