一种基于激光雷达的跨江输电线防船舶碰撞方法
1.本发明涉及跨江输电线安全保障的技术领域,尤其是指一种基于激光雷达的跨江输电线防船舶碰撞方法。
背景技术:
2.由于跨江输电线净高有限、夜间航行能见度低、船舶驾驶员错误判高,以及船舶未按操作要求降低吊臂等因素,极易发生船舶在航行过程中与跨江输电线碰撞的事故,造成损坏事件发生,严重影响电网安全可靠供电。因此,为降低主客观因素造成的船舶航行风险,进一步保障跨江输电线的安全,降低碰撞事故的发生,跨江输电线防船舶碰撞技术尤为重要。
3.现有船舶防碰撞检测主要采用基于机器视觉的检测技术,通过拍摄得到的图像数据进行处理检测船舶位置和高度,检测效果不可避免地受到图像质量、外界环境等因素的影响,并且该方法不适用于夜间环境,实时性差,存在很大程度的局限性。激光雷达在目标检测领域应用广泛,取得了较好的效果,具有抗干扰能力强、分辨率高、不受光线影响等优点,在夜间环境下也能够正常运行。
技术实现要素:
4.本发明的目的在于克服现有技术的缺点与不足,提出了一种基于激光雷达的跨江输电线防船舶碰撞方法,可有效解决现有基于机器视觉的检测技术存在的缺点及在夜间环境下对目标船舶检测效果不佳的问题。
5.为实现上述目的,本发明所提供的技术方案为:一种基于激光雷达的跨江输电线防船舶碰撞方法,包括以下步骤:
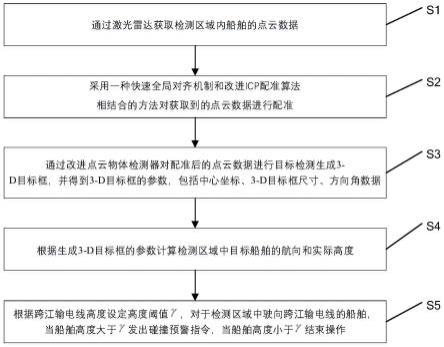
6.s1、通过激光雷达获取检测区域内船舶的点云数据;
7.s2、采用一种快速全局对齐机制和改进icp配准算法(迭代最近点配准算法)相结合的方法对步骤s1获取到的点云数据进行配准,具体操作是:首先,通过快速全局对齐机制求解目标函数得到最佳初始变换矩阵进行初始配准,其次采用点到平面距离公式将icp配准算法非线性问题近似转化为线性问题,迭代求解点云数据刚性变换矩阵进行精细配准;
8.s3、通过改进点云物体检测器对配准后的点云数据进行目标检测生成3-d目标框,并得到3-d目标框的参数,包括中心坐标、3-d目标框尺寸和方向角数据;其中,所述改进点云物体检测器是在cia-ssd(confident iou-aware single-stage object detector)的基础上,通过叠加设计的轻量化残差模块构建空间语义特征聚合模块ssfa module(spatial semantic feature aggregation module)中的空间卷积组和语义卷积组,并且对分类回归进行优化;
9.s4、根据步骤s3生成的3-d目标框的参数计算检测区域中目标船舶的航向和实际高度;
10.s5、根据跨江输电线高度设定高度阈值γ,对于检测区域中驶向跨江输电线的船
舶,当船舶高度大于γ发出碰撞预警指令,当船舶高度小于γ结束操作。
11.进一步,在步骤s1中,所述激光雷达通过安装平台以固定的俯仰角分别安装在江两岸输电塔特定高度的跟踪架上,保证扫描范围能够覆盖检测区域,检测区域为临近跨江输电线的限高区域;根据船舶的航行航道,一个激光雷达用于扫描获取船舶的主要点云数据,另一个激光雷达用于扫描进行点云数据补全,避免由于点云数据稀疏造成的船舶高度计算误差。
12.进一步,在步骤s2中,首先,对点云数据进行初始配准,对于任意两组点云数据集x和y建立匹配点对集:
13.k={(x,y)|x∈x,y∈y}
14.式中,x表示点云数据集x中的点云数据,y表示点云数据集y中的点云数据;通过匹配点对集k构建刚性变换矩阵t,使得两组点云数据之间的欧氏距离最小化;
