近距离下服务航天器机动策略的规划方法
1.本发明属于航天器在轨服务自主规划领域,具体涉及“一对多”近距离交会中服务航天器机动策略规划方法。
背景技术:
2.随着人类探索深空宇宙的步伐不断加快,空间任务日益复杂。在轨服务的航天器需要有更加强大的任务规划能力。各国政府组织陆续开展了有关空间碎片清理、燃料加注、航天器维护等在轨服务方面的研究及实验。该领域上存在的巨大经济及军事价值已引起广泛关注。为节省成本,在轨服务往往采用“一对多”的服务模式,即一个服务航天器对应多个目标航天器。因此,在轨任务规划首先需要解决的问题就是如何确定服务航天器与各个目标间的交会机动策略。
3.服务航天器的机动规划一向是热门研究领域。规划任务需要同时考虑到燃料和时间,在两者间取得平衡。当涉及到多个目标航天器时,规划既要考虑交会次序和分配时间,又要考虑对各目标的最优轨迹,问题变得更加复杂。shen等人首先开展了共面圆轨道上的“一对多”最优交会问题,总结了最优交会顺序的规律。周洋等人采用一些遗传算法的改进算法进行了类似的研究。jing yu等人以地球静止轨道上的碎片清除为背景,通过混合最优控制解决交会顺序问题。另外,在轨迹优化方面,lawden首先基于庞德里亚金极小值原理提出了主矢量理论,确立了最优交会轨迹的必要条件。prussing给出了近距离线性交会下最优的脉冲个数,并提出了在固定时间内的最优2脉冲、3脉冲及4脉冲解析计算方法。arzelier等在此基础上提出一种混合迭代算法用以解决固定时间下的线性最优交会问题。
4.现有的“一对多”任务规划研究中,以远距离的非线性交会为主。制导方式普遍采用兰伯特转移,机动所需的燃料量远超过工程实际。随着航天领域的不断发展,针对相距较近的多个编队目标或者主星周围的多个环绕器进行依次服务的任务成为一类代表性的规划问题。传统的近距离制导方式难以克服轨道摄动等因素的影响,导致交会误差较大。此外,现有研究往往将目标规划与轨迹规划割裂开来,对每个目标都采用相同的制导方式,由此规划得到的机动策略难以实现最优性,也影响了交会制导的准确性。
技术实现要素:
5.本发明的目的是为解决现有的规划方案未考虑对单个目标的最优交会轨迹以及传统的近距离制导方式难以克服轨道摄动的影响,导致交会误差大的问题,而提出的一种近距离下服务航天器机动策略的规划方法。
6.本发明为解决上述技术问题所采取的技术方案是:
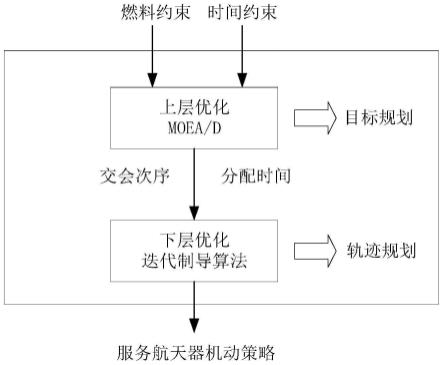
7.近距离下服务航天器机动策略的规划方法,所述方法以燃料消耗和任务总时间为规划指标设计了包含上层优化模型和下层优化模型的框架;
8.其中,上层优化模型的优化变量选择为交会次序和交会分配时间,即上层优化模型用于求解交会次序和对每个目标航天器的交会分配时间;下层优化模型又分解为内层和
外层,外层的优化变量选择为施加脉冲个数和脉冲施加时刻序列,即外层用于根据上层的优化结果求解施加脉冲个数和脉冲施加时刻序列,内层用于根据外层确定的施加脉冲个数和脉冲施加时刻序列优化无约束变量;
9.再根据求得的施加脉冲个数、脉冲施加时刻序列以及无约束变量进行交会制导,其具体过程为:
10.步骤1、建立基于脉冲推力作用下的服务航天器与目标航天器间的相对运动方程(cw方程),根据建立的相对运动方程求得在给定任务总时间、施加脉冲次数以及各次脉冲施加时刻下的脉冲速度增量的通解表达形式;
11.步骤2、根据各次脉冲速度求得在交会时刻下,服务航天器在目标航天器轨道系下的相对位置速度;
12.所述步骤2中,将求得的各次脉冲速度带入高精度轨道动力学方程中,通过数值法求解轨道微分方程,再求得在交会时刻下,服务航天器在目标航天器轨道系下的相对位置速度;
13.步骤3、根据步骤2中求得的相对位置速度以及步骤1中求得的脉冲速度增量通解表达形式调整服务航天器的各次脉冲速度;
