一种基于FPGA的云跟踪方法
一种基于fpga的云跟踪方法
技术领域
1.本发明涉及气象预测、地基云图研究相关技术领域,具体设计一种基于 fpga的云跟踪方法。
背景技术:
2.对于云层的研究,是有效缓解气候恶化的手段,对于云的研究可以帮助人 们了解其特性,提高气候预测能力,对生产活动进行相应的调整。特别地,对于 云状态变化的跟踪可以让我们获得更多关于气象方面的有效信息。
3.而现有技术中缺少可以准确、快速的进行云跟踪,尤其是针对云的形状变 化,与一般物体跟踪不同的是,云的形状会随时间的变化而变化,传统的目标检 测方法不能有效地实现准确的云跟踪,因此迫切的需要一种能够进行云团跟踪的 同时,又考虑到云团形状会改变这一特点的方法。
技术实现要素:
4.本发明的目的是针对现有技术存在的不足,提供一种基于fpga的云跟踪方 法。
5.技术方案:本发明解决问题所采用的技术方案为:
6.一种基于fpga的云跟踪方法,首先通过cmos线阵工业相机获取云团间隔 一段时间前后的图像一与图像二输入fpga,利用axi总线统一arm处理器与 fpga的数据交换,将图像处理算法、特征提取算法以及lstm-superglue网络 泛化到高性能arm处理器上。对所述图像进行畸变校正、图像平滑处理、形态 学操作、canny边缘检测以及提取矩特征,另一方面对所述图像提取灰度共生矩 阵特征量,将上述两种特征赋予适当的权重,作为总的云团特征。利用 lstm-superglue网络预测云团一段时间后的特征量状态,然后将上述特征量与 图像二进行匹配从而实现云跟踪。本发明考虑到云随时间大小会发生改变,并采 用多特征进行云跟踪,提高跟踪的准确性。同时考虑到不同类别的云团演变方式 不同,针对不同类别的云团分别训练预测模型。本发明采用“fpga+arm”体 系架构提高了图像采集的实时性、速度以及性能。
7.具体包括以下步骤:
8.s1:采集云团图像,对云团进行分类;
9.s2:对云团图像进行处理,获取云团特征:
10.一方面对图像进行畸变校正、图像平滑处理、形态学操作、canny边缘检测 以及提取矩特征,另一方面对所述图像提取灰度共生矩阵特征量,将矩特征和灰 度共生矩阵特征赋予适当的权重,作为总的云团特征。对图片中的云团部分设定 相关阈值,忽略较小的云,保留较大的、容易识别的云团;
11.s3:利用lstm-superglue网络预测云团一段时间后的特征量状态,然后将 特征量与图像二进行匹配从而实现云跟踪。
12.进一步地,步骤s1中,用同一相机拍摄间隔时间段的云团图像一与图像二, 采用
差分信号传输数据。
13.进一步地,步骤s1中,采集到的云团图像,还用于形成训练集,利用决策 树进行分类,并且对训练集中的云团图像也进行分类。
14.进一步地,步骤s2中,在相机采集到图像后,首先对云团图像进行畸变校 正,畸变校正算法的实现方式如下:
[0015][0016]
式中,{pi}为校正图像中所有的二维向量的集合;
[0017]
pi为第i个像素对应的像素坐标;
[0018]fk
为目标函数,通过使fk最小化,就可以求得最佳变换{p
i-best
};
[0019][0020]
式中,f1为针对云团部分进行的畸变校正;
[0021]
n为云团的个数;
[0022]on
为第n个云团的范围;
[0023]
wi为云团权重,云团处为1,其它为0;
[0024]
mi为像素i到图像中心的距离正相关的权重;
[0025]
ui为投影向量;
[0026]
sn,tn为云团图像变换的比例因子与缩放因子;
[0027]
(snui+tn)为云团的相似变换;
[0028][0029]
式中,f2为针对非云团部分(即背景部分)进行的畸变校正;
[0030]
vi,vj为云团图像校正后i,j两点的坐标;
[0031]
(v
i-vj)为云团图像校正后i,j两点间向量;
[0032]
n(i)为i映射到的校正后的图像区域;
[0033]eij
