一种基于轮廓匹配的物体高度在线测量方法
1.本发明涉及视觉测量技术领域,尤其是一种基于轮廓匹配的物体高度在线测量方法。
背景技术:
2.对物体进行高度测量时,通常是人工采用卷尺、激光测距仪等测量仪器进行测量,由于测量时测量仪器摆放不垂直、待测物体中心位置选择不准确等问题导致此种测量方式测量精度低,且测量效率低、测量数据无法实时上传到网络,不易实现数据可追溯,产生数据孤岛。
3.随着计算机软硬件的发展,利用图像处理的方法测量场景中物体的高度已发展成计算机视觉测量的一个重要课题。目前,计算机视觉测量主要分为采用单幅图像测量的方法和采用多幅图像测量的方法两种。
4.针对单幅图像测量方法,申请号为201610244745.1的中国发明专利公开了一种基于图像处理的测量高度方法,在单幅图像中人工标记4条水平线,并测得其中3条水平线的实际高度,通过图像平面和世界坐标系之间的投影矩阵估计第4条水平线的实际高度,这种方法适用于地理位置相同或相近的大尺度物体,能有效降低实际测量难度,但这种方法的人工干预多、测量效率低,无法实现物体高度的自动测量。申请号为201811637965.6的中国发明专利公开了一种基于深度图像处理的物体尺寸测量方法,这种方法利用深度相机获得深度图像,在相机(镜头向下垂直安装)与载物台距离固定的情况下,可方便的获得规定区域内的物体高度,再根据小孔成像原理得到物体的长度和宽度。这种方法能够自动测量物体的尺寸,但由于需要固定相机和载物台(背景)的距离,此方法的应用场景受限。
5.多幅图像测量方法主要是通过相机的连续采样,根据二维图像和深度图像得到三维点云,重建场景的三维模型,得到物体的三维数据从而达到测量的目的。申请号为202010961451.7的中国发明专利利用rgbd相机对室内的场景进行连续采样,重建室内物体的三维模型,这种方法可以获得物体的位置和尺寸,但由于采样设备昂贵,且三维模型重建需要高性能计算机进行大量运算,难以实现在线处理,缺乏通用性。
技术实现要素:
6.为了克服现有技术中存在的上述问题,本发明提出一种基于轮廓匹配的物体高度在线测量方法。
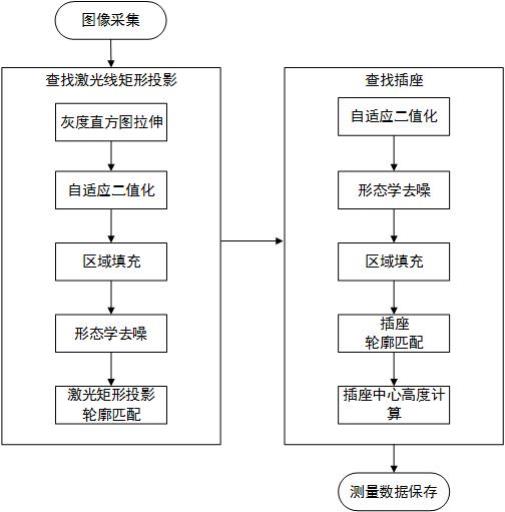
7.本发明解决其技术问题所采用的技术方案是:一种基于轮廓匹配的物体高度在线测量方法,包括如下步骤:步骤1,图像采集,将两个双线激光水平仪及相机固定在支架上,采集包含激光矩形投影的单幅图像;步骤2,查找激光矩形投影,通过灰度直方图拉伸、自适应二值化、区域填充、形态学去噪及激光矩形投影轮廓匹配五个步骤查找激光矩形投影轮廓;
步骤3,查找待测物体,结合步骤2的激光矩形投影轮廓,通过自适应二值化、形态学去噪、区域填充、待测物体轮廓匹配、待测物体中心高度计算五个步骤查找待测物体;步骤4,测量数据保存,将待测物体中心高度标记在图像上保存,并以表格的形式保存,同时提供网络接口,可将数据上传至服务器保存;其中所述步骤2中激光矩形投影轮廓匹配时,将激光矩形投影定义为平行四边形,具体实现步骤为:步骤2.1,初始化阈值n=0,采样率s=10%;步骤2.2,计算激光矩形投影轮廓对象的4条边的斜率,若两组对边斜率的差值不都等于n,排除当前轮廓对象,若两组对边斜率的差值均等于n,则进入步骤2.3;步骤2.3,根据s对激光矩形投影轮廓对象的四条边进行采样,分别计算4条边的采样斜率差,若不等于n,排除当前轮廓对象,若等于n,则轮廓匹配成功;步骤2.4,若满足条件的激光矩形投影轮廓对象数量等于0,则n+0.05,重新回到步骤2.2;如果满足条件的轮廓对象数量大于1,则s+10%,重新回到步骤2.2,直到满足条件的轮廓对象数量等于1;步骤2.5,计算图像斜率k,激光矩形投影轮廓上下边像素高度h1和h2,输出激光投影矩形轮廓对象z。
8.上述的一种基于轮廓匹配的物体高度在线测量方法,所述步骤2中形态学去噪的公式为:,其中,a为二值图像,b为图像形态学模板,分别代表形态学中的腐蚀运算和膨胀运算。
9.上述的一种基于轮廓匹配的物体高度在线测量方法,所述步骤2中进行自适应二值化操作时,前景色占比小于10%。
