一种时间自由的空间飞行器最优单脉冲拦截方法
1.本发明涉及一种时间自由的空间飞行器最优单脉冲拦截方法,尤其涉及适用于在时间自由情况下近地圆轨道的空间飞行器最优单脉冲拦截方法,属于航空航天技术领域。
背景技术:
2.随着各国航天技术的发展,对未知空间的探索以及保持空间技术优势已经成为各大国的战略目标。空间攻防正成为涉及空间领域的一个研究热点。在空间攻防领域中,一个重要的问题就是空间飞行器拦截问题。空间飞行器拦截问题是一个典型的空间机动问题,拦截器在与外大气层目标交战时,应机动接近目标,使其在拦截时刻的位置矢量相等。按照机动模式,可将拦截问题划分成为脉冲拦截和有限推力拦截这两类问题。对于有限推力拦截问题,为了简化分析,当连续推力的持续时间远小于推力之间的间隔时间或航天器的不机动的时间时,可以用脉冲推力近似表示连续推力。因此,研究脉冲拦截问题是十分必要的。此外,按照施加脉冲的个数,又可将脉冲拦截分为单脉冲以及多脉冲拦截。多脉冲拦截虽然考虑的能量通常会小于单脉冲拦截,但是考虑到空间飞行器的高效的作战需求,相比于多脉冲拦截,单脉冲拦截可减小作战所需的后续轨道保障成本并提升可靠性。此外,相比于固定拦截时刻,考虑自由拦截时刻的最优单脉冲问题会减少脉冲大小,进而降低燃料消耗,使空间飞行器能够携带更多的有效载荷,对目标实施更高效的毁伤。然而,拦截时刻变成未知的,这增加了一个求解自由度,可能会降低求解效率。因此,本专利提出的时间自由的空间飞行器最优单脉冲拦截方法不仅可以完成时间自由的最优单脉冲拦截问题的求解,并且通过化简可以得到一个半解析解,显著提升了计算效率,进而可满足更多空间飞行器拦截任务场景。
3.在已发展的关于空间飞行器单脉冲最优脉冲拦截方法中在先技术[1](参见:孟少飞,刘新学,傅丹,等.单脉冲最省能量拦截轨道迭代算法[j].系统工程与电子技术,2016,38(12):2821-2826.)考虑在轨拦截中拦截起点固定而拦截终点不固定条件下的单脉冲单圈最省能量拦截问题,从转移速度增量的变化规律角度入手设计了能量最省拦截轨道的数值迭代算法,既提高了算法的快速性与可靠性,又避免了陷入局部最优的问题,但是多层迭代会增加计算复杂度与求解时间。
[0004]
时间自由的空间飞行器单脉冲拦截问题本质上是一个非线性非凸问题,因此不存在解析解。若能推导最优单脉冲拦截问题的一阶必要条件,并进行适当简化得到上述问题的半解析解,则能够提升数值迭代的求解速度,进而使该问题的应用场景有明显的扩展。
技术实现要素:
[0005]
本发明公开的一种时间自由的空间飞行器最优单脉冲拦截方法要解决的技术问题是,在拦截时刻自由的条件下,通过求解拦截器的最优脉冲实现对在轨运行目标的拦截;具有如下优点:(1)鲁棒性强、可靠性高;(2)机动脉冲最优;(3)对拦截器的轨道高度没有严格限制和约束;(4)半解析解,求解高效。
[0006]
本发明的目的是通过下述技术方案实现的:
[0007]
本发明公开的一种时间自由的空间飞行器最优单脉冲拦截方法是一种半解析法。首先建立以地球中心为原点的地心赤道惯性坐标系,并且在该坐标系的基础上建立拦截器与目标的动力学方程与拦截条件约束;然后,推导出最优单脉冲拦截的一阶必要条件,并建立最优拦截方程组;使用高阶泰勒展开方法对最优拦截方程组进行简化,得到解析的非线性方程组。最后,使用牛顿迭代法求解该非线性方程组即得到最优脉冲,即在拦截时刻自由的条件下,通过求解拦截器的最优脉冲实现对在轨运行目标的拦截。
[0008]
本发明公开的一种时间自由的空间飞行器最优单脉冲拦截方法,建立拦截器与目标的动力学方程,推导出最优单次脉冲拦截问题一阶必要条件,建立最优拦截方程组,并利用高阶泰勒展开的方法,能够得到解析的非线性方程组。使用牛顿迭代法求解该方程组,求解效率高,优势明显。
[0009]
本发明公开的一种时间自由的空间飞行器最优单脉冲拦截方法,包括如下步骤:
[0010]
步骤一:建立地心赤道惯性坐标系。
[0011]
选择地球的中心作为坐标原点o来建立地心赤道惯性坐标系,xy平面与地球赤道平面重合。x轴指向春分点,z轴沿地球旋转轴(即垂直于赤道平面),指向北极。y轴与x和z两轴构成右手直角坐标系,即完成地心赤道惯性坐标系的建立。
[0012]
步骤二:在地心赤道惯性坐标系下建立拦截器与目标的动力学方程以及拦截条件约束。
[0013]
步骤2.1:在地心赤道惯性坐标系下建立拦截器与目标的动力学方程;
[0014]
拦截器与目标在地心赤道惯性坐标系下的动力学方程表示为:
[0015][0016]
其中μ表示地球的引力常数,下标p代表拦截器,下标e代表目标,而t表示飞行时间。r
p
(t)=[x
p
(t)y
p
(t)z
p
(t)]
t
和v
p
(t)=[v
x,p
(t)v
y,p
(t)v
z,p
(t)]
t
分别表示拦截器在地心赤道惯性坐标系oxyz下的位置坐标和速度坐标,r