为非云团图像校正后i,j两点间的向量;
[0034]fk
=μf1+vf2[0035]
式中,μ,v为相关权重系数;
[0036]
通过使fk最小化,求出最佳的变换矩阵,将云团和非云团部分分别校正再进 行结合。
[0037]
进一步地,步骤s2中,利用特征提取算法,通过对矩特征和灰度共生矩阵 特征量的结合,获得表征能力强的特征量,矩特征包括空间矩、中心距、归一化 中心距和hu矩,灰度共生矩阵特征包括图像在0
°
,45
°
,90
°
,135
°
方向上 的能量、熵、对比度、逆差矩;特征结合的实现方式如下:
[0038]
v=αv1+βv2[0039]
式中,v1为矩特征;
[0040]
v2为灰度共生矩阵特征量;
[0041]
α,β为选取的合适的权重系数。
[0042]
进一步地,步骤s3中,将提取的特征输入lstm-superglue网络模型,网 络模型包括lstm和superglue两部分,lstm网络用于训练获得云团特征预测 模型,superglue网络用于特征匹配。
[0043]
进一步地,步骤s3中,利用lstm网络模型预测一段时间后云团特征变化 趋势,匹配图像二中的云团图像,训练获得云团特征预测模型;lstm网络输入 为云团图像一的特征量,输出为云团的特征量预测状态。
[0044]
进一步地,步骤s3中,
[0045]
将lstm的输出层作为superglue的输入层,在输入层后对关键点进行编码, 实现方式如下:
[0046]
xi=di+mlp(pi)
[0047]
式中,di为特征点的偏移量;
[0048]
mlp(pi)为将特征点pi利用mlp嵌入高维向量中;
[0049]
xi为pi映射在高维向量空间中的坐标;
[0050]
通过superglue网络,获得与云团图像二中匹配度最高的云团,即实现云跟 踪。
[0051]
有益效果:本发明与现有技术相比,具有以下优点:
[0052]
(1)本发明中采用“fpga+arm”体系架构提高了图像采集的实时性、速 度以及性能。相比于“arm+dsp”体系架构,“fpga+arm”体系架构将arm cortex-a57处理器和fpga可编程逻辑资源进行集成,具有硬件和软件均可重新 编程的特点,软硬件协同工作提高了设计的灵活性。
[0053]
(2)本发明中提出一种图像畸变校正方法,用于校正拍摄的图像,便于后 续进行特征提取,相对于传统相机镜头校正,本方法中采用云团和非云团部分分 别校正再进行结合。
[0054]
(3)本发明中针对每类云团分别训练相应的预测模型,相比于将所有云团 图像进行训练学习,有些云团的变化趋势可能会对神经网络的预测结果产生干扰, 分别训练预测模型可以避免该问题,从而提高预测模型的针对性和准确性。
[0055]
(4)本发明中为了获得有效的特征,采用矩特征和灰度共生矩阵特征结合 的方法,提高了输入特征的表征能力。
[0056]
(5)本发明采用lstm-superglue网络模型,结合了lstm和superglue 的优点,在能高效学习特征量变化趋势的同时,又能准确的进行特征匹配,实现 云跟踪效果。
[0057]
(6)本发明考虑到云随时间大小会发生改变,并采用多特征进行云跟踪, 提高跟踪的准确性。
附图说明
[0058]
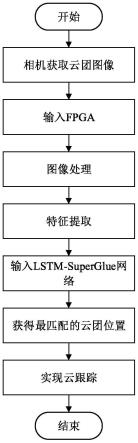
图1为本发明流程框图。
[0059]
图2为本发明的具体流程图;
[0060]
图3为图像处理流程图;
[0061]
图4为lstm-superglue网络模型图。
具体实施方式
[0062]
下面结合附图和具体实施例,进一步阐明本发明,本实施例在以本发明技术 方案为前提下进行实施,应理解这些实施例仅用于说明本发明而不用于限制本发 明的范围。
[0063]
一种基于fpga的云跟踪方法,如图1和2所示,包括以下步骤:
[0064]
s1:采集云团图像,对云团进行分类:
[0065]