14.步骤4、判断在每次迭代所获得的脉冲速度作用下,服务航天器与目标航天器的实际交会误差是否小于设定的阈值,若实际交会误差小于设定的阈值或迭代次数达到设置的上限,则停止迭代;否则重复执行步骤2至步骤3,直至满足迭代的停止条件。
15.本发明中,近距离是指百公里范围内。采用本发明的交会制导方式分别对每个目标航天器进行处理。
16.进一步地,所述上层优化模型为:
[0017][0018][0019][0020]
其中,x代表交会次序,x=[x
1 x2ꢀ…ꢀ
xn],t代表交会分配时间,t=[t
1 t2ꢀ…ꢀ
tn],n为目标航天器的个数,ti为与第i个目标航天器交会所用时间,m为由n个整数进行全排列得到的集合,δv
ij
为第i个目标航天器对应的第j次脉冲速度矢量,i=1,2,
…
,n,j=1,2,
…
,m,m为脉冲的总次数,f1(x,t)和f2(x,t)均为目标函数,δv
max
为速度增量的上界,t
max
为交会任务时间的上界。
[0021]
进一步地,所述上层优化模型采用基于分解的moea/d算法求解交会次序和对每个目标航天器的交会分配时间,算法的权值聚合方式选择为切比雪夫方法。
[0022]
进一步地,所述外层基于最优线性交会思想求解施加脉冲个数和脉冲施加时刻序列。
[0023]
进一步地,所述脉冲速度增量的通解表达形式为:
[0024]
δv
i+1
=δv
i-f-xi(t) i=1,2,
…
[0025]
式中,δvi=[δv
i,1 δv
i,2
ꢀ…ꢀ
δv
i,m
]
t
,δv
i,j
表示第i次迭代中,第j次脉冲的速度增量,f=[φv(t,t1) φv(t,t2) ... φv(t,tm)],t为交会总时间,tj为第j次脉冲的作用时刻相对开始时刻的时长,φ(t,tj)表示基于目标航天器轨道系下的相对位置速度从时刻tj到时刻t的状态转移矩阵,φ(t,tj)=[φr(t,tj) φv(t,tj)],φr(t,tj)为状态转移矩阵的前3列,φv(t,tj)为状态转移矩阵的后3列,f-表示f的广义逆矩阵,xi(t)为第i次迭代中脉冲速度增量为δvi时,交会时刻服务航天器与目标航天器实际的相对位置速度;
[0026]
迭代的初始值δv1的计算公式为:
[0027]
δv1=-f-(φ(t,t0)x(t0))+(i-f-f)ε
[0028]
其中,i为单位矩阵,ε为无约束变量,t0为开始时刻,x(t0)为开始时刻服务航天器与目标航天器的相对位置速度,φ(t,t0)表示基于目标航天器轨道系下的相对位置速度从开始时刻t0到时刻t的状态转移矩阵。
[0029]
进一步地,所述状态转移矩阵φ(t,t0)的表达式为:
[0030][0031]
其中,n
′
为目标航天器轨道角速度,τ=t-t0。
[0032]
进一步地,所述根据外层确定的施加脉冲个数和脉冲施加时刻序列优化无约束变量时采用的是序列二次规划方法(sqp)。
[0033]
进一步地,所述根据外层确定的施加脉冲个数和脉冲施加时刻序列优化无约束变量时,采用的优化初值为:
[0034]
f-=f
t
(ff
t
)-1 ε=0
[0035]
其中,ε为无约束变量,f
t
代表f的转置,(ff
t
)-1
代表ff
t
的逆。
[0036]
本发明的有益效果是:
[0037]
本发明方法以燃料消耗和任务总时间为规划指标,将目标规划和轨迹规划分成上下两层,设计了一种两层优化求解的方法框架。上层求解交会次序和分配时间,下层求解最优交会轨迹,通过在交会制导中设计迭代制导计算思路,以实现服务航天器对每个目标的精确交会,克服了交会的偏差。
[0038]
本发明方法的规划效率高,针对近距离交会任务具有普适性,同时能够克服轨道摄动以及建模误差对交会制导准确性的影响。
附图说明
[0039]
图1是本发明模型的框架图;
[0040]