p
(t)=||r
p
(t)||为拦截器位置向量的模长。同理,re(t)=[xe(t)ye(t)ze(t)]
t
和ve(t)=[v
x,e
(t)v
y,e
(t)v
z,e
(t)]
t
分别表示目标在地心赤道惯性坐标系oxyz下的位置坐标和速度坐标,re(t)=||re(t)||为目标位置向量的模长。t0表示初始时刻,通常可以认为t0=0,r
p0
和v
p0
表示拦截器在初始时刻的位置和速度,而r
e0
和v
e0
代表目标在初始时刻的位置和速度。δv
p
表示拦截器的初始速度增量,是未知的待求量。
[0017]
步骤2.2:建立拦截条件约束。
[0018]
考虑在末端时刻拦截器与目标满足拦截条件,即在拦截时刻tf拦截器与目标的位置矢量相同
[0019]rp
(tf)=re(tf)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0020]
拦截时刻tf是需要优化求解的变量。
[0021]
步骤三:推导最优单次脉冲拦截的一阶必要条件并建立最优拦截方程组。
[0022]
步骤3.1:推导最优单次脉冲拦截的一阶必要条件;
[0023]
利用式(1)中的动力学进行递推得到:
[0024][0025]
其中表示拦截器的终端位置是拦截时刻tf与速度增量δv
p
的函数,表示目标的终端位置仅是拦截时刻tf的函数,二者均无解析表达式,注意为实数集。再利用式(2)约束中的拦截条件,得:
[0026][0027]
式(4)表明速度增量δv
p
与拦截时刻tf满足等式约束关系。实际上,当给定拦截时刻tf,该拦截问题是一个兰伯特问题,可使用兰伯特问题直接求解,即存在一个速度增量δv
p
与拦截时刻tf对应;令v
p1
=δv
p
+v
p0
,则最优速度增量所满足的条件为:
[0028][0029]
对继续进行推导,首先对式(4)两端取变分,得:
[0030][0031]
进一步地,得:
[0032][0033]
式(7)两端同时点乘δv
p
,可得最优速度增量的必要条件为:
[0034][0035]
步骤3.2:建立最优拦截方程组;
[0036]
联立式(4)与式(8),得最优脉冲拦截方程组如下:
[0037][0038]
其中,未知量为方程组的个数为4,方程组是封闭的。求解上述最优拦截方程组即可得到最优速度增量。
[0039]
步骤四:简化最优脉冲拦截方程组得到解析的非线性方程组。
[0040]
在初始时刻t0=0,对拦截器的位置矢量r
p
(t)进行泰勒展开,得:
[0041][0042]
取式(10)中级数和的前五项:
[0043][0044]
将式(11)用矩阵形式表示:
[0045]rp
(t)=φ
p
τ
p
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(12)
[0046]
其中,φ
p
和τ
p
是为了方便表达而引入的中间变量,具体表达式如下:
[0047][0048]
τ
p
=[1 t t
2 t
3 t4]
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(14)
[0049][0050]
在拦截时刻tf时,由式(12)得:
[0051]rp
(tf)=φ
p
τ
pf
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(16)
[0052]
其中,τ
pf
的表达式如下:
[0053]
τ
pf
=[1 t
f t
f2 t
f3 t
f4
]
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(17)
[0054]
根据式(8),推导出两个偏导计算公式:
[0055][0056][0057]
其中,λ
p
,π
p
,λ
pi
,i=1,2,..,5是为了简化表达而引入的中间变量,其表达式如
下:
[0058][0059][0060][0061][0062][0063][0064][0065][0066]
相似地,按照式(10)-(23)推导目标的终端位置的解析近似表达式,在初始时刻t0=0,对目标的位置矢量re(t)进行泰勒展开,得:
[0067][0068]
取式(24)所示级数和的前五项:
[0069][0070]
将式(25)用矩阵形式表示:
[0071]
re(t)=φeτeꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(26)
[0072]
其中,φe和τe是为了方便表达而引入的中间变量,具体表达式如下:
[0073][0074]
τe=[1 t t
2 t
3 t4]
