基于扩展随机游走和GIS先验的高分影像目标提取方法
基于扩展随机游走和gis先验的高分影像目标提取方法
技术领域
1.本发明涉及一种高分辨率影像目标提取方法,特别涉及一种基于扩展随机游走算法和gis形状先验指导的高分辨率影像目标提取方法。
背景技术:
2.基于gis轮廓约束的高分辨率影像线段重组方法提取建筑物,并用于高分辨率影像与gis数据精确配准,改正了二者数据间的位置不一致性;然而这种基于边缘线段重组的方法并不总是能够取得良好的效果;第一种情形是对于非直线边缘的建筑物和非人工地物的提取,这是因为基于线段重组的方法基础是被提取的地物边缘主要由直线段构成;第二种情形是gis多边形与高分辨率影像存在表现不一致,具体表现在两个方面:(1)gis数据经过了边界简化和地图综合处理,例如图29中,多个外观相近,功能相似的建筑物在gis数据中合并成一个多边形进行表示,连同建筑物之间的草地也一并合并在gis多边形中,这时gis多边形与影像中地物的轮廓表现出不一致性;(2)gis轮廓本身并不十分准确,存在着一定程度的误差,典型的就是由非专业人士采集和生产的gis数据,例如图30中,由于所采用的是vgi数据,导致表示湖泊的gis多边形中包括了一部分的植被和岸地。
3.针对在以上两种情形下,基于边缘线段重组的方法具有一定的局限性这一背景,本方案提出了一种基于分割对象和gis形状先验指导的高分辨率影像目标提取方法。我们采用了一种扩展随机游走算法,该算法在原始随机游走算法的基础上引入了gis先验信息,从高分辨率影像分割结果中提取感兴趣的目标对象,并构建成完整的目标地物。
技术实现要素:
4.本发明的目的旨在提供一种适用范围广、数据精度高、一致性高、实用性强的基于扩展随机游走算法和gis形状先验的高分辨率影像目标提取方法,以克服现有技术中的不足之处。
5.按此目的设计的一种基于扩展随机游走算法和gis形状先验的高分辨率影像目标提取方法,其特征在于:包括以下步骤:
6.a、对高分辨率遥感影像进行过分割:采用多分辨率分割(multi-resolution segmentation,mrs)方法,对高分辨率遥感影像进行过分割,得到过分割的影像对象;影像对象将要在步骤b和步骤c中用于前景和背景种子点的选取;
7.b、利用gis数据选取前景种子点:gis数据中每一个多边形都被看作先验信息,用于自动选取前景种子点;前景种子点将要在步骤d中进行增长,用于提取目标地物;
8.c、利用gis数据选取背景种子点:gis数据同时也可作为先验信息,用于为目标地物自动选取背景种子点;
9.d、利用包含形状先验和光谱先验的扩展随机游走算法提取目标地物:为每一个gis多边形,选取其周围缓冲区内的对象,并建立了一个有权无向图,有权无向图包括前景种子点和背景种子点这些已标记的结点、还包括表示未知类别影像对象的未标记结点;在
有权无向图的基础上,扩展的随机游走算法用于计算每个未标示影像对象属于每个前景和背景类别的概率,使得目标地物在整体上和gis数据形状最相似,而其内部光谱又具有同质性。
10.步骤b中,前景种子点的选取方法包括以下步骤:
11.(1)、利用gis数据选取初始前景种子点,并采用以下公式计算重叠度用于选取初始的前景种子点:
[0012][0013]
其中,vi代表一个影像对象,rj是gis数据中一个目标多边形,如果一个影像对象的重叠度超过了阈值tf,它将被加入到初始的前景种子集合st中;
[0014]
(2)、移除步骤(1)中不确定的前景种子点,将不满足以下公式的初始前景种子点进行移除:
[0015][0016]
其中,是影像对象vi在第l个波段上的平均光谱值,是所有初始的前景种子点在第l个波段上平均光谱值,δ
l
是集合st中初始前景种子点在第l个波段上光谱值标准差,l是高分影像中波段数目;
[0017]
(3)、通过步骤(1)和步骤(2)后,集合st中剩余的初始前景种子点若具有相似的光谱特性,则被用作目标对象的前景种子点。
[0018]
步骤c中,背景种子点的选取方法包括以下步骤:
[0019]
1)、利用gis选择初始的背景种子点,并采用以下公式计算重叠度用于选取初始的背景种子点:
[0020][0021]
其中,vi代表一个影像对象,rj是gis数据中一个目标多边形,如果一个影像对象与前景对象之间的重叠度小于阈值tb,它被看作初始的背景种子点,并加入到集合sb中;
[0022]
2)、聚类背景种子点,采用isodata算法对初始背景种子点进行聚类,以聚类成多个类别,每个类别都代表一类背景地物;
[0023]
3)、移除不可靠的背景种子点:为了保证每一个聚类中样本具有纯净性,利用正态分布统计移除那些严重偏离样本聚类中心的初始选取的背景样本,剩余的初始背景种子点被用作目标对象的背景种子点。
[0024]
步骤(d)中,选取的前景种子点标示为τ0,选取的背景种子点分别标示为τ1,τ2,
…
,τk,随机游走算法计算每个未标示影像对象分别属于τ0,τ1,
…
,τk每个类别的概率,属于前景类别τ0概率最大的影像对象将被最终标记为目标对象。
[0025]
步骤(d)中,形状先验是利用gis数据的形状先验信息和基于对象的方法,设计一种形状惩罚,并通过定义形状惩罚,并将形状惩罚加入到随机游走的能量函数中求解,形状先验就被纳入到了随机游走框架中,其中,形状惩罚的计算公式为:
[0026]
[0027]
其中,si是影像对象vi的面积归一化值,由的面积除以所有对象的最大面积求得,pi为影像对象vi属于前景类别的先验概率,xi为vi属于前景类别的概率。
[0028]
步骤(d)中,光谱先验是利用gis数据所选取的前景和背景种子点先验光谱信息,设计一个光谱先验能量函数,并将函数加入到原始随机游走能量函数中求解,光谱先验能量函数为:
[0029][0030]
其中,xs为一个n
×
1的矩阵,每一个元素表示结点vi属于类别标示τs的先验概率,n为总的结点的数目,∧q是一个对角阵,对角线上的元素为表示观测到vi的亮度值的概率密度函数值,x
st
为xs的转置矩阵,k为总的类别的数目,在只有前景和背景的条件下,k=2。
