一种压电层合梁的维稳增效参数优化方法及系统
1.本发明涉及功能梯度压电材料技术领域,具体涉及一种压电层合梁的维稳增效参数优化方法及系统。
背景技术:
2.随着学术界对压电材料的研究不断增加、压电材料制备方法的进一步完善,尤其是航空航天事业发展的需要,压电层合梁结构在监控监测、形状控制等领域的研究和应用愈发博人眼球。
3.精确计算力-电耦合作用下压电层合结构响应和感应电压,确定压电片最优分布位置是实现压电层合结构静变形控制、精确定位和损伤修复的关键,然而由于力-电耦合效应的存在,压电复合层合结构响应的可靠预测成为一个具有挑战性的问题。
4.目前在湿热工况下功能梯度压电层合梁的维稳增效控制方法及参数优化还存在以下几个问题:一是现有算法虽然得到了压电层合梁弯曲和四边压电层合梁的精确解,但其所用公式繁琐,并且随着压电层层数增加难度愈大,使得分析压电层合梁的弯曲和稳定性时精度相对较低;二是用于控制振动力度的基于输出反馈的控制算法,虽然能够避免数字控制的必要性,减少了控制系统的时滞,然而,负反馈控制需要对传感器电压进行微分,对于有噪声的测量而言,会导致负反馈控制精度受到影响,从而导致系统的稳定性降低。
技术实现要素:
5.本发明的目的在于提供一种压电层合梁的维稳增效参数优化方法及系统,以解决现有技术中现有算法模型解算的压电层合梁的弯曲和稳定性精度相对较低以及负反馈控制需要对传感器电压进行微分,对于有噪声的测量会导致负反馈控制精度受到影响,从而导致系统的稳定性降低的技术问题。
6.为解决上述技术问题,本发明具体提供下述技术方案:
7.一种压电层合梁的维稳增效参数优化方法,包括以下步骤:
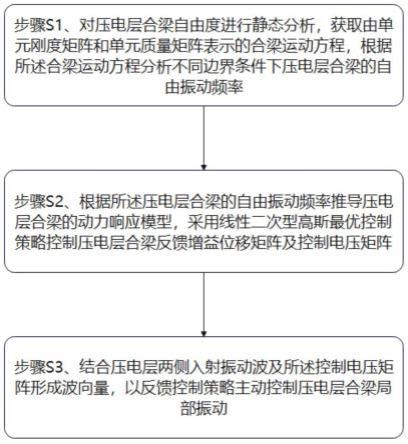
8.步骤s1、对压电层合梁自由度进行静态分析,获取由单元刚度矩阵和单元质量矩阵表示的合梁运动方程,根据所述合梁运动方程分析不同边界条件下压电层合梁的自由振动频率;
9.步骤s2、根据所述压电层合梁的自由振动频率推导压电层合梁的动力响应模型,采用线性二次型高斯最优控制策略控制压电层合梁反馈增益位移矩阵及控制电压矩阵;
10.步骤s3、结合压电层两侧入射振动波及所述控制电压矩阵形成波向量,以反馈控制策略主动控制压电层合梁局部振动。
11.作为本发明的一种优选方案,所述步骤s1中,将压电层合梁以自由振动模式建立空间直角坐标系,采用hamilton算法得到基于单元刚度矩阵和单元质量矩阵的合梁运动方程,将所述压电层合梁的振动波长设置为四个单元,计算所述压电层合梁的自由振动频率,其表示式为:
[0012][0013]
其中,e表示压电层合梁的弹性模量,m表示压电层合梁的单位长度质量,i表示压电层合梁的截面转动惯量,l表示压电层合梁的长度。
[0014]
作为本发明的一种优选方案,基于所述自由振动频率的不同边界条件将合梁上下压电层极化,测量压电层的模态频率,所述不同边界条件主要由压电层位置及压电层厚度进行调整。
[0015]
作为本发明的一种优选方案,所述步骤s2中,通过直接积分法对压电层合梁的频率方程直接进行逐步数值积分建立所述动力响应模型,对所述动力响应模型的目标函数采用线性二次型高斯最优控制策略获取目标函数最小值,所述线性二次型高斯最优控制策略具体步骤如下:
[0016]
步骤s201、将所述动力响应模型的目标函数作为状态变量和压电层输入矢量的加权平方,作为压电层合梁的控制状态调节器j,所述控制状态调节器j的表达式为:
[0017][0018]
其中,q
x
表示状态权系数矩阵,x(t)表示动力响应模型在t时刻的输入值矩阵,x
t
(t)表示动力响应模型在t时刻的输入值矩阵的转置,r表示控制权系数矩阵,μ
φ
(t)表示目标函数在t时刻的最小值矩阵,表示目标函数在t时刻的最小值矩阵的转置;
[0019]
步骤s202、设置所述动力响应模型初值x(0)作为最优致动输入,依据所述控制状态调节器j获取所有控制状态信息,采用线性二次型高斯最优控制构建状态观测器,实时监测系统的控制状态向量和控制输出,将控制输出作为位移矩阵;