15.为了生成匹配点对集k,使用快速点特征直方图(fast point feature histogram,fpfh)计算点云数据集x的特征直方图f(x)={f(x):x∈x}和点云数据集y的特征直方图f(y)={f(y):y∈y},提取点云的区域特征;
16.对于点云数据集x和y的特征直方图采用互相估计方法,当f(x)是f(x)中f(y)的最邻近,f(y)是f(y)中f(x)的最邻近时,将满足此关系的所有(x,y)添加到最邻近点集k1中,从最邻近点集k1中随机选择点云数据利用以下公式检查两者间的相似性:
[0017][0018]
式中,τ表示阈值,(xi,yi)、(xj,yj)表示满足最邻近关系的匹配点对,其中i≠j;当满足该条件时,将点云数据添加到匹配点对集k中;对于匹配点对集k,构造的目标函数e(t)如下:
[0019][0020]
通过稳健统计与线性过程相结合的方法搜索大距离的对应点作为失效的错误点,根据建立的匹配点对集k计算线性过程权重l={l
x,y
},式中,l
x,y
为计算得到的权重值,构造的目标函数e(t,l)如下:
[0021][0022]
式中,μ为超参数控制目标函数中残差的权重;当e(t,l)对l
x,y
求导等于0时,目标函数e(t,l)取得最小值,求得:
[0023][0024]
从而获得最佳初始变换状态完成初始配准;
[0025]
再采用改进icp配准算法进行精细配准获得高精度配准效果,包括以下改进:
[0026]
将非线性问题通过点到平面的距离函数近似转化为线性问题,获得更快的收敛速度;
[0027]
为消除初始配准过程中存在的错误对应点,首先匹配点对通过k-means指定最大
的聚类,以消除部分错误的对应点,再使用拆分方法,当发现错误的对应点,采用欧几里德距离和标准相结合的判断方法,精细地消除配对偏离;
[0028]
在k-d树邻近搜索方法的基础上,加入了超时响应机制,当邻近范围内所有点云数据都被遍历,或者搜索超过设置的时间阈值时,当前最佳结果被用作最近点。
[0029]
进一步,在步骤s3中,所述改进点云物体检测器在cia-ssd的基础上,通过叠加设计的轻量化残差模块构建ssfa module中的空间卷积组和语义卷积组,减少内存占用从而实现轻量化;为方便后续的高度判定,对分类回归进行优化,提高检测结果的可靠性;其中,所述ssfa module的具体情况如下:
[0030]
轻量化残差模块是将残差模块中标准的卷积(conv)替换为逐通道卷积(dwconv)和逐点卷积(pwconv),通过堆叠多个轻量化残差模块构建空间卷积组和语义卷积组;
[0031]
通过空间卷积组保持与稀疏卷积组输出的bev(bird's eye view)特征图一样大小的输出和维度,避免空间信息的丢失;
[0032]
将空间卷积组的输出特征作为输入,通过语义卷积组增加通道数,减小特征大小,获得更高层次的抽象语义信息;
[0033]
通过反卷积层(deconv)恢复语义卷积组输出特征的维度使其与空间卷积组的输出特征维度相同,并生成上采样语义特征;
[0034]
将两个卷积组产生的特征输入到注意力融合机制中进行自适应特征融合,得到具有丰富空间信息和语义信息的特征,使得生成的3-d目标框和目标分类的置信度更加精准;
[0035]
使用logsoftmax函数代替softmax函数计算类别概率分布,在加快运行速度的同时保证数据的稳定性。
[0036]
进一步,对分类回归进行优化,具体包括:
[0037]
将目标类型分为需判高目标a、无需判高目标b和不明确目标c,则其分类识别集合ф={{a},{b},{c},{c,a},{c,b}};
[0038]
对3-d目标框进行置信度校正,设定目标置信度阈值分别为δ1、δ2、δ3,通过预设的目标置信度阈值判断目标船舶是否需要进行高度判定,包括以下步骤:
[0039]
步骤1,如果校正后的目标置信度大于阈值δ1,则目标船舶被判定为无需判高目标,结束操作;否则进入步骤2;
[0040]
步骤2,如果校正后的目标置信度大于阈值δ2,则目标船舶被判定为需判高目标,进行步骤s4、s5操作;否则目标船舶类型不明确,进入步骤3;
[0041]
步骤3,如果校正后的目标置信度大于阈值δ3,则目标船舶被判定为{c,a}类,进行步骤s4、s5操作;否则目标船舶被判定为{c,b}类,结束操作。
[0042]
进一步,所述置信度校正为采用一种置信度后处理机制进行校正,具体包括:
[0043]
引入纠正项β来抑制低交并比(intersection-over-union,iou)预测的不确定性,增大低iou预测与高iou预测的区别,即:
[0044]
β=i
α
[0045]
式中,i表示预测的iou,α是一个超参数;用β对分类分数进行修正,则在分类回归中有置信度方程f如下:
[0046]
f=c*β=c*i
α
[0047]
式中,c表示预测边界框的分类得分,通过置信度方程f计算得到校正后的置信度。
[0048]
进一步,在步骤s4中,结合3-d目标框的参数计算激光雷达检测区域中目标船舶的航向和实际高度,具体包括:
[0049]
选定激光雷达建立激光雷达坐标系,将激光雷达中心设为原点o构建右手直角坐标系,x轴位于过原点的水准面内,y轴为过原点的铅垂线,z轴位于过原点的水平面内;
[0050]
选择目标船舶当前3-d目标框的中心坐标作为目标点,激光雷达原点与目标点间的距离记作r;
[0051]
所述激光雷达通过安装平台以固定的俯仰角分别安装在江两岸输电塔特定高度的跟踪架上;为减小精度误差进行角度修正,激光雷达与目标点间的水平角度记作ε1,垂直角度记作θ1;安装平台的水平角度记作ε2,垂直角度记作θ2;跟踪架当前时刻的水平角度记作ε3,垂直角度记作θ3;在激光雷达坐标系下,角度关系式如下:
[0052][0053]
式中,α表示修正后激光雷达与目标点间的水平角度,ω表示修正后激光雷达与目标点间的垂直角度;
[0054]
计算激光雷达坐标系下对应目标点的空间坐标(x
space
,y
space
,z
space
):
[0055][0056]
通过坐标系变换法将激光雷达坐标系下目标点的空间坐标转换为场景坐标系下的空间坐标;根据场景坐标系下目标点空间坐标和方向角数据的变化情况,拟合目标船舶的运动轨迹计算出航行方向;
[0057]
在场景坐标系下对驶向跨江输电线的目标船舶3-d目标框尺寸进行参数映射得到目标船舶的实际高度。
[0058]
本发明与现有技术相比,具有如下优点与有益效果:
[0059]
1、相比于基于图像处理技术的防船舶碰撞方法检测效果不可避免地受到拍摄效果、图像质量、外界环境等因素的影响,本发明通过激光雷达可以有效的降低外界环境、图像质量对检测效果的影响,提高了获取数据的精度,在夜间环境也可以正常运行。
[0060]
2、本发明通过采用双激光雷达的扫描模式,解决了大场景下点云数据稀疏的问题。
[0061]
3、本发明通过一种快速全局对齐机制和改进迭代最近点配准算法(即改进icp配准算法)相结合的方法能够快速准确地对目标船舶点云数据进行配准。
[0062]
4、本发明通过改进点云物体检测器和置信度后处理机制,提高了船舶实际高度测量的精度。
[0063]
5、本发明通过优化分类回归减少了计算负担,提高了检测测量的实时性。
附图说明
[0064]
图1是本发明实施例中跨江输电线防船舶碰撞方法流程图。
[0065]
图2是本发明实施例中激光雷达安装示意图。
[0066]