[0031]
步骤b中,每个前景种子点为一个影像对象。
[0032]
本发明的基于扩展随机游走算法以及gis数据形状先验指导的高分辨率影像目标提取方法,引入gis数据形状先验信息和高分辨率影像的光谱先验信息,从高分辨率影像分割结果中提取感兴趣的目标对象,并构建成完整的目标地物,由于充分利用了gis数据所提供的先验信息,取得了较好的目标提取效果,并且该方法克服了高分辨率影像与gis数据间表现不一致性的影响。
附图说明
[0033]
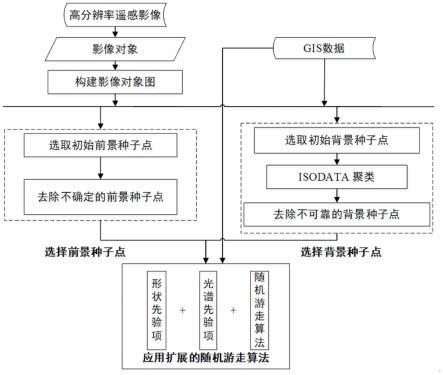
图1为本发明一实施例中高分辨率影像目标提取方法的流程图。
[0034]
图2为本发明一实施例中原始高分影像与gis数据的示意图。
[0035]
图3为本发明一实施例中过分割影像对象的示意图。
[0036]
图4为本发明一实施例中前景种子点选取的示意图。
[0037]
图5为本发明一实施例中经过聚类后具有不同类别的背景种子点的示意图。
[0038]
图6为本发明一实施例中直线上的随机游走模型的示意图。
[0039]
图7为本发明一实施例中具有不同类别标示(τ0,τ1,τ2)的三个种子点的示意图。
[0040]
图8为本发明一实施例中各结点属于τ0的概率的示意图。
[0041]
图9为本发明一实施例中各结点属于τ1的概率的示意图。
[0042]
图10为本发明一实施例中各结点属于τ2的概率的示意图。
[0043]
图11为本发明一实施例中基于对象的图的结构示意图。
[0044]
图12为本发明一实施例中quickbird影像的示意图。
[0045]
图13为本发明一实施例中原始gis数据与高分影像叠置的示意图。
[0046]
图14为本发明一实施例中配准后高分影像与gis数据叠置的示意图。
[0047]
图15为图14中各虚线框部分的放大结构示意图。
[0048]
图16为本发明一实施例中不同的聚类数目对应的实验结果评价精度的示意图。
[0049]
图17为本发明一实施例中不同的形状权重对应的实验结果评价精度的示意图。
[0050]
图18为本发明一实施例中不同的光谱权重对应的实验结果评价精度的示意图。
[0051]
图19为本发明一实施例中影像过分割结果的示意图。
[0052]
图20为本发明一实施例中每个对象属于前景类别的概率结果图。
[0053]
图21为本发明一实施例中扩展随机游走算法建筑物提取结果的示意图。
[0054]
图22为图21中各虚线框部分的放大效果图。
[0055]
图23为本发明一实施例中湖泊数据集中gis数据与quickbird影像叠置效果图。
[0056]
图24为本发明一实施例中利用扩展随机游走算法提取湖泊结果的示意图。
[0057]
图25为本发明一实施例中遮挡数据集1的建筑物被树木遮挡的示意图。
[0058]
图26为本发明一实施例中遮挡数据集1的建筑物提取结果的示意图。
[0059]
图27为本发明一实施例中遮挡数据集2及建筑物提取结果的示意图。
[0060]
图28为本发明一实施例中遮挡数据集3及建筑物提取结果的示意图。
[0061]
图29和图30为现有技术中高分影像与gis数据表现不一致的示意图。
具体实施方式
[0062]
下面结合附图及实施例对本发明作进一步描述。
[0063]
参见图1,本基于扩展随机游走和gis先验的高分影像目标提取方法,包括以下步骤:
[0064]
a、对高分辨率遥感影像进行过分割:采用多分辨率分割(multi-resolution segmentation,mrs)方法,对高分辨率遥感影像进行过分割,得到过分割的影像对象;影像对象将要在步骤b和步骤c中用于前景和背景种子点的选取;
[0065]
b、利用gis数据选取前景种子点:gis数据中每一个多边形都被看作先验信息,用于自动选取前景种子点(每个前景种子点为一个影像对象);前景种子点将要在步骤d中进行增长,用于提取目标地物;
[0066]
c、利用gis数据选取背景种子点:gis数据同时也可作为先验信息,用于为目标地物自动选取背景种子点;由于目标地物周围有多种背景地物类别,因此将背景种子点通过isodata算法聚类成多个类别,每个类别都代表一类背景地物;
[0067]
d、利用包含形状先验和光谱先验的扩展随机游走算法提取目标地物:为每一个gis多边形,选取其周围缓冲区内的对象,并建立了一个有权无向图(有权无向图的描述参见下面所说的“关于平面上的随机游走”),有权无向图包括前景种子点和背景种子点这些已标记的结点、还包括表示未知类别影像对象的未标记结点;在有权无向图的基础上,扩展的随机游走算法用于计算每个未标示影像对象属于每个前景和背景类别的概率,使得目标地物在整体上和gis数据形状最相似,而其内部光谱又具有同质性。
[0068]
基于扩展随机游走算法的目标提取方法
[0069]
图1展示了本章方法自动提取目标的主要流程及其相应的子流程。本方案提出的方法需要使用gis数据和高分影像,采用面向对象的扩展随机游走算法进行目标提取。首要步骤是对高分影像进行影像分割,采用了多分辨率分割(multi-resolution segmentation,mrs)方法,然而本章并不讨论分割尺度的选取方法,直接采用过分割的结果。目标提取包含以上的三个主要步骤。
[0070]
在随机游走算法中,需要指定大量前景种子点,通过增长得到整个目标地物。在步骤a中,利用gis数据自动选取前景种子点,前景种子点的选取方法包括以下步骤:
[0071]
(1)、利用gis数据选取初始前景种子点,gis数据可以提供目标地物的位置以及粗略的边界,因此采用以下公式计算重叠度用于选取初始的前景种子点:
[0072][0073]
其中,vi代表一个影像对象,rj是gis数据中一个目标多边形,∩表示两个多边形的公共区域,area(.)表示多边形的面积,如果一个影像对象的重叠度超过了阈值tf,它将被加入到初始的前景种子集合st中;
[0074]