[0020]
步骤s203、根据监测数据实时计算控制状态的估计值与实际值的最小方差,获取最优状态估计值作为控制电压矩阵。
[0021]
作为本发明的一种优选方案,所述步骤s202中,将所述位移矩阵作为二次型性能指标函数的优化目标函数,通过控制加权矩阵获取最优的状态反馈控制,通过遗传算法优化所述控制加权矩阵,其构造步骤为:
[0022]
步骤s2021、采用二进制编码形式将控制加权矩阵的分量表示为二进制串,定义优化参数区间,获取字符串长度;
[0023]
步骤s2022、依据所述动力响应模型的输出信息作为初始种群,通过目标函数求解控制状态调节器j的最小值,并将适应度函数选择为目标函数的倒数;
[0024]
步骤s2023、选取小于适应度值的种群粒子作为最优适应度个体,获取最优控制制动电压矩阵。
[0025]
作为本发明的一种优选方案,所述步骤s3中,将压电片两侧的入射波用作反馈状态变量获取反馈电压矩阵,采用负反馈系数对反馈电压矩阵做映射处理获取整个压电片的正反向等效透射和反射矩阵,并计算压电层合梁非连续特征处的振动波。
[0026]
作为本发明的一种优选方案,所述负反馈系数根据外部给压电层施加化的电压幅
值以及相位值来设定。
[0027]
作为本发明的一种优选方案,将所述振动波以电荷量的形式在压电层及控制器之间建立电压联系,所述压电层及控制器之间的电压表示式为:
[0028]uio
=k
io
e-t(β+ωτ)usio
[0029]
其中,k
io
表示反馈增益,β表示相位,ω表示角频率,τ表示时间滞后值,u
sio
表示反馈电压矩阵变量,t表示时刻。
[0030]
作为本发明的一种优选方案,所述反馈增益k
io
表示所述振动波在0.1m范围内振幅响应的模之和。
[0031]
一种根据权利要求1-9任一项所述的压电层合梁的维稳增效参数优化方法的系统,包括:压电作动器、数据分析模块、反馈控制模块、控制评估模块以及稳态仿真模块;
[0032]
所述压电作动器,用于采集所述压电层合梁表面压电陶瓷片的振动信号及电压信号;
[0033]
所述数据分析模块,用于分析振动信号及电压信号的振动效应以反馈控制局部振动;
[0034]
所述反馈控制模块,用于分析压电层存在激励源时压电层局部的振动效应,通过将部分传递至合梁上局部区域的振动能量反射回激励处,以抵消部分的振动能量实现局部振动控制;
[0035]
所述控制评估模块,用于评价所述最优控制制动电压矩阵获取目标函数最小值;
[0036]
所述稳态仿真模块,用于仿真分析稳态参数控制结果。
[0037]
本发明与现有技术相比较具有如下有益效果:
[0038]
本发明通过对复合材料压电层合梁进行数值分析获得高精度压电层合梁单元,构建合梁运动方程计算不同边界条件下压电层合梁的自由振动频率,有效提高了压电层合梁单元在动力学分析中的准确性与高效性,且建立动力响应模型算法相对简单,采用线性二次型高斯最优控制策略实现了压电层合梁的振动主动控制,根据动力响应模型的目标函数采用基于遗传算法对线性二次型高斯控制中的加权矩阵进行优化,使其控制效果能够满足压电层合结构振动主动控制要求,减少了控制系统的时滞,确保了作动器与传感器之间的完美配置,提高了系统的稳定性。
附图说明
[0039]
为了更清楚地说明本发明的实施方式或现有技术中的技术方案,下面将对实施方式或现有技术描述中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是示例性的,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图引伸获得其它的实施附图。
[0040]
图1为本发明实施例提供的压电层合梁的维稳增效参数优化方法流程图;
[0041]
图2为本发明实施例提供的系统结构框图。
[0042]
图中的标号分别表示如下:
[0043]
1-压电作动器;2-数据分析模块;3-反馈控制模块;4-控制评估模块;5-稳态仿真模块。