图3是本发明实施例中点云数据配准方法流程图。
[0067]
图4是本发明实施例中改进的点云物体检测器结构示意图。
[0068]
图5是本发明实施例中轻量化残差模块结构图。
[0069]
图6是本发明实施例中优化分类回归流程图。
[0070]
图7是本发明实施例中坐标系转换与航向高度计算流程图。
[0071]
图8是本发明实施例中雷达坐标系示意图。
[0072]
图9是本发明实施例中决策机制流程图。
具体实施方式
[0073]
下面结合实施例及附图对本发明作进一步详细的描述,但本发明的实施方式不限于此。
[0074]
如图1所示,本实施例提供了一种基于激光雷达的跨江输电线防船舶碰撞方法,包括以下步骤:
[0075]
s1:通过激光雷达获取检测区域内船舶的点云数据。
[0076]
本实施例中,在获取船舶的点云数据前需要对激光雷达进行安装,激光雷达通过安装平台以固定的俯仰角分别安装在江两岸输电塔适当高度的跟踪架上,保证扫描范围能够覆盖检测区域,检测区域为临近跨江输电线的限高区域;根据船舶的航行航道,一个激光雷达用于扫描获取船舶的主要点云数据,另一个激光雷达用于扫描进行点云数据补全,避免由于点云数据稀疏造成的船舶高度计算误差。如图2所示,激光雷达1和激光雷达2通过安装平台以固定的俯仰角分别安装在江两岸输电塔适当高度的跟踪架上,其扫描范围覆盖检测区域;当船舶在航道1航行时,激光雷达1用于扫描获取船舶的主要点云数据,激光雷达2用于进行点云数据补全;当船舶在航道2航行时,激光雷达2用于扫描获取船舶的主要点云数据,激光雷达1用于进行点云数据补全。
[0077]
s2:采用一种快速全局对齐机制和改进icp配准算法相结合的方法对步骤s1获取到的点云数据进行配准,首先,通过快速全局对齐机制求解目标函数得到最佳初始变换矩阵进行初始配准,其次采用点到平面距离公式将icp配准算法非线性问题近似转化为线性问题,迭代求解点云数据刚性变换矩阵进行精细配准。
[0078]
本实施例中,考虑到点云数据的稀疏性和受物体遮挡的原因,需要进行多次扫描得到多组点云数据集,故而采用一种快速全局对齐机制和改进icp配准算法相结合的方法对步骤s1获取到的点云数据进行配准,如图3所示,具体包括:
[0079]
首先,对点云数据进行初始配准,对于任意两组点云数据集x和y建立匹配点对集:
[0080]
k={(x,y)|x∈x,y∈y}
[0081]
式中,x表示点云数据集x中的点云数据,y表示点云数据集y中的点云数据;通过匹配点对集k构建刚性变换矩阵t,使得两组点云数据之间的欧氏距离最小化;
[0082]
为了生成匹配点对集k,使用fpfh计算点云数据集x的特征直方图f(x)={f(x):x∈x}和点云数据集y的特征直方图f(x)={f(y):y∈y},提取点云的区域特征;
[0083]
对于点云数据集x和y的特征直方图采用互相估计方法,当f(x)是f(x)中f(y)的最邻近,f(y)是f(y)中f(x)的最邻近时,将满足此关系的所有(x,y)添加到最邻近点集k1中,从最邻近点集k1中随机选择点云数据,例如选择三对点云数据(x1,y1),(x2,y2),(x3,y3),分
别构造成(x1,x2,x3),(y1,y2,y3),利用以下公式检查两者间的相似性:
[0084][0085]
式中,τ表示阈值,考虑到配准精度和配准速度一般设定为0.9;(xi,yi)、(xj,yj)表示满足最邻近关系的匹配点对,其中i≠j;当满足该条件时,将点云数据添加到匹配点对集k中;对于匹配点对集k,构造的目标函数e(t)如下:
[0086][0087]
通过稳健统计与线性过程相结合的方法搜索较大距离的对应点作为失效的错误点,根据建立的匹配点对集k计算线性过程权重l={l