图2为地心惯性系和目标轨道系的示意图;
[0041]
图3为基于迭代思想的近距离交会制导方法流程图;
[0042]
图4为本发明的交会偏差迭代收敛曲线图;
[0043]
图5为根据本发明的具体实施例得到交会轨迹示意图;
[0044]
图6为基于协态变量的最优交会轨迹迭代方法流程图;
[0045]
图7为最优交会服务航天器主矢量模值变化曲线图;
[0046]
图8为本发明的规划算法流程图;
[0047]
图9为根据本发明的具体实施例得到的pareto最优解集。
具体实施方式
[0048]
下面将参考附图进一步说明本发明的方法流程。
[0049]
如图2所示,本发明基于地心惯性系及交会目标的轨道系(lvlh)描述整个交会过程。地心惯性系以地球质心o为原点,ox指向春分点,oz指向北极点,oy指向根据右手螺旋定则确定。目标轨道系(lvlh)以交会目标质心o为原点,ox轴为地心指向航天器质心的方向,oy轴为航天器运动方向(位于轨道面内且垂直于ox轴),oz轴根据右手螺旋定则确定。
[0050]
如图1所示,本发明方法自下而上,构成了一套近距离交会规划的完整框架。以下将逐一介绍各部分。
[0051]
1、一种基于迭代思想的近距离交会制导方法
[0052]
根据服务航天器及目标航天器在地心惯性系下的万有引力公式,可推导出在给定脉冲序列下的cw相对运动方程。
[0053][0054]
式中,x=[r v]
t
表示服务航天器相对目标的位置速度,r表示相对位置,v表示相对速度,n
′
表示目标航天器轨道角速度。控制量u的表达式为:
[0055][0056]
m为脉冲个数,ti为脉冲作用时刻,δvi为第i个脉冲的速度增量。
[0057]
状态x随时间的表达式为:
[0058][0059]
φ(t,t0)为从t0到t的状态转移矩阵,根据该公式可推导出在给定脉冲个数以及脉冲施加时刻下,各次脉冲速度的表达式。
[0060]
δv=-f-(φ(t,t0)x(t0))+(i-f-f)ε
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0061]
f-表示f的广义逆矩阵。ε为任意3m
×
1的列向量。
[0062]
理想情况下,交会的最终时刻满足两星相对位置速度为零。
[0063]
φ(t,t0)x(t0)+fδv=0
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0064]
当两航天器距离较远,目标轨道非圆以及存在摄动时,cw相对运动方程不再完全成立,实际的相对位置速度可由以下非线性方程表示。
[0065]
g(x(t0),δv,t)=x(t)
ꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0066]
此时,实现交会的速度增量需要调整为则式(5)不再成立,方程的右端记为δ
[0067][0068]
由式(5),(6),(7)三式可得到实际的速度增量表达式为:
[0069][0070]
根据上式可构造一迭代方程:
[0071]
δv
i+1
=δv
i-f-xi(t) i=1,2,
…ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(9)
[0072]
xi(t)为第i次迭代中,速度脉冲为δvi,交会时刻两航天器实际的相对位置速度。该值可通过将所求得的速度增量转为惯性系下表示,并带入实际的轨道动力学模型进行轨道递推求解。经过多次迭代后,δvi收敛至两航天器相对位置速度达到零状态。图3为上述基于迭代思想的交会制导流程图,该方法能够在一定程度上解决由于两星距离较远,目标航天器轨道非圆等因素造成的交会偏差。
[0073]