具体实施方式
[0044]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0045]
如图1-2所示,本发明提供了一种压电层合梁的维稳增效参数优化方法,包括以下步骤:
[0046]
步骤s1、对压电层合梁自由度进行静态分析,获取由单元刚度矩阵和单元质量矩阵表示的合梁运动方程,根据所述合梁运动方程分析不同边界条件下压电层合梁的自由振动频率;
[0047]
步骤s2、根据所述压电层合梁的自由振动频率推导压电层合梁的动力响应模型,采用线性二次型高斯最优控制策略控制压电层合梁反馈增益位移矩阵及控制电压矩阵;
[0048]
步骤s3、结合压电层两侧入射振动波及所述控制电压矩阵形成波向量,以反馈控制策略主动控制压电层合梁局部振动。
[0049]
所述步骤s1中,将压电层合梁以自由振动模式建立空间直角坐标系,采用hamilton算法得到基于单元刚度矩阵和单元质量矩阵的合梁运动方程,将所述压电层合梁的振动波长设置为四个单元,计算所述压电层合梁的自由振动频率,其表示式为:
[0050][0051]
其中,e表示压电层合梁的弹性模量,m表示压电层合梁的单位长度质量,i表示压电层合梁的截面转动惯量,l表示压电层合梁的长度。
[0052]
本实施例中,所述hamilton算法主要通过静态凝聚消除电学自由度,利用压电层合梁的单元动能获取所述单元刚度矩阵和单元质量矩阵,从而有效提高了计算效率。
[0053]
基于所述自由振动频率的不同边界条件将合梁上下压电层极化,测量压电层的模态频率,所述不同边界条件主要由压电层位置及压电层厚度进行调整。
[0054]
本实施例中,不同边界条件主要由三种,分别为压电层合梁一端固支一端自由、两端简支、两端固支的三种模式。
[0055]
本实施例中,为了减少压电层合梁单元质量矩阵存在的轴向速度和转动速度的耦合,通过将合梁上下压电层极化的方式降低影响。
[0056]
所述步骤s2中,通过直接积分法对压电层合梁的频率方程直接进行逐步数值积分建立所述动力响应模型,对所述动力响应模型的目标函数采用线性二次型高斯最优控制策略获取目标函数最小值,所述线性二次型高斯最优控制策略具体步骤如下:
[0057]
步骤s201、将所述动力响应模型的目标函数作为状态变量和压电层输入矢量的加权平方,作为压电层合梁的控制状态调节器j,所述控制状态调节器j的表达式为:
[0058][0059]
其中,q
x
表示状态权系数矩阵,x(t)表示动力响应模型在t时刻的输入值矩阵,x
t
(t)表示动力响应模型在t时刻的输入值矩阵的转置,r表示控制权系数矩阵,μ
φ
(t)表示目标函数在t时刻的最小值矩阵,表示目标函数在t时刻的最小值矩阵的转置;
[0060]
本实施例中,采用线性二次型高斯最优控制策略,在压电材料正压电效应下,粘贴在层合结构表面的传感层在基体层的振动下产生感应电荷,反馈控制将传感层的输出电压或其变化率通过适当的电路进行放大增益后,通过闭环控制算法将放大器的输出电压反馈到致动层,致动层通过逆压电效应产生控制力,对振动进行抑制,控制效果与增益系数相关。
[0061]
步骤s202、设置所述动力响应模型初值x(0)作为最优致动输入,依据所述控制状态调节器j获取所有控制状态信息,采用线性二次型高斯最优控制构建状态观测器,实时监测系统的控制状态向量和控制输出,将控制输出作为位移矩阵;
[0062]
步骤s203、根据监测数据实时计算控制状态的估计值与实际值的最小方差,获取最优状态估计值作为控制电压矩阵。
[0063]
本实施例中,所述动力响应模型主要反映前几阶的低阶振型,振动控制主要目的是消耗掉前几阶模态的振动能量,以避免对局部振动的精度测量。
[0064]
本实施例中,主要通过使目标函数最小化,从而得到最优控制增益。
[0065]
本实施例中,采用控制状态调节器j监测系统的所有状态,减少系统噪声部分输出信息对系统测算精度的影响,提高了系统的稳定性。
[0066]