x,y
},式中,l
x,y
为计算得到的权重值,构造的目标函数e(t,l)如下:
[0088][0089]
式中,μ为超参数控制目标函数中残差的权重,根据实际情况进行设定;当e(t,l)对l
x,y
求导等于0时,目标函数e(t,l)取得最小值,求得:
[0090][0091]
从而获得最佳初始变换状态完成初始配准;
[0092]
再采用改进icp配准算法进行精细配准获得高精度配准效果,包括以下改进:
[0093]
将非线性问题通过点到平面的距离函数近似转化为线性问题,获得更快的收敛速度;
[0094]
为消除初始配准过程中存在的错误对应点,首先匹配点对通过k-means算法指定最大的聚类,以消除部分错误的对应点,再使用拆分方法,当发现错误的对应点,采用欧几里德距离和标准相结合的判断方法,精细地消除配对偏离;
[0095]
在k-d树邻近搜索方法的基础上,加入了超时响应机制,当邻近范围内所有点云数据都被遍历,或者搜索超过设置的时间阈值时,当前最佳结果被用作最近点。
[0096]
考虑到激光雷达扫描船舶的点云数据受外界因素的影响,不可能通过一次扫描或单一激光雷达完成对整体船舶的三维点云数据的处理,因此采用该方法一方面可以把三维点云数据拼接在一起实现点云配准,另一方面也可以实现对船舶高度的真实复原,使得后续生成3-d目标框能够真实反映船舶高度。
[0097]
s3:通过改进点云物体检测器对配准后的点云数据进行目标检测生成3-d目标框,并得到3-d目标框的参数,包括中心坐标、3-d目标框尺寸和方向角数据。其中,所述改进点云物体检测器是在cia-ssd的基础上,通过叠加设计的轻量化残差模块构建空间语义特征聚合模块ssfa module中的空间卷积组和语义卷积组,并且对分类回归进行优化。
[0098]
本实施例中,如图4所示,为改进点云物体检测器结构示意图,在cia-ssd的基础上,通过叠加设计的轻量化残差模块构建ssfa module中的空间卷积组和语义卷积组,减少内存占用从而实现轻量化;为方便后续的高度判定,对分类回归进行优化,提高检测结果的可靠性。其中,所述ssfa module具体情况如下:
[0099]
如图5所示,轻量化残差模块将残差模块中标准的卷积(conv)替换为逐通道卷积(dwconv)和逐点卷积(pwconv),通过堆叠多个轻量化残差模块构建空间卷积组和语义卷积组,在得到更高精确度的前提下,能够有效减少模型参数实现轻量化;
[0100]
通过空间卷积组保持与稀疏卷积组输出的bev特征图一样大小的输出和维度,避免空间信息的丢失;
[0101]
将空间卷积组的输出特征作为输入,通过语义卷积组增加通道数,减小特征大小,获得更高层次的抽象语义信息;
[0102]
通过反卷积层(deconv)恢复语义卷积组输出特征的维度使其与空间卷积组的输出特征维度相同,并生成上采样语义特征;
[0103]
将两个卷积组产生的特征输入到注意力融合机制中进行自适应特征融合,得到具有丰富空间信息和语义信息的特征,使得生成的3-d目标框和目标分类的置信度更加精准;
[0104]
使用logsoftmax函数代替softmax函数计算类别概率分布,在加快运行速度的同时保证数据的稳定性。
[0105]
其中,对分类回归进行优化,如图6所示,具体包括:
[0106]
将目标类型分为需判高目标a、无需判高目标b和不明确目标c,则其分类识别集合ф={{a},{b},{c},{c,a},{c,b}};
[0107]
对3-d目标框进行置信度校正,设定目标置信度阈值分别为δ1、δ2、δ3,通过预设的目标置信度阈值判断目标船舶是否需要进行高度判定,包括以下步骤:
[0108]
步骤1,如果校正后的目标置信度大于阈值δ1,则目标船舶被判定为无需判高目标,结束操作;否则进入步骤2;
[0109]
步骤2,如果校正后的目标置信度大于阈值δ2,则目标船舶被判定为需判高目标,进行步骤s4、s5操作;否则目标船舶类型不明确,进入步骤3;
[0110]
步骤3,如果校正后的目标置信度大于阈值δ3,则目标船舶被判定为{c,a}类,进行步骤s4、s5操作;否则目标船舶被判定为{c,b}类,结束操作。
[0111]
其中,所述置信度校正为采用一种置信度后处理机制进行校正,具体包括:
[0112]
引入纠正项β来抑制低iou预测的不确定性,增大低iou预测与高iou预测的区别,即:
[0113]
β=i
α
[0114]
式中,i表示预测的iou,α是一个超参数。用β对分类分数进行修正,则在分类回归中有置信度方程f如下:
[0115]
f=c*β=c*i
α
[0116]
式中,c表示预测边界框的分类得分,通过置信度方程f计算得到校正后的置信度。
[0117]
s4:根据步骤s3生成的3-d目标框的参数计算检测区域中目标船舶的航向和实际高度。
[0118]
本实施例中,所述结合3-d目标框的参数计算激光雷达检测区域中目标船舶的航向和实际高度,如图7所示,具体包括:
[0119]
选定激光雷达建立激光雷达坐标系,如图8所示,将激光雷达中心设为原点o构建右手直角坐标系,x轴位于过原点的水准面内,y轴为过原点的铅垂线,z轴位于过原点的水平面内;
[0120]
选择目标船舶当前3-d目标框的中心坐标作为目标点,激光雷达原点与目标点间的距离记作r;
[0121]
为减小精度误差进行角度修正,激光雷达与目标点间的水平角度记作ε1,垂直角度记作θ1;安装平台的水平角度记作ε2,垂直角度记作θ2;跟踪架当前时刻的水平角度记作ε3,垂直角度记作θ3;在激光雷达坐标系下,角度关系式如下:
[0122][0123]
式中,α表示修正后激光雷达与目标点间的水平角度,ω表示修正后激光雷达与目标点间的垂直角度;
[0124]
计算激光雷达坐标系下对应目标点的空间坐标(x
space
,y
space
,z
space
):
[0125][0126]
通过坐标系变换法将激光雷达坐标系下目标点的空间坐标转换为场景坐标系下的空间坐标;根据场景坐标系下目标点空间坐标和方向角数据的变化情况,拟合目标船舶的运动轨迹计算出航行方向;
[0127]
在场景坐标系下对驶向跨江输电线的目标船舶3-d目标框尺寸进行参数映射得到目标船舶的实际高度。
[0128]
s5:根据跨江输电线高度设定高度阈值γ,对于检测区域中驶向跨江输电线的船舶,当船舶高度大于γ发出碰撞预警指令,当船舶高度小于γ结束操作。
[0129]
本实施例中,如图9所示,通过s4获得目标船舶的航向和实际高度,已知跨江输电线的高度并根据其高度设定高度阈值γ,阈值γ根据实际情况进行选取,对于检测区域中驶向跨江输电线的船舶,判断目标船舶实际高度是否大于高度阈值γ,当船舶高度大于γ时,发出碰撞预警指令;当船舶高度小于γ时,结束操作。
[0130]
综上所述,本发明方法利用激光雷达能够准确快速的对目标船舶进行判高,防止超高船舶与跨江输电线发生碰撞,在夜间环境下也可以正常运行,另外,本发明方法也可以用于跨江大桥防船舶碰撞的监控,具有实际应用价值,值得推广。
[0131]
上述实施例为本发明较佳的实施方式,但本发明的实施方式并不受上述实施例的限制,其他的任何未背离本发明的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1