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(28)
[0075][0076]
在拦截时刻tf时,由式(26)得:
[0077]
re(tf)=φeτ
ef
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(30)
[0078]
其中,τ
ef
的表达式如下:
[0079]
τ
ef
=[1 t
f t
f2 t
f3 t
f4
]
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(31)
[0080]
相似地,推导出终端位置对拦截时刻的偏导数计算公式:
[0081][0082]
其中,λe是为了简化表达而引入的中间变量,其表达式如下:
[0083][0084]
利用式(18)(19)和(32),式(8)中的必要条件表示为:
[0085][0086]
其中
[0087]
[0088]
综上所述,化简后的最优脉冲非线性方程组如下:
[0089][0090]
进一步,将(36)写成一般的非线性方程组形式:
[0091]
f(x)=0
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(37)
[0092]
其中上述方程组的形式完全是解析的。
[0093]
步骤五:通过牛顿迭代法求解得到最优脉冲,即在拦截时刻自由的条件下,通过求解拦截器的最优脉冲实现对在轨运行目标的拦截。
[0094]
给定初值x
(0)
,迭代更新式(38)直至满足式(39)所示的收敛条件
[0095]
x
(k+1)
=x
(k)-f
′
(x
(k)
)-1
f(x
(k)
),k=0,1,...
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(38)
[0096]
||x
(k+1)-x
(k)
||≤δ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(39)
[0097]
其中f
′
(x
(k)
)-1
是向量函数f(x)的雅可比矩阵,而δ为用户设置的阈值。最终可得到最优脉冲δv
p
以及与之对应的拦截时刻tf,即在拦截时刻自由的条件下,通过求解拦截器的最优脉冲实现对在轨运行目标的拦截。
[0098]
有益效果:
[0099]
1、本发明公开的一种时间自由的空间飞行器最优单脉冲拦截方法,在拦截时刻自由的条件下,利用单次脉冲机动实现拦截器对目标的成功拦截,且对自身轨道高度没有严苛的要求,优势明显。
[0100]
2、本发明公开的一种时间自由的空间飞行器最优单脉冲拦截方法,能够求解时间自由的航天器单脉冲拦截问题,相比于时间固定的拦截问题,灵活性更高,应用场景更丰富,适用范围更广。
[0101]
3、本发明公开的一种时间自由的空间飞行器最优单脉冲拦截方法,通过推导最优单脉冲拦截问题的必要条件,因而获得解满足最优性条件。在高精度近似下,能够得到原问题的近似最优解,相比于传统给定拦截时刻的方式,更加节约燃料。
[0102]
4、本发明公开的一种时间自由的空间飞行器最优单脉冲拦截方法,通过牛顿迭代法对最优脉冲非线性方程组进行求解,本质上是一个半解析解,求解效率高。
[0103]
5、本发明公开的一种时间自由的空间飞行器最优单脉冲拦截方法,由于采用在初始时刻施加脉冲且最优脉冲拦截方程组具有普适性,因此,鲁棒性强、可靠性高。
附图说明
[0104]
图1是本发明步骤3中脉冲增量δv
p
与拦截时刻tf关系的示意图;
[0105]
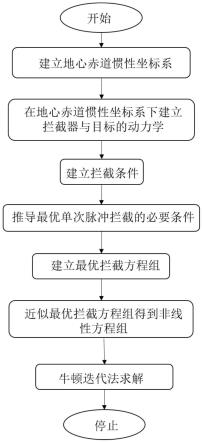
图2是本发明的一种时间自由的空间飞行器最优单脉冲拦截方法的流程图;
[0106]
图3是本实施例中拦截器与目标的飞行轨迹;
[0107]
图4是本实施例中拦截器与目标的位置矢量随时间变化曲线。
具体实施方式
[0108]
为了更好地说明本发明的目的和优点,下面通过对一种时间自由的空间飞行器最
优单脉冲拦截方法进行仿真分析,对本发明做出详细解释。
[0109]
实施例1:
[0110]
如图2所示,本实施例公开的一种时间自由的航天器最优单脉冲拦截方法,包括如下步骤:
[0111]
步骤一:建立地心赤道惯性坐标系。
[0112]
选择地球的中心作为坐标原点o来建立地心赤道惯性坐标系,xy平面与地球赤道平面重合。x轴指向春分点,z轴沿地球旋转轴(即垂直于赤道平面),指向北极。y轴与x和z两轴构成右手直角坐标系,即完成地心赤道惯性坐标系的建立。
[0113]
步骤二:在地心赤道惯性坐标系下建立拦截器与目标的动力学方程以及拦截条件约束。
[0114]
步骤2.1:在地心赤道惯性坐标系下建立拦截器与目标的动力学方程;
[0115]