所述步骤s202中,将所述位移矩阵作为二次型性能指标函数的优化目标函数,通过控制加权矩阵获取最优的状态反馈控制,通过遗传算法优化所述控制加权矩阵,其构造步骤为:
[0067]
步骤s2021、采用二进制编码形式将控制加权矩阵的分量表示为二进制串,定义优化参数区间,获取字符串长度;
[0068]
步骤s2022、依据所述动力响应模型的输出信息作为初始种群,通过目标函数求解控制状态调节器j的最小值,并将适应度函数选择为目标函数的倒数;
[0069]
步骤s2023、选取小于适应度值的种群粒子作为最优适应度个体,获取最优控制制动电压矩阵。
[0070]
本实施例中,采用遗传算法维持在算法迭代的过程中群体中个体的多样性,从而避免群体在进化后期过早收敛,实现了基于主动控制的全局搜索以及局部搜索能力,将群体中适应度较低的个体逐渐淘汰,而具有较高适应度的个体得以生存且最终集中在所求问题的最优点附件。
[0071]
所述步骤s3中,将压电片两侧的入射波用作反馈状态变量获取反馈电压矩阵,采用负反馈系数对反馈电压矩阵做映射处理获取整个压电片的正反向等效透射和反射矩阵,并计算压电层合梁非连续特征处的振动波。
[0072]
所述负反馈系数根据外部给压电层施加化的电压幅值以及相位值来设定。
[0073]
将所述振动波以电荷量的形式在压电层及控制器之间建立电压联系,所述压电层及控制器之间的电压表示式为:
[0074]uio
=k
io
e-t(β+ωτ)usio
[0075]
其中,k
io
表示反馈增益,β表示相位,ω表示角频率,τ表示时间滞后值,u
sio
表示反
馈电压矩阵变量,t表示时刻。
[0076]
所述反馈增益k
io
表示所述振动波在0.1m范围内振幅响应的模之和。
[0077]
本实施例中,通过将传感器电压反馈给执行器,利用压电片两侧入射振动波为反馈量设计控制电压结合波向量法实现振动能量透射量以及传递方向调控从而实现局部振动控制。
[0078]
一种根据权利要求1-9任一项所述的压电层合梁的维稳增效参数优化方法的系统,包括:压电作动器1、数据分析模块2、反馈控制模块3、控制评估模块4以及稳态仿真模块5;
[0079]
所述压电作动器1,用于采集所述压电层合梁表面压电陶瓷片的振动信号及电压信号;
[0080]
所述数据分析模块2,用于分析振动信号及电压信号的振动效应以反馈控制局部振动;
[0081]
所述反馈控制模块3,用于分析压电层存在激励源时压电层局部的振动效应,通过将部分传递至合梁上局部区域的振动能量反射回激励处,以抵消部分的振动能量实现局部振动控制;
[0082]
所述控制评估模块4,用于评价所述最优控制制动电压矩阵获取目标函数最小值;
[0083]
所述稳态仿真模块5,用于仿真分析稳态参数控制结果。
[0084]
本实施例中,压电作动器1可以实时检测合梁结构振动,利用所述线性二次型高斯最优控制策略对检测到的信号进行处理,通过反馈控制模块3对结构施加一定的主动控制力,实现了振动控制,且具有比较高的灵活度、可控性以及精度。
[0085]
本发明通过对复合材料压电层合梁进行数值分析获得高精度压电层合梁单元,构建合梁运动方程计算不同边界条件下压电层合梁的自由振动频率,有效提高了压电层合梁单元在动力学分析中的准确性与高效性,且建立动力响应模型算法相对简单,采用线性二次型高斯最优控制策略实现了压电层合梁的振动主动控制,根据动力响应模型的目标函数采用基于遗传算法对线性二次型高斯控制中的加权矩阵进行优化,使其控制效果能够满足压电层合结构振动主动控制要求,减少了控制系统的时滞,确保了作动器与传感器之间的完美配置,提高了系统的稳定性。
[0086]
以上实施例仅为本技术的示例性实施例,不用于限制本技术,本技术的保护范围由权利要求书限定。本领域技术人员可以在本技术的实质和保护范围内,对本技术做出各种修改或等同替换,这种修改或等同替换也应视为落在本技术的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1