(2)、移除步骤(1)中不确定的前景种子点;由于gis数据和高分影像之间存在表现不一致性,以及gis数据边界存在不准确性,通过重叠度获得的初始前景种子点集合中可能包含背景影像对象,因此具有一定的不确定性。为了保证选取的前景种子点具有较高的纯净性,需要移除那些不确定的种子点;假设前景种子点的光谱值分布遵循正态分布,那么不属于前景的影像对象具有较大概率落在正态分布曲线的两端;因此,只有满足以下公式的影像对象(即初始前景种子点)才被选作最终的前景种子点,即是将不满足以下公式的初始前景种子点进行移除:
[0075][0076]
其中,是影像对象vi在第l个波段上的平均光谱值,是所有初始的前景种子点在第l个波段上平均光谱值,δ
l
是集合st中初始前景种子点在第l个波段上光谱值标准差,l是高分影像中波段数目;
[0077]
(3)、通过步骤(1)和步骤(2)后,集合st中剩余的初始前景种子点若具有相似的光谱特性,则被用作目标对象的前景种子点。图2-图5显示了利用gis数据选取目标前景和背景种子点,其中,图2显示了原始高分影像与gis数据(湖周围所画的圈子),图3显示了过分割影像对象,图4显示了所选取的湖泊前景种子点,图5显示了经过聚类后具有不同类别的背景种子点;为了更加详尽地阐述本方案所提出的方法,本方案用一个简单的例子来进行说明;如图2-图5,本方案试图利用高分影像和gis数据(图2中湖周围所画的圈子)提取湖泊;高分影像已经经过mrs算法分割,得到过分割的影像对象(图3)。
[0078]
背景种子点代表了目标地物周围的背景地物,它们提供了局部的上下文信息,可以帮助识别目标地物,并且这些背景种子点可能属于不同的类别,因此,需要将这些背景种子点聚类成多组,每一组都有不同的类别标示;在本方案中,背景种子点的选取过程是通过前景gis多边形辅助自动完成的,步骤b中,背景种子点的选取方法包括以下步骤:
[0079]
1)、利用gis选择初始的背景种子点,并采用以下公式计算重叠度用于选取初始的背景种子点(跟选择初始的前景种子点的方式一样,也是通过影像对象与gis数据间的重叠度(公式1)选取的):
[0080][0081]
其中,vi代表一个影像对象,rj是gis数据中一个目标多边形,如果一个影像对象与前景对象之间的重叠度小于阈值tb,它被看作初始的背景种子点,并加入到集合sb中;
[0082]
2)、聚类背景种子点:由于背景种子点属于多个类别,采用isodata算法(bezdek,1980)对初始背景种子点进行聚类,以聚类成多个类别,每个类别都代表一类背景地物,该算法需要预先输入聚类数目n;
[0083]
3)、移除不可靠的背景种子点:上一步骤将背景种子点聚类成多个组,每一组分配一个类别标示,为了保证每一个聚类中样本具有纯净性,利用正态分布统计移除那些严重
偏离样本聚类中心的初始选取的背景样本,剩余的初始背景种子点被用作目标对象的背景种子点。
[0084]
图5显示了选取的背景样本。不同的颜色代表不同的背景类别。
[0085]
1、关于随机游走算法:
[0086]
随机游走理论最早由karl pearson于1905年提出。自从被提出起,随机游走理论被广泛地应用于物理、化学、经济学、计算机学等学科。许多现象都可以用随机游走过程来描述,例如布朗运动(即微粒在空气或液体中的扩散状况),交通拥挤状况,股票期货价格波动等。虽然这些过程并不完全随机,但是从一个过程转移到另外一个状态可以看作是随机的,因此随机游走过程也可以看作是马尔科夫过程,即下一状态只由上一状态决定。
[0087]
1.1、关于直线上的随机游走
[0088]
在一条直线上有n+1个点s={0,1,2,
…
n},如图6所示,假设一只跳蚤在这条直线上跳动,每一次跳动一个单位。当跳蚤在i点处时,下一刻其可能跳动到i-1或i+1处,其向左跳动到i-1的概率记为pi,向右跳动到i+1的概率记为1-pi。这一过程被称为贝努利随机游走。
[0089]
当跳蚤运动到0或者n处时停止,意味着随机游走过程停止。0和n被称为吸收壁,也被称为s的边界点。若用p(x)表示从x点出发,最终运动到n点的概率。那么p(x)应该满足以下条件:
[0090][0091]
若f为定义在整点集s上的函数,并且满足式(公式4),则称f为调和函数。上述的一维随机游走问题求解,可以转化为边界值为0和1的调和函数的求解。
[0092]
1.2、关于平面上的随机游走
[0093]
二维随机游走模型与一维随机游走模型的区别在于,二维随机游走模型的游走方向不再局限于两个方向,而是多个方向。2004年,leo grady首次将随机游走理论引入到二维图像分割领域(grady,2004)。根据grady的研究,图像的分割问题可以转换为平面上的随机游走问题。具体的思路如下,一幅图像可以映射为一个有权无向图g=(v,e)。其中每一个像素用一个结点v∈v表示,两个相邻的像素vi和vj(四邻域或八邻域)用边e
ij
连接,e
ij
的权重代表相邻像素的相似性。图7-图10(基于像素的随机游走示意图)显示了一个4
×
4的图,边的权值已经通过相邻像素的相似性计算得到,图中包含三个不同类别的种子点τ0,τ1和τ2,其它白色的结点都属于未标记的结点。假设将一个质点放在图7-10所示的图结构中任意一个结点上,质点可以每次在图中沿着边移动一个单位到其相邻的结点,并且方向是随机的,但是移动到相邻结点的概率与边权成正比。当质点运动到种子点处,随机游走过程停止。假设质点从图中任何一个结点处出发,最后到达各种子点的概率可以通过随机游走算法计算得到,这一概率也是未标记结点分别属于不同标记的概率。图8、图9、图10分别显示了未标记结点属于τ0,τ1和τ2的概率。并且每个结点属于τ0,τ1和τ2的概率和为1。根据属于τ0,τ1和τ2概率的大小,可以确定每个结点最终的标记结果。从图中可以看到,最终标记为τ0的结点是图8中用绿色标示的结点。
[0094]
本方案研究对象是高分辨率影像。高分辨率影像多采用面向对象的方法,即以分