图4为迭代过程中的交会误差的下降曲线。可以明显看到,基于迭代思想的交会制导能够快速将交会误差抑制到很低水平。图5对比了基于迭代思想的交会制导和直接由解析法得到的服务航天器交会轨迹。相比解析法得到的轨迹,基于迭代法的交会制导有更高的准确性。
[0074]
2、“一对多”近距离交会下层优化方法
[0075]
作为规划方法的下层优化,本发明在上述近距离交会制导方法的基础上,将一对一轨迹优化分解为内外两层,内层求解无约束变量ε,外层基于最优线性交会思想求解脉冲个数m和脉冲施加时刻序列t。
[0076]
其中,内层在外层确定变量m和t下优化ε,并通过本发明提出的基于迭代思想的近距离交会制导方法计算各次脉冲的速度增量,求得优化指标即交会所需的总速度增量。优化算法采用序列二次规划(sqp)。
[0077]
根据最优控制理论,定义哈密顿函数:
[0078]
h=λ
t
(ax+bu)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(10)
[0079]
式中λ=[λ
r λv]
t
,λv称为主矢量。系统协态方程为:
[0080][0081]
可以得到协态变量的状态转移矩阵满足:
[0082][0083]
式中φ为相对位置速度的状态转移矩阵。主矢量满足以下边界条件:
[0084][0085]
δv0,δvf分别为t0,tf时刻下的脉冲速度增量。由式(12),(13)可得协态变量的初值为:
[0086]
λ(t0)=[φ
r22-1
(t,t0)[λv(tf)-φ
r21
(t,t0)λv(t0)]λv(t0)]
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(14)
[0087]
由式(12),(13),(14)可得在给定速度脉冲后,任意时刻下的协态变量。线性最优交会轨迹的充分必要条件为:主矢量及其对时间的导数在交会时间内连续,同时主矢量的模值小于等于1。
[0088]
由式(4)可知,下层优化是一个关于脉冲个数m,脉冲时间时刻t=[t
1 t2ꢀ…ꢀ
tm]以及无约束变量ε的优化问题。本发明将其分解为内外两层。
[0089]
内层采用sqp求解在确定脉冲个数和施加时刻下的ε。为提升优化效率,本发明以式(4)的最小范数解为优化的初值,即满足:
[0090]
f-=f
+
=f
t
(ff
t
)-1 ε=0
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(15)
[0091]
外层采用基于协态变量的迭代算法,即通过调整脉冲个数和脉冲的施加时刻满足最优交会轨迹的条件。其步骤如下:
[0092]
步骤1、确定最大脉冲个数n:共面交会n=4,异面交会n=6。
[0093]
步骤2、令m=2,t=[t
0 tf],t0为初始时刻,tf为交会时刻。计算两脉冲交会下最大协态变量对应的时刻t
max
。
[0094]
步骤3、若已有脉冲的个数等于n转至步骤4,反之在最大协态变量处增加一中间脉冲并更新t
max
。
[0095]
步骤4、调整脉冲的施加时刻:选取t
max
左右最近的两个脉冲施加时刻ta,tb即ta《t
max
《tb。分别进行以下三条判断。
[0096]
若满足且将脉冲时刻ta移至t
max
处(ta≠t0),将脉冲时刻tb也移至t
max
处(tb≠tf)。
[0097]
若满足且将脉冲时刻ta移至t
max
处(ta≠t0)。
[0098]
若满足且将脉冲时刻tb移至t
max
处(tb≠tf)
[0099]
步骤5、协态变量最大值等于1时停止迭代,此时求得最优交会脉冲。
[0100]
图6为外层优化方法的流程图。在下层优化得到m,t,ε后,通过调用本发明提出的基于迭代思想的交会制导方法即可求得各次脉冲的速度增量。图7为协态变量在交会过程中的变化曲线,其满足最优脉冲机动的条件,即该方法能求得全局最优解。