本发明利用带有cameralink接口的cmos线阵工业相机进行图像采集。用 同一相机拍摄间隔时间段的进行每类云团的图像采集;针对不同云团种类,分别 进行图像采集。根据云的颜色、纹理和物理变化等特性,将地基云图划分为卷云、 积云、积雨云、层云4类。卷云是一种散在云层中的云,呈线状结构,光泽柔和, 云体通常是白的,没有阴影。卷云大多以微小的冰晶形式出现,通常不厚,不细, 不散。积云顶部呈弧形或拱形,云层底部几乎水平,云体有明确的边界。积雨云 云层较厚且蔓延范围较大,在垂直方向发展迅速。云顶是由冰晶组成,具有白色 丝质光泽的丝质结构。云底阴暗混乱,起伏明显。层云的云体是呈层钩状的,颜 色为灰色,常在山坡上出现,主要由小水珠构成。
[0066]
相机采用带有cameralink接口的cmos线阵工业相机,针对每类云团间隔 适当时间,用同一相机拍摄,保证一天,甚至一年中每天的各个时刻都有采集样 本。用相机采集高分辨率云团图像,用同一相机拍摄间隔时间段的云团图像一与 图像二,采用差分信号传输数据。间隔时间段不宜较长,防止云团状态发生巨大 变化,也不宜较短,选取适当的时间段拍摄图片,保证后续的神经网络能学习到 完整的云团变化过程。
[0067]
云团分类算法:采集到的云团图像,还用于形成训练集,利用决策树进行分 类,并且对训练集中的云团图像也进行分类。
[0068]
网络模型中的lstm部分,针对每类云团图像训练各自的预测模型,可以 提高预测的针对性和准确率,网络输入为云团图像一的特征量,输出为云团的特 征量预测状态。
[0069]
s2:对云团图像进行处理,获取云团特征;
[0070]
本发明中利用带有cameralink接口、cortex-a57处理器的fpga,用于进行 图像处理,获取云团特征;带有cameralink接口、cortex-a57处理器的fpga, 具有高性能的处理运算能力以及带有大容量的ddr单元储存图像数据,通过axi总线统一arm处理器与fpga的数据交换,将算法程序泛化到高性能arm 处理器上,同时能够进行图像并行处理,提高了实际应用中的效率问题。图像源 产生的lvds串行高速图像信号经过cameralink芯片ds90cr286mtd后,按照 cameralink接口协议转换成并行ttl信号,并将ttl信号输入至fpga接口。 fpga在pl端进行采集与控制,在此过程中pl端将通过axi总线将图像数据 存储到ddr中,ps端在接收到图像中断信号时开始读取ddr中的图像数据。 在获取相机采集的图像后,传输给fpga,随后进行图像处理操作。
[0071]
如图3所示,图像处理算法包括畸变校正、图像平滑处理、形态学操作、 canny边缘检测,通过畸变校正算法去除图像中的畸变失真部分,并通过噪声滤 波、边缘检测识别出云团的轮廓;能识别拍摄到图片中的云团部分设定相关阈值, 忽略较小的云,保留较大的、容易识别的云团。对云团图像进行处理的方法具体 步骤包括:
[0072]
s2-1:读取云团图像;
[0073]
s2-2:进行畸变校正;
[0074]
在相机采集到图像后,首先对云团图像进行畸变校正,畸变校正算法的实现 方式
如下:
[0075][0076]
式中,{pi}为校正图像中所有的二维向量的集合;
[0077]
pi为第i个像素对应的像素坐标;
[0078]fk
为目标函数,通过使fk最小化,就可以求得最佳变换{p
i-best
};
[0079][0080]
式中,f1为针对云团部分进行的畸变校正;
[0081]
n为云团的个数;
[0082]on
为第n个云团的范围;
[0083]
wi为云团权重,云团处为1,其它为0;
[0084]
mi为像素i到图像中心的距离正相关的权重;
[0085]
ui为投影向量;
[0086]
sn,tn为云团图像变换的比例因子与缩放因子;
[0087]
(snui+tn)为云团的相似变换;
[0088][0089]
式中,f2为针对非云团部分(即背景部分)进行的畸变校正;