割后的影像对象作为研究的基本单元,而不是像素。因此本文作的第一个改进便是将基于像素的图结构扩展成为基于对象的图结构。本章并不讨论分割尺度的问题,而是直接采用过分割的影像对象结果。和基于像素建立的图结构不同,在基于对象的图结构中,每一个结点代表一个影像对象,相邻的对象(共享一段边缘)用边连接,每个结点的相邻边的数目不再是固定的,而是变化的,边权值则代表两个相邻对象的相似性,可以用公式(3-2)计算。基于对象的图结构示例如图11所示。基于对象的随机游走与基于像素的随机游走基本原理一样。
[0095]wij
=exp(-β|i
i-ij|)(公式5)
[0096]
其中ii和ij分别是vi和vj的光谱向量,β为自由参数,可以根据影像调节。
[0097]
1.3、随机游走问题的数学求解
[0098]
随机游走问题的求解实际上就是在已知种子点标记值情况下,如何计算未标记结点属于各类别的概率。随机游走的概率求解是一个十分复杂的数学问题,并且计算量十分巨大。已经有文献(doyleandsnell,1984)证明随机游走的转移概率与联合dirichlet问题的解法相同。因此可以通过组合dirichlet来求解随机游走在图像分类过程中的概率值。dirichlet问题求解满足laplace方程:
[0099][0100]
以及边界条件γ的位势函数
[0101][0102]
满足laplace方程的二阶连续可导函数也称为调和函数。因此,dirichlet问题也可以表述为在域ω内找到一个满足边界条件γ的调和函数u(x,y)。为了找到这样的u(x,y),需要首先在图g中定义组合laplace矩阵l,其中l中的每一个元素定义为:
[0103][0104]
由上式可知l
ij
由顶点vi和vj共同确定,di表示顶点vi的度,w
ij
表示连接vi和vj的边的权重。假设结点的数目为n,则l为一个n
×
n的矩阵。
[0105]
在离散的图像对象中,随机游走算法的求解可以转化为使得如下定义的dirichlet积分公式最小化:
[0106][0107]
其中x是一个n
×
1矩阵,每一个元素表示一个结点vi属于标记τs的概率。
[0108]
图g中的结点v可以分为两类:已标记结点vm和未标记结点vu。如果将所有结点按照已标记和未标记来进行重新排列,那么laplacian矩阵l可以表示为:
[0109][0110]
x矩阵可以表示为:
[0111][0112]
其中xm为已标记的种子点的概率矩阵,是一个已知的矩阵。xu为一个未知待计算的矩阵。对每一个结点vj∈vm,假设其标识为yj,是与vj相对应的xm中的一个元素,它的值为:
[0113][0114]
τs为一个类别。因此(公式9)可以写作:
[0115][0116]
(公式13)中能量函数的最小值可以通过对xu求导并令导数等于0计算求得,求解的结果为:
[0117]
luxu=-b
t
xm(公式14)
[0118]
(公式14)具体的推导过程为(
①
原始随机游走算法的数学推导):
[0119][0120]
对xu求导
[0121][0122]
由于矩阵lm,b,lu均为对称矩阵,
[0123]
因此
[0124][0125]
因此
[0126][0127]
令导数等于0得
[0128][0129]
计算得到
[0130]
luxu=-b
t
xm[0131]
通过(公式14),每一个未标识结点vi∈vu属于每个类别τs∈γ的概率可以计算求得,并且满足
[0132][0133]
假设总共具有k个类别,总共需要求解k-1个线性方程,因为最后一个概率可以通过公式(公式15)求解而得。因此每个结点都可以计算其分别属于k个类别的概率,结点的类别由最大的概率决定。
[0134]
1.4、随机游走算法的特点
[0135]
随机游走算法是一种基于图论的方法,通过用户指定图中的种子点,借助dirichlet问题求解方法,计算出每个非种子点游走到各个种子结点的概率,并且将概率最大的种子结点的类别赋给该未标记的结点。通过以上对随机游走算法的描述,可以总结出随机游走算法具有以下的特点:
[0136]
(1)考虑了空间邻近关系。随机游走算法建立在一个有权无向图的基础上。图中存储了相邻对象的空间邻接关系,并且根据随机游走算法的计算原理,相邻(在图中用边连接)并且特征相似(连接边权值大)的对象更加倾向于具有相同的类别,这与地理学第一定律以及格式塔心理学原理(参考文献:chang,d.;nesbitt,k.v.;wilkins,k.2007.the gestalt principles of similarity and proximity apply to both the haptic and visual grouping of elements.in proc:auic 7 79-86等,2007)相符。而大部分的机器学习分类算法忽略了对象之间的空间邻近关系。
[0137]
(2)考虑了前景和背景信息。在利用随机游走算法进行目标识别时,需要指定种子点,这些种子点既包括感兴趣目标前景种子点,也包括背景种子点。因此随机游走算法同时考虑了前景和背景信息。
[0138]
(3)计算复杂度小。由公式14可以看到,随机游走算法的解是通过线性方程求得的,该算法无需迭代,计算效率高,并且对能量函数最小化求解是唯一的。
[0139]
(4)算法易于扩展和改进,纳入先验项。随机游走算法实际上是对(公式9)中的能量函数最小化求解。根据先验条件,可以十分方便地在能量函数中加入约束项,对新的整体能量函数进行最小化求解。随机游走算法的易扩展性也是我们采用这一算法的重要原因之一。
[0140]
2、关于包含形状先验和光谱先验的扩展随机游走算法
[0141]
步骤(d)中,选取的前景种子点标示为τ0,选取的背景种子点分别标示为τ1,τ2,
…
,τk,随机游走算法计算每个未标示影像对象分别属于τ0,τ1,
…
,τk每个类别的概率,属于前景类别τ0概率最大的影像对象将被最终标记为目标对象。从上面所述的关于随机游走算法中对随机游走算法原理的介绍可以看到,传统的随机游走算法仅仅利用相邻影像对象之间的特征相似性来计算未标示对象分别属于前景和背景类别的概率,然而并没有考虑目标对象整体与gis先验的整体形状相似度。也就是说gis数据的先验知识并没有得到充分地利用。为了克服这一缺点,本节扩展了原始的随机游走算法,在随机游走能量函数中同时加入了形状先验和光谱先验项。