[0101]
3、“一对多”近距离交会上层优化方法
[0102]
作为规划方法的上层优化,本发明将服务航天器与各目标航天器交会所需的总速度增量及时间作为优化的两个目标。采用基于分解的多目标规划算法moea/d进行求解。在
计算个体适应度时调用下层优化,求解给定时间下的最优交会轨迹。上层的优化变量为交会次序x=[x
1 x2ꢀ…ꢀ
xn]和交会分配时间t=[t
1 t2ꢀ…ꢀ
tn]。考虑存在n个目标航天器,速度增量和交会任务时间的上界分别为δv
max
,t
max
。优化模型为:
[0103][0104]
上层优化采用moea/d对该优化问题进行求解,优化步骤如下:
[0105]
步骤1、生成n个均匀权重向量{λ
1 λ2ꢀ…ꢀ
λn}。确定一个领域变量t,针对每个权值λi(i=1,
…
n),确定其t个相邻的权重变量其中每个权重变量对应的序号:pi={i
1 i2ꢀ…ꢀin
}。
[0106]
步骤2、随机生成一个规模为n的初始种群(i=1,
…
n)表示第i个个体。并计算每个个体的多个目标函数值。初始化参考点z=[z
1 z2ꢀ…ꢀ
zm],m为待优化的目标个数。
[0107]
步骤3、针对每个个体,依次从其对应集合pi(i=1,
…
n)中随机挑选两个个体序号。并由选中的两个个体进行交叉产生新个体。计算新个体的多个目标函数值,更新参考点z。
[0108]
步骤4、遍历pi(i=1,
…
n)中所有编号对应的个体,并由权重λi(i=1,
…
n)及相应的权值聚合方法,将多个优化目标转为单一优化目标,与新个体进行比较。不占优的个体将被新个体代替。
[0109]
步骤5、判断迭代次数是否达到设定上限,若满足则停止规划并输出种群,反之返回步骤3。
[0110]
其中,在步骤2,参考点的z的计算方式为
[0111][0112]
步骤3中,本发明采用了组合交叉算子生成新个体。交会次序由十进制进行编码。即将n个目标航天器从1开始依次编号,x的可取集合为n个自然数的全排列。交叉算子选择为pbx,以保证交叉后的个体交会次序不存在对个别目标的重复和遗漏。交会分配时间t由二进制进行编码,交叉方式采用传统的两点交叉。
[0113]
每生成一个新个体后,通过调用下层优化方法求得交会所需的各次速度增量,并判断该个体的总速度增量和时间是否超过了给定的上限δv
max
,t
max
。若超过上述界限则直接淘汰该个体,重新生成一个个体进行重复判断。
[0114]
步骤4中,本发明采用的权值聚合方式为切比雪夫方法,以适应可能存在的非凸pareto集情况。其表达式如下:
[0115][0116]y*
为得到的最优个体。
[0117]
图8为本发明的规划方法流程图。具体实施步骤为:
[0118]
首先设置最长交会时间:t=50000s,速度增量上限δv
max
=5km/s,服务航天器及目标航天器的初始轨道根数如表1所示:
[0119]
表1
[0120][0121]
初始种群个数为200,迭代次数50。
[0122]
图9为规划方法得到的pareto解集。集合中包括177个互不支配的解。
[0123]
表2为pareto解集中时间最优和燃料最优的机动策略对比,其余解的速度增量及交会时间均位于两者之间。
[0124]
表2
[0125]
[0126][0127]
本发明的上述算例仅为详细地说明本发明的计算模型和计算流程,而并非是对本发明的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动,这里无法对所有的实施方式予以穷举,凡是属于本发明的技术方案所引伸出的显而易见的变化或变动仍处于本发明的保护范围之列。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1