[0090]
vi,vj为云团图像校正后i,j两点的坐标;
[0091]
(v
i-vj)为云团图像校正后i,j两点间向量;
[0092]
n(i)为i映射到的校正后的图像区域;
[0093]eij
为非云团图像校正后i,j两点间的向量;
[0094]fk
=μf1+vf2[0095]
式中,μ,v为相关权重系数;
[0096]
通过使fk最小化,就可以求出最佳的变换矩阵。本发明将云团和非云团部分 分别校正再进行结合,有效地改善图片效果。
[0097]
s2-3:然后,对矫正过的图像进行平滑处理,平滑处理包括高斯滤波;
[0098]
s2-4:再进行形态学操作,形态学操作包括开运算;
[0099]
s2-5:最后进行图像的canny边缘检测,canny边缘检测包括去噪、计算梯 度的幅度与方向、非极大值抑制、确定边缘,最后划分出云团的范围。
[0100]
利用特征提取算法,通过对矩特征和灰度共生矩阵特征量结合的方法,获得 表征能力更强的特征量。矩特征包括空间矩、中心距、归一化中心距和hu矩。 灰度共生矩阵特征包括图像在0
°
,45
°
,90
°
,135
°
方向上的能量、熵、对 比度、逆差矩。特征结合的实现方式如下:
[0101]
v=αv1+βv2[0102]
式中,v1为矩特征;
[0103]
v2为灰度共生矩阵特征量;
[0104]
α,β为选取的合适的权重系数。
[0105]
s3:如图4所示,将提取的特征输入lstm-superglue网络模型,网络模型 包括lstm和superglue两部分。lstm网络用于训练获得云团特征预测模型, superglue网络用于特征匹配。
[0106]
s3-1:利用lstm网络模型预测一段时间后云团特征变化趋势,匹配图像二 中的云团图像,训练获得云团特征预测模型;
[0107]
利用所述网络模型中的lstm部分,针对每类云团图像训练各自的预测模 型,可以提高预测的针对性和准确率,网络输入为云团图像一的特征量,输出为 云团的特征量预测状态。
[0108]
s3-2:利用superglue网络实现特征匹配。
[0109]
特征匹配是通过求解可微分最优化转移问题来解决,损失函数由gnn来构 建。将lstm的输出层作为superglue的输入层,在输入层后对关键点进行编码, 实现方式如下:
[0110]
xi=di+mlp(pi)
[0111]
式中,di为特征点的偏移量;
[0112]
mlp(pi)为将特征点pi利用mlp嵌入高维向量中;
[0113]
xi为pi映射在高维向量空间中的坐标。
[0114]
通过superglue网络,获得与云团图像二中匹配度最高的云团,即实现云跟 踪效果。
[0115]
本发明中采用“fpga+arm”体系架构提高了图像采集的实时性、速度以 及性能。将arm cortex-a57处理器和fpga可编程逻辑资源进行集成,具有硬 件和软件均可重新编程的特点,软硬件协同工作提高了设计的灵活性。
[0116]
采用本发明中提出一种图像畸变校正方法,相对于传统相机镜头校正,能实 现的校正效果更好。本发明中针对每类云团分别训练相应的预测模型,相比于将 所有云团图像进行训练学习,提高了预测模型的针对性和准确性。本发明中将矩 特征和灰度共生矩阵特征结合作为总特征,提高了输入特征的表征能力。利用本 发明采用的lstm-superglue网络模型,结合了lstm和superglue的优点,在 能高效学习特征量变化趋势的同时,又能准确的进行特征匹配,实现云跟踪效果。 从而提高气候预测能力,对人们生产活动进行相应的调整。
[0117]
上述具体实施方式只是本发明的一个优选实施例,并不是用来限制本发明的 实施与权利要求范围的,凡依据本发明申请专利保护范围内容做出的等效变化和 修饰,均应包括于本发明专利申请范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1