10.上述的一种基于轮廓匹配的物体高度在线测量方法,所述步骤3中进行自适应二值化操作时,前景色占比大于90%。
11.上述的一种基于轮廓匹配的物体高度在线测量方法,所述步骤3中待测物体轮廓匹配采用与步骤2中激光矩形投影轮廓匹配相同的方法获得轮廓对象:步骤3.1,计算待测物体轮廓的左右侧边的斜率,若左侧边斜率或右侧边斜率不等于图像斜率,则排除当前轮廓对象,若左侧边斜率和右侧边斜率等于图像斜率,则进入步骤3.2;步骤3.2,分别计算左侧边和右侧边的采样斜率,若采样斜率不等于图像斜率,则排除当前轮廓,若采样斜率等于图像斜率,则轮廓匹配成功。
12.上述的一种基于轮廓匹配的物体高度在线测量方法,所述步骤3中待测物体中心高度计算公式为:其中,h为待测物体在世界坐标系下的真实高度,lh1为激光矩形投影上水平线在世界坐标系下的真实高度,lh2为激光矩形投影下水平线在世界坐标系下的真实高度,h为插座顶点连线交点到激光矩形投影轮廓下边的像素高度,h1为激光矩形投影上水平线像素高度,h2为激光矩形投影下水平线像素高度。
13.本发明的有益效果是,本发明能够实现物体高度测量的自动化、在线化和网络化,避免数据孤岛的产生,不受相机与背景之间距离的限制,能够自动校正由于相机安装问题导致图像倾斜所带来的误差,实现物体高度测量的自动化、在线化和网络化,提高了物体高度测量的精度和效率;且本发明设备成本低,体积小,方便移动安装,适用性强。
附图说明
14.下面结合附图和实施例对本发明进一步说明。
15.图1为本发明实施例1流程图;图2为本发明实施例1中步骤2灰度直方图拉伸所得的图像;图3为本发明实施例1中步骤2自适应二值化所得图像;图4为本发明实施例1中步骤2区域填充后所得图像;图5为本发明实施例1中步骤2形态学去噪后所得图像;图6为本发明实施例1中步骤2激光矩形投影轮廓跟踪结果;图7为本发明实施例1中步骤2激光矩形投影轮廓匹配结果;图8为本发明实施例1中步骤2激光矩形投影轮廓匹配流程图;图9为本发明实施例1中步骤3自适应二值化所得图像;图10为本发明实施例1中步骤3形态学去噪后所得图像;图11为本发明实施例1中步骤3区域填充后所得图像;图12为本发明实施例1中步骤3插座轮廓匹配流程图;图13为本发明实施例1中步骤3插座匹配结果。
具体实施方式
16.为使本领域技术人员更好的理解本发明的技术方案,下面结合附图和具体实施方式对本发明作详细说明。
17.本实施例公开了在工程验收时,插座中心高度的测量方法,测量前,需要将两个双线激光水平仪固定在支架上,以激光线在墙上的矩形投影作为兴趣范围,将矩形薄片贴在待测插座上,测得激光矩形投影上水平线高度lh1,下水平线高度lh2。具体的测量步骤如图1所示:步骤1,图像采集,将相机固定在支架上,采集包含激光矩形投影的单幅图像;步骤2,查找激光矩形投影,通过灰度直方图拉伸、自适应二值化、区域填充、形态学去噪及激光矩形投影轮廓匹配五个步骤查找激光矩形投影轮廓;(1)灰度直方图拉伸中,滤波时,利用激光的颜色会保留较好的图像特征,在本实施例中使用图像的绿色分量进行灰度直方图拉伸,如图2所示。
18.(2)自适应二值化:为获得更为清晰的激光矩形投影,需要找到最佳二值化阈值,使得前景色占比小于10%,w(t)《0.1,通过迭代逼近得到满足条件t,将图像二值化,二值化后的图像如图3所示。
19.(3)区域填充:将二值化后的图像背景色填充为白色,前景色填充为黑色,填充后的图像如图4所示。
20.(4)形态学去噪:基于图像形态学的开运算,平滑图像的轮廓,消除狭窄的部分,去
掉细的突出,示例结果如图5所示,其公式为:,其中,a为二值图像,b为图像形态学模板,分别代表形态学中的腐蚀运算和膨胀运算。
21.(5)激光矩形投影轮廓匹配:设计轮廓类,该类适用于激光矩形投影和插座,主要包括12个属性(属性可以为空):轮廓序列p(x,y),左上点p1,右上点p2,左下点p3,右下点p4,上边序列l
12
(x,y),右边序列l
24
(x,y),下边序列l
43
(x,y),左边序列l
31
(x,y),图像斜率k,上边像素高度h1,下边像素高度h2。