拦截器与目标在地心赤道惯性坐标系下的动力学方程表示为:
[0116][0117]
其中μ表示地球的引力常数,下标p代表拦截器,下标e代表目标,而t表示飞行时间。r
p
(t)=[x
p
(t)y
p
(t)z
p
(t)]
t
和v
p
(t)=[v
x,p
(t)v
y,p
(t)v
z,p
(t)]
t
分别表示拦截器在地心赤道惯性坐标系oxyz下的位置坐标和速度坐标,r
p
(t)=||r
p
(t)||为拦截器位置向量的模长。同理,re(t)=[xe(t)ye(t)ze(t)]
t
和ve(t)=[v
x,e
(t)v
y,e
(t)v
z,e
(t)]
t
分别表示目标在地心赤道惯性坐标系oxyz下的位置坐标和速度坐标,re(t)=||re(t)||为目标位置向量的模长。t0表示初始时刻,通常可以认为t0=0,r
p0
和v
p0
表示拦截器在初始时刻的位置和速度,而r
e0
和v
e0
代表目标在初始时刻的位置和速度。δv
p
表示拦截器的初始速度增量,是未知的待求量。
[0118]
步骤2.2:建立拦截条件约束。
[0119]
考虑在末端时刻拦截器与目标满足拦截条件,即在拦截时刻tf拦截器与目标的位置矢量相同
[0120]rp
(tf)=re(tf)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(41)
[0121]
拦截时刻tf是需要优化求解的变量。
[0122]
步骤三:推导最优单次脉冲拦截的一阶必要条件并建立最优拦截方程组。
[0123]
步骤3.1:推导最优单次脉冲拦截的一阶必要条件;
[0124]
利用式(1)中的动力学进行递推可得到:
[0125][0126]
其中表明拦截器的终端位置是拦截时刻tf与速度增量δv
p
的函数,表示目标的终端位置仅是拦截时刻tf的函数,二者均无解析表达式,注意为实数集。再利
用式(41)约束中的拦截条件,可得:
[0127][0128]
式(43)表明速度增量δv
p
与拦截时刻tf满足等式约束关系。实际上,当给定拦截时刻tf,该拦截问题是一个兰伯特问题,可使用兰伯特问题直接求解,即存在一个速度增量δv
p
与拦截时刻tf对应,如图1所示;令v
p1
=δv
p
+v
p0
,则最优速度增量所满足的条件为:
[0129][0130]
对继续进行推导,首先对式(43)两端取变分,可得:
[0131][0132]
进一步地,得:
[0133][0134]
式(46)两端同时点乘δv
p
,可得最优速度增量的必要条件为:
[0135][0136]
步骤3.2:建立最优拦截方程组;
[0137]
联立式(43)与式(47),可得最优脉冲拦截方程组如下:
[0138][0139]
其中,未知量为方程组的个数为4,方程组是封闭的。求解上述最优拦截方程组即可得到最优速度增量。
[0140]
步骤四:简化最优脉冲拦截方程组得到解析的非线性方程组
[0141]
在初始时刻t0=0,对拦截器的位置矢量r
p
(t)进行泰勒展开,可得:
[0142][0143]
取式(49)中级数和的前五项:
[0144]
[0145]
将式(50)用矩阵形式表示:
[0146]rp
(t)=φ
p
τ
p
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(51)
[0147]
其中,φ
p
和τ
p
是为了方便表达而引入的中间变量,具体表达式如下:
[0148][0149]
τ
p
=[1 t t
2 t
3 t4]
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(53)
[0150][0151]
在拦截时刻tf时,由式公式参考此处(51)可得:
[0152]rp
(tf)=φ
p
τ
pf
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(55)
[0153]
其中,τ
pf
的表达式如下:
[0154]
τ
pf
=[1 t
f t
f2 t
f3 t
f4
]
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(56)
[0155]
根据式(47),推导出两个偏导计算公式:
[0156][0157][0158]
其中,λ
p
,π
p
,λ
pi
,i=1,2,..,5是为了简化表达而引入的中间变量,其表达式如下:
[0159][0160]
[0161][0162][0163][0164][0165][0166][0167]
相似地,按照式(49)-(62)推导目标的终端位置的解析近似表达式,在初始时刻t0=0,对目标的位置矢量re(t)进行泰勒展开,可得:
[0168][0169]
取式(63)所示级数和的前五项:
[0170][0171]
将式(64)用矩阵形式表示:
[0172]
re(t)=φeτeꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(65)
[0173]
其中,φe和τe是为了方便表达而引入的中间变量,具体表达式如下:
[0174][0175]
τe=[1 t t
2 t
3 t4]
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(67)
[0176][0177]
在拦截时刻tf时,由式(65)可得:
[0178]
re(tf)=φeτ
ef
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(69)
[0179]
其中,τ
ef
的表达式如下:
[0180]
τ
ef
=[1 t
f t
f2 t
f3 t
f4
]
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(70)
[0181]
相似地,推导出终端位置对拦截时刻的偏导数计算公式:
[0182][0183]
其中,λe是为了简化表达而引入的中间变量,其表达式如下:
[0184][0185]
利用式(57),(58)和(71),式(47)中的必要条件可表示为:
[0186][0187]
其中
[0188][0189]
综上所述,化简后的最优脉冲非线性方程组如下:
[0190][0191]
进一步,将(75)写成一般的非线性方程组形式:
[0192]
f(x)=0
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(76)
[0193]
其中上述方程组的形式完全是解析的。
[0194]
步骤五:牛顿迭代法求解得到最优脉冲。
[0195]
给定初值x
(0)
,迭代更新式(77)直至满足式(78)所示的收敛条件
[0196]
x
(k+1)
=x
(k)-f
′
(x
(k)
)-1
f(x
(k)
),k=0,1,...
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(77)
[0197]
||x
(k+1)-x
(k)
||≤δ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(78)
[0198]
其中f
′
(x
(k)
)-1
是向量函数f(x)的雅可比矩阵,而δ为用户设置的阈值。最终可得到最优脉冲δv
p
以及与之对应的拦截时刻tf。
[0199]
为了验证方法的可行性,选择拦截器与目标的初始位置和速度如表1所示。假设地球的半径为6378km。
[0200]
表1拦截器与目标航天器的初始状态
[0201] 初始位置矢量r0(m)初始速度矢量v0(m/s)拦截器[-4752.6-4602.11467.1]
t
×
103[3.947-5.72-2.86]
t
×
103目标[-3268.1-6038.2-327.1]
t
×
103[-3.011.165.50]
t
×
103[0202]
通过使用牛顿迭代法求解式(76)中的非线性方程组即可得到最优的脉冲增量以及对应的拦截时刻,从而实现拦截器对目标的拦截。为了验证本方法在单次脉冲拦截时脉冲的最优性以及计算效率等方面的优势,下面就本方法与时间固定的兰伯特方法进行仿真对比分析。
[0203]
使用表1中拦截器与目标的初始状态信息,以直接求解兰伯特问题作为对比方法,给定飞行时间为200s,可得脉冲增量为601.2319m/s,而使用本方法求解的最优脉冲为122.31m/s,仅为对比方法的20%,同时本方法的拦截时刻为208.83s,具体结果对比可见表2。该算例体现了本方法所得脉冲的最优性,并且本方法的求解时间仅为7毫秒,这体现了本方法的计算效率,有潜力应用在实时应用场景。
[0204]
表2两种方法的脉冲增量与拦截时刻
[0205] 拦截时刻tf(s)脉冲增量δv
p
(m/s)本方法208.83122.31对比方法200601.23
[0206]
进一步,以求得的最优脉冲进行轨道递推,可得到拦截器与目标的飞行轨迹。图3展示了拦截器与目标的飞行轨迹,最终拦截器以最低脉冲的代价实现了对目标的拦截。图4展示了拦截器与目标的位置矢量随时间的变化曲线,在末端时刻,二者的位置矢量重合,进一步验证了拦截器对目标的成功拦截。
[0207]
以上所述的具体描述,对发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施例,用于解释本发明,并不用于限定本发明的保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1