[0142]
2.1、关于形状先验
[0143]
尽管原始的随机游走算法可以获得全局最优解,但是它容易受到噪声和遮挡的干扰,尤其是在复杂城市场景下。通过纳入形状先验,更多的限制信息包含在这个算法中,因此可以得到更加稳健的结果。形状先验指的是在进行分类之前,仅仅依靠gis多边形的几何形状和边界便可以确定影像对象类别。
[0144]
本方案将增加形状先验能量到原有的随机游走能量函数中。假设代表所有的影像对象,每个影像对象的先验类别通过计算影像对象与gis多边形之间的重叠度(公式1)来确定,如公式16所示。所有影像对象的先验类别可以用表示。
[0145][0146]
假设在没有任何形状先验的条件下,随机游走的解为其中xi是对象vi属于前景标示的概率。f和之间的形状先验应当满足以下的条件:(1)当影像对象的实际标示和它的先验标示相同时,形状距离应该最小;(2)当影像对象的实际标示和先验标示不同时,形状距离应该最大。基于这两个条件,我们定义了如下f和之间的形状函数:
[0147][0148]
其中si是影像对象vi的面积归一化值,由vi的面积除以所有对象的最大面积求得。
[0149]
已有的计算机视觉的研究中也有距离函数的定义和使用,例如,vu和manjunath(2008)将形状函数纳入到图割的算法当中。同已有的距离函数相比,公式17所定义的距离函数具有两个方面的特点:(1)后验概率xi从离散的二元值(即xi∈{0,1})扩展到连续的概率值(xi∈(0,1));(2)先验概率pi和后验概率xi都定义在影像对象上,而不是单个像素上,基于对象的方法可以减少gis数据边界不准确性所带来的影响。为了使公式17中的形状惩罚最小,无论pi取何值,xi会永远朝着pi值的方向移动。另外值得一提的是该形状函数对gis多边形形状没有严格要求,gis多边形不需要是简单形状甚至不需要是闭合形状。据笔者所知,本文也是第一次将形状模板和形状先验的概念从计算机视觉领域引入并且应用于遥感领域。
[0150]
通过定义形状惩罚(公式17),并将形状惩罚加入到随机游走的能量函数中,形状先验就被纳入到了随机游走框架中。
[0151][0152]
其中,si是影像对象vi的面积归一化值,由vi的面积除以所有对象的最大面积求得,pi为影像对象vi属于前景类别的先验概率,xi为vi属于前景类别的概率。
[0153]
将随机游走的能量函数与形状惩罚通过自由参数γ结合:
[0154][0155]
将(公式19)中的参数用矩阵表示,公式可以转化为:
[0156][0157]
其中s和p都是n
×
1的矩阵,si和pi分别是它们其中的元素,q也是一个n
×
1矩阵,其中每一个元素为si*pi。同样公式(3-19)中联合能量函数的最小值可以通过对xu求导并令导数等于0计算求得,求解的结果为:
[0158]
luxu=-b
t
x
m-γ(s
u-2qu)(公式21)
[0159]
其中su和pu是s和p矩阵中未标记结点区块。
[0160]
注意到(公式21)是原始的随机游走算法包含形状先验项后的改进。
[0161]
(公式21)具体的推导过程如下(包含形状先验项的随机游走算法数学推导):
[0162][0163]
式中q=(p1*s1…
pn*sn)
t
[0164]
对xu求导
[0165][0166]
令导数等于0得
[0167][0168]
计算得到
[0169]
luxu=-b
t
x
m-γ(s
u-2qu)
[0170]
2.2、关于光谱先验
[0171]
由前景和背景种子点信息可以确定不同类别地物在光谱特征空间中的分布。光谱先验指的是在随机游走分类之前,仅仅依靠不同地物在光谱特征中的分布便可以确定影像对象的类别。
[0172]
本节将增加光谱先验能量到原有的随机游走能量函数中。首先,依据前景和背景种子点信息,可以计算出每个类别在每个波段上的联合概率分布函数。事实上,根据给定样本点集合求解随机变量的分布函数问题是概率统计学中的一个基本问题。有两种方法解决这一问题,参数估计和非参数估计法。参数估计需要假定数据分布符合某种特定的形态,在目标函数中寻找假定模型的未知参数。然而实际情况常常与假定模型并不相符,因此非参数估计的方法应运而生。非参数估计方法又称为核密度估计方法,该方法不对数据分布加以假定,是一种从数据样本本身出发研究数据分布特征的方法。
[0173]
假设总共有c个种子点,在共b个波段上的光谱值用表示,其中指的是种子点ui在第l个波段上的光谱灰度值。并且在所有c个种子点中,标示为τs的种子点的数目为m。假设一个未标记结点vi,那么在类别标示τs前提下,基于高斯核函数估计,观测到vi的亮度值的概率密度函数值为:
[0174]
[0175]
其中表示结点vi在第l个波段上的光谱值,是第k个标记为τs的种子点在第l个波段上的光谱值,b是多光谱影像中波段数目,h
l
是每一个颜色波段上的parzen窗宽,已有的文献(sheikh,y.;shah,m.2005.bayesianmodelingofdynamicscenesforobjectdetection.ieeetransactionsonpatternanalysisandmachineintelligence,27:1778-1792)推荐的默认值为16。
[0176]
根据贝叶斯分布原理,结点vi属于类别标示τs的先验概率为:
[0177][0178]
式中k是总的类别的数目。
[0179]
(公式23)写成矢量的表示为:
[0180][0181]
其中λs是一个n
×
1的矩阵,其中每一个元素为∧q是一个对角阵,对角线上的元素分别为(公式24)是(公式25)所代表的光谱能量函数的最小值的解:
[0182][0183]
其中,xs为一个n
×
1的矩阵,每一个元素表示结点vi属于类别标示τs的先验概率,n为总的结点的数目,∧q是一个对角阵,对角线上的元素为表示观测到vi的亮度值的概率密度函数值,x