22.利用八邻域链码跟踪法获取图像中前景色的轮廓序列,并将其实例化为轮廓对象,示例结果如图6所示,其中八邻域链码跟踪法在相关论文中已有记载,属于现有技术,在此不做赘述。
23.设计激光矩形投影轮廓匹配算法,匹配轮廓对象,匹配成功的轮廓即为激光矩形投影,示例结果如图7所示。在进行激光矩形投影轮廓匹配算法计算时,自动建立坐标系用以表示矩形投影轮廓的位置,可以以矩形投影轮廓某顶点为坐标系原点,也可以定义其他位置为坐标系原点,根据实际操作选择。
24.算法原理:激光投影为矩形,因采集的图像可能存在倾斜,算法将该投影定义为平行四边形,具体步骤如图8所示,包括:步骤2.1,初始化阈值n=0,采样率s=10%,建立坐标系定义原点位置;步骤2.2,计算轮廓对象的4条边的斜率,如果对边的斜率差不都等于阈值n,排除当前轮廓对象,若对边斜率差都等于阈值n,则进入步骤2.3;步骤2.3,根据s对激光矩形投影轮廓对象的四条边进行采样,分别计算4条边的采样斜率差,若不等于n,排除当前轮廓对象,若等于n,则轮廓匹配成功;采样斜率计算过程为:以初始采样率s=10%为例,即取10%的等间距采样点,将每条边平均分成10份,利用两点式计算每个线段的斜率,然后两两做差,如果每个斜率差均等于阈值n,则说明是一条直线,不是弧;步骤2.4,若满足条件的激光矩形投影轮廓对象数量等于0,则n+0.05,重新回到步骤2.2;如果满足条件的轮廓对象数量大于1,则s+10%,重新回到步骤2.2,直到满足条件的轮廓对象数量等于1;步骤2.5,计算图像斜率k,激光矩形投影轮廓上、下边像素高度h1和h2,输出激光投影矩形轮廓对象;其中,图像斜率k为轮廓左侧边的斜率。
25.步骤3,查找插座,结合步骤2的激光矩形投影轮廓,通过自适应二值化、形态学去噪、区域填充、插座轮廓匹配、插座中心高度计算五个步骤查找插座。
26.(1)自适应二值化:为获得更为清晰的插座,需要找到最佳二值化阈值,使得前景色占比大于90%,w(t)》0.9,通过迭代逼近得到满足条件的t,将图像二值化,所得图像如图9所示。
27.(2)形态学去噪:基于图像形态学的开运算,平滑图像的轮廓,消除狭窄的部分,去掉细的突出,示例结果如图10所示,其公式为:,其中,a为二值图像,b为图像形态学模板,分别代表形态学中的腐蚀运算和膨胀运算。
28.(3)区域填充:将形态学去噪所得图像背景色填充为白色,前景色填充为黑色,处理结果如图11所示。
29.(4)插座轮廓匹配:根据激光矩形投影轮廓对象自动限制查找范围,建立坐标系,具体步骤如图12所示,包括:步骤3.1,计算插座轮廓对象的左边斜率和右边斜率,如果左边斜率和右边斜率不都等于图像斜率,排除当前轮廓对象,若左边斜率和右边斜率都等于图像斜率,则进入步骤3.2;步骤3.2,分别计算插座轮廓对象左边和右边的采样斜率,若采样斜率不都等于图像斜率k,则排除当前轮廓,若采样斜率都等于图像斜率k,则轮廓匹配成功,最终匹配结果如图13所示。
30.(5)插座中心高度计算:计算插座中心的像素高度,并结合激光矩形投影上水平线和下水平线的像素高度和真实高度,根据投影映射原理,然后将其映射到世界坐标系下,得到插座中心的真实高度。
31.计算公式为:其中,h为待测物体在世界坐标系下的真实高度,lh1为激光矩形投影上水平线在世界坐标系下的真实高度,lh2为激光矩形投影下水平线在世界坐标系下的真实高度,h为插座顶点连线交点到激光矩形投影轮廓下边的像素高度,h1为激光矩形投影上水平线像素高度,h2为激光矩形投影下水平线像素高度。
32.步骤4,测量数据保存,将插座中心高度标记在图像上保存,并以表格的形式保存,同时提供网络接口,可将数据上传至服务器保存。
33.以上实施例仅为本发明的示例性实施例,不用于限制本发明,本发明的保护范围由权利要求书限定。本领域技术人员可以在本发明的实质和保护范围内,对本发明做出各种修改或等同替换,这种修改或等同替换也应视为落在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1