st
为xs的转置矩阵,k为总的类别的数目,在只有前景和背景的条件下,k=2。
[0184]
将随机游走的能量函数和光谱以及形状先验能量函数结合成一个总的能量函数,如下:
[0185]etotal
=e
spatial
+γe
shape
+μe
spec
(公式26)
[0186]
其中γ和μ分别是形状和光谱函数的权重。总的能量函数为:
[0187][0188]
同样(公式27)中联合能量函数的最小值可以通过对xu求导并令导数等于0计算求得,求解的结果为:
[0189][0190]
(公式28)具体的推导过程如下(包含形状先验项和光谱先验项的随机游走算法数学推导):
[0191]etotal
=e
spatial
+γe
shape
+μe
spec
=e
spa+shp
+μe
spec
[0192]
其中
[0193][0194]
已知
[0195][0196]
而
[0197][0198]
因此
[0199][0200]
令导数等于0得
[0201][0202]
计算得到
[0203][0204]
总结而言,在(公式28)中,lu和b
t
是laplace矩阵项,su和qu均由形状先验决定,而和则属于光谱先验项,均可由概率密度函数值确定,xm由已知的种子点确定。因此,通过(公式28),可以计算出每个未知结点vi∈vu属于每个类别τs的概率。每个未知结点的类别由最大概率所对应的类别确定。
[0205]
3、实验与分析
[0206]
实验目的是结合高空间分辨率影像和gis数据,对本方案所提出的扩展随机游走算法进行测试,对所提出方法的精度进行评价和分析,并与已有的方法进行比较。
[0207]
北京中关村数据集的建筑物提取实验
[0208]
3.1、数据介绍
[0209]
实验数据选取了北京市中关村地区一处建筑物密集分布的区域,数据集包括高分辨率影像与gis数据,如图12-图15(配准后的中关村建筑物数据集)所示。高分影像采用quickbird影像,如图12所示,这一数据非常具有代表性,从影像上可以看到,建筑物分布十分密集,并且屋顶的几何结构和外观的差异巨大。
[0210]
地理信息数据是同一区域建筑物专题数据,从openstreetmap网站上下载得到,是
一种自组织地理信息数据。需要说明的是,本方案所使用的高分影像与gis数据已经经过配准,二者数据之间由于生产投影方式不同而引起的变形和相对偏差已经最大程度地消除和改正。尽管如此,高分影像与gis数据仍然未能完全套合,从图14中方框内以及对应的图15中放大图可以证明。这是由于所使用的gis数据是自组织的地理信息数据,它由非专业的用户采集获得,因此gis数据本身并不十分精确。在实际中,高精度的gis数据难以获得,而vgi数据虽然精度并不十分高,但获取容易,成本低廉。而在一些情况下,对专题数据的位置精度和边界准确度具有较高的要求,例如分析景观格局对城市生态和气候影响时。以精度稍低的gis数据作为辅助数据,从高分影像上提取具有较高精度的专题数据,正是本章研究的意义和价值。
[0211]
3.2、关于目标提取精度评价
[0212]
对扩展随机游走算法目标提取精度的评价将通过比较该方法提取建筑物的结果和参照建筑物来进行。而参照建筑物由专家目视判读遥感影像并人工勾绘获得。由于本方案采用的是基于对象的目标提取方法,目标提取精度评价同时采用了基于像素和基于对象两种评价方法。对于基于像素的评价方法,所提取建筑物和参照建筑物进行了逐像素的对比,每个像素都属于以下四种情形之一(参考文献lee,d.s.;shan,j.;bethel,j.s.2003.class-guided building extraction from ikonos imagery.photogrammetric engineering and remote sensing,69:143-150)。
[0213]
true positive(tp):该像素在提取结果和参照数据中均属于目标地物。
[0214]
true negative(tn):该像素在提取结果和参照数据中均属于非目标地物。
[0215]
false positive(fp):该像素在提取结果中属于目标地物,而在参照数据中属于非目标地物。
[0216]
false negative(fn):该像素在提取结果中属于非目标地物,而在参照数据中属于目标地物。
[0217]
基于以上四个类别,定义了三个评价测度:完整度(completeness),也被称为生产者精度(参考文献song,w.,&haithcoat,t.l.(2005).development of comprehensive accuracy assessment indexes for building footprint extraction.ieee transactions on geoscience and remote sensing,43(2),402-404.),正确度(correctness),也被称为用户精度(参考文献foody,g.m.,&mathur,a.(2004).toward intelligent training of supervised image classifications:directing training data acquisition for svm classification.remote sensing of environment,93(1-2),107-117.),以及f1值,它将完整度和正确度两个指标结合成一个测度(ok,a.o.(2013).automated detection of buildings from single vhr multispectral images using shadow information and graph cuts.isprs journal of photogrammetry and remote sensing,86,21-40.)。这三个测度的计算如式(公式29)所示。
[0218]
[0219]
以上的三个测度也在基于对象的评价方法中使用,和基于像素的方法不同,基于对象的评价方法统计的是正确分类和错分的影像对象的数目。如果提取结果中一个被标记为前景的影像对象和参照数据中的前景多边形有超过60%的重叠度,该影像对象被看作是正确分类,否则被认为是错误分类。基于以上的定义,可以计算利用本章所提出的方法得到的目标提取结果基于像素和基于对象的完整度,正确度和f1值。
[0220]
3.3、参数选择与敏感性分析
[0221]
本方案所提出的方法需要使用到的参数及默认的参数值如表1所示。从表1中可以看出,扩展的随机游走算法中主要涉及5个参数,其中初始前景种子点阈值tf和初始背景种子点阈值tb分别设置为0.7和0.1,这两个阈值设置的较为宽泛,目的是为了避免遗漏选取可能的前景种子点和背景种子点。
[0222]
表1
ꢀ‑
扩展随机游走算法涉及的参数及默认值
[0223][0224]
为了评价其它的三个参数(即n,γ和μ)对本文所提出的方法产生的结果的影响,以及选取最佳的参数,本方案利用不同的参数值,进行了一系列的实验,并且采用上面所述的目标提取精度评价节中的方法对实验结果进行了基于像素和基于对象的评价,实验结果如图16-图18(不同参数设置对扩展随机游走算法实验结果的影响)所示。
[0225]
首先分析背景聚类数目对目标提取结果的影响(如图16),从图中可以看到,基于像素和基于对象的精度评价结果十分相似。从结果中可以看出,随着背景聚类数目的增加(n《5时),完整性和正确度都同时增加,而当n》5时,随着背景聚类数目继续增加,完整性和正确度都趋于稳定。然而随机游走算法的复杂度与背景聚类数目成正比,聚类数目越大,算法所需要的时间越长,因此n=5是一个比较合适的取值,既避免了较高的算法时间消耗,又同时保持了较高的f1值。
[0226]
其次分析γ和μ这两个参数对目标提取结果的影响。在本方案实验中,分别对γ和μ取值0.05,0.1,0.2,0.3,0.4,0.5,0.6,0.7,0.8。图17和图18分别反映了不同γ和μ取值对目标提取结果精度的影响。从图17中可以看出,不管是基于像素还是基于对象的评价方法,当γ《0.4时,f1值随着γ值的增加而增加,当γ值在0.4和0.5之间时,f1值达到最大。在图18中,最大的f1值在μ=0.3处取得。基于以上的分析,在本实验中将γ值和μ值分别设置为0.5和0.3。
[0227]
尽管通过上述实验分析,为本数据集找到了最佳的参数值。除此之外,根据作者经验,给出了形状和光谱权重值(γ和μ)设置的一般建议:在以下几种情形下,应当指定较大的形状权重:(i)被提取的目标地物被严重地遮挡;(ii)gis数据具有较高的可信度,即经过
位置不一致性改正处理后,gis数据的位置和边界信息都较为准确;(iii)目标地物内部光谱同质性小,而异质性大。相应地,在以上三种情形下,光谱先验权重值(μ)应当设定为相对较小值。
[0228]
3.4、实验结果与分析
[0229]
基于上述分析选取的最佳参数条件下,利用扩展随机游走算法对图12-图15数据集进行建筑物目标提取实验。图19-图22(利用扩展随机游走算法提取建筑物目标的中间和最终结果)展示了本方案所提出方法进行建筑物目标提取所产生的中间结果和最终结果。其中,图19展示了影像过分割的结果,图20展示了利用扩展随机游走算法生成的概率图,即每个影像对象属于前景类别的概率,图21展示了建筑物目标提取的最终结果,图22显示了图21中部分提取建筑物的放大结果。从图21和图22中可以看到,尽管部分建筑物与背景之间的反差极小,但建筑物目标提取的整体效果良好,提取目标的边界(图22)相比于gis多边形的边界(图15)更加准确。目视评判的结果已经足以证明扩展随机游走算法的有效性。除了目视评判外,本文还采用了定量的评价方法(目标提取精度评价),定量的结果通过将图21中目标提取结果同标准参照结果进行比较获得。表2展示了定量评价结果。从表2中可以看出,扩展随机游走算法得到的建筑物目标提取结果基于像素的评价结果为完整性,正确度和f1值分别为88.43%,87.51%和87.97%。而基于对象的评价结果显示完整性,正确度和f1值分别为88.14%,88.35%和88.25%。
[0230]
为了进一步证明扩展随机游走算法的有效性,针对上述同样的数据集采用两种已有的分类方法进行建筑物目标提取实验,并将结果与本文方法产生的结果作定量的对比。第一个实验是利用原始的随机游走算法进行建筑物目标提取,原始的随机游走算法中不包括形状先验和光谱先验项。第二个实验是利用随机森林算法进行分类,随机森林分类算法在已有的图像分类实验中(参考文献ma,l.,cheng,l.,li,m.,liu,y.,&ma,x.(2015).training set size,scale,and features in geographic object-based image analysis of very high resolution unmanned aerial vehicle imagery.isprs journal of photogrammetry and remote sensing,102,14-27.)证明具有良好的分类效果。为了确保对比具有公正性,在上述两个实验中,分割结果以及分类所使用的种子点完全相同。并且将上述两种方法的结果与参照数据进行比较,采用目标提取精度评价中同样的测度来定量评判结果的精度。原始随机游走算法和随机森林分类算法的定量精度评价结果仍然展示在表2中。从表2中可以看出,对于原始的随机游走算法,基于像素的完整性,正确度和f1值分别为79.02%,84.17%和81.51%,而基于对象的完整性,正确度和f1值分别为78.47%,83.20%和80.76%。对于随机森林算法,基于像素的完整性,正确度和f1值为65.84%,84.11%和73.86%,而基于对象的评价结果分别为66.63%,79.70%和72.58%。
[0231]
从以上结果可以看出,不管是基于像素还是基于对象的精度评价,扩展的随机游走算法均优于原始的随机游走算法和随机森林分类算法。同原始的随机游走算法相比,扩展的随机游走算法在基于像素和基于对象的f1值上分别提高了6.4%和7.5%。同随机森林分类方法相比,扩展的随机游走算法的基于像素和基于对象的f1值分别提高了14.1%和15.7%。
[0232]
为了证明本文所提出的扩展随机游走算法能够提高gis数据的精度,对本数据集中所使用的gis数据精度进行了定量的评价,评价结果仍然展示在表2中。从表2中可以看到
所使用的gis数据基于像素的完整性,正确度和f1值分别为78.25%,76.85%和77.55%。据此可以计算得到利用扩展的随机游走算法进行目标提取的结果相对于原始的gis数据,f1值精度提高了近10%,由此进一步证明了本文方法的有效性。
[0233]
表1
ꢀ‑
利用不同方法提取目标的定量评价结果比较
[0234][0235]
4、湖泊提取实验
[0236]
为了进一步验证本方案所提出的扩展随机游走算法,采用了另一组实验数据进行了湖泊提取实验来进一步验证。实验数据集如图22所示,影像数据仍然采用quickbird影像。从图22中可以看出,数据集中共包括8个湖泊,并且在湖泊的四周生长着一些植被和水藻,导致湖泊水体与背景之间的可区分度严重降低。本数据集中所采用的gis数据仍然是自组织地理信息数据,与高分影像套合并不准确,究其原因,除了自组织地理信息数据本身的不确定性外,另外一个原因是湖泊中水位的变化导致高分影像与gis数据边界出现不一致。
[0237]
针对上述的数据集,采用扩展的随机游走算法进行湖泊目标提取,提取结果如图24所示。对比图24和图23可以看到,提取湖泊的边界相对于gis数据边界准确度得到了极大地提升。除了目视判读外,对湖泊提取的结果还进行了定量化的评价,计算得到的基于像素的完整性,正确度和f1值分别为95.02%,96.33%和95.67%。定量的结果也验证了湖泊提取实验效果十分良好。
[0238]
5、被遮挡建筑物提取实验
[0239]
本方案所提出的扩展随机游走算法由于能够利用gis数据提供的先验信息,对高分影像上部分被遮挡的地物提取具有一定的有效性。为了证明这一点,实验采用了三个数据集来进一步进行测试。测试数据如图25-图28(利用扩展随机游走算法从被遮挡的数据集中提取建筑物的结果)所示,三个数据集分别显示在图25、图27、图28中。从图中可以看到,三个数据集中的建筑物均被树木或阴影严重遮挡。图中红色线段代表gis数据的边界,可以看到,gis数据与高分影像边界并不完全套合,存在一定的误差。
[0240]
遮挡数据集2和数据集3中建筑物均被阴影所遮挡,红色线段代表gis边缘,绿色线段代表通过扩展随机游走算法提取的建筑物目标轮廓。
[0241]
采用扩展随机游走算法分别从上述三个数据集中提取建筑物目标。如上述参数选择与敏感性分析中提到的,在目标地物被遮挡的情形下,应当设置相对较大的形状先验权重。因此,形状先验和光谱先验权重分别设置为γ=0.8,μ=0.1。图26、图27、图28中的绿色线段分别为上述三个数据集中建筑物提取的结果。从图中可以看到绿色线段所表示的建筑
物边缘相较于红色线段更加准确。尽管数据集中建筑物都不同程度地被遮挡,并且被遮挡的区域与周边环境十分相似,利用本方案所提出的方法可以获得较为准确的目标地物的边缘。这一实验证实了扩展随机游走算法在被遮挡的数据集中进行目标提取的适用性。
[0242]
本发明采用了一种基于扩展随机游走算法以及gis数据形状先验指导的高分辨率影像目标提取方法,方案采用了扩展的随机游走算法,引入gis数据形状先验信息和高分辨率影像的光谱先验信息,从高分辨率影像分割结果中提取感兴趣的目标对象,并构建成完整的目标地物,由于充分利用了gis数据所提供的先验信息,取得了较好的目标提取效果,并且该方法克服了高分辨率影像与gis数据间表现不一致性的影响。
[0243]
方案的重要贡献在于对原始的随机游走算法进行了改进,主要表现在以下几个方面:1)将原始的随机游走算法从基于像素的方法扩展为基于对象的方法,更加适合于高分辨率地物信息的提取;2)在原始随机算法基础上,引入了形状先验,利用gis数据的形状先验信息和基于对象的方法,设计了一种形状惩罚(公式18),并加入到原始随机游走能量函数中求解;3)在原始随机游走算法中,引入了光谱先验,利用gis数据所选取的前景和背景种子点先验光谱信息,设计了一个光谱先验能量函数(公式25),加入到原始随机游走能量函数中求解。
[0244]
利用本方案所提出的方法在不同的数据集上进行了验证,对实验结果进行了定性和定量的评价,并且与已有的方法进行了对比,评价结果如下:
[0245]
(1)利用扩展随机游走算法在北京中关村数据集上进行建筑物目标提取实验,基于像素和基于对象评价方法计算的f1值分别为87.97%和88.25%。同原始随机游走算法和随机森林算法结果进行了对比,结果表明本方案所提出的方法取得了最高的目标提取精度。并且扩展随机游走算法目标提取的精度显著高于原始gis数据的精度。
[0246]
(2)扩展随机游走算法在湖泊数据集上进行目标提取实验,定量的结果显示湖泊提取的完整性,正确度和f1值分别为95.02%,96.33%和95.67%,这一精度证明了扩展随机游走算法应用于湖泊目标提取中能够取得良好的效果。
[0247]
(3)利用扩展随机游走算法对被遮挡的建筑物数据集进行目标提取实验,目视结果显示建筑物被遮挡的部分能够被成功提取,并且边缘较原始的gis数据更加准确,证明了扩展随机游走算法能够适用于被遮挡地物的目标提取。
[0248]
上述为本发明的优选方案,显示和描述了本发明的基本原理、主要特征和本发明的优点。本领域的技术人员应该了解本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等同物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1