1.本发明涉及一种基于最小熵的固定模式噪声去除方法,属于可见光图像处理领域。
背景技术:2.受加工工艺限制,成像探测器中广泛存在像元间的不均匀,这会导致在最终的成像中存在固定模式噪声。所谓的固定模式噪声可以认为是一种特殊的“噪声”。对于给定的一个探测器来说,这种“噪声”的模式是固定不变的,强度随环境温度和曝光时间变化(关于固定模式噪声的详细介绍,见european machine vision association.standard for characterization of image sensors and cameras[j].emva standard,2010,1288)。
[0003]
固定模式噪声的存在极大地限制了相机在暗光下成像的能力。不同于常见的随机噪声,固定模式噪声在一次曝光内是基本恒定的,所以在一次曝光中固定模式噪声会随信号一起以相同的速度累积。增加曝光时间只会同时放大信号和噪声,不会提高最终图像的信噪比。在暗光条件下,场景的辐射强度比较低,所以最终的成像会被固定模式噪声严重污染。
[0004]
现有的图像去噪方法在处理固定模式噪声时很难有好的表现。这是因为固定模式噪声往往伴随“过热像元”同时出现,这些“过热像元”导致固定模式噪声的分布函数是长尾的,不符合一般的高斯噪声假设。另外,因为加工工艺的缺陷,固定模式噪声在空间上往往存在低频的、不规则的变化,这导致固定模式噪声通常是非平稳的,不符合独立同分布的假设。非高斯、非平稳噪声的去除到目前为止依然是一个巨大的挑战。
技术实现要素:[0005]
针对现有图像降噪方法在处理固定模式噪声时的不足,本发明旨在提供一种基于最小熵的固定模式噪声去除方法,达到去除图像中固定模式噪声的目的。
[0006]
为达到以上目的,本发明采用以下技术方案:
[0007]
本发明公开的一种基于最小熵的固定模式噪声去除方法,基于探测器噪声的物理特性,将固定模式噪声建模为噪声模式和一尺度参数的乘积,有效处理非高斯、非平稳的噪声;然后利用最小熵原理自动估计尺度参数,保证估计的优良性。从带噪声的图像中减去被尺度参数缩放后的噪声模式之后,得到去噪后的图像,达到有效去除图像中的固定模式噪声的目的。
[0008]
本发明公开的一种基于最小熵的固定模式噪声去除方法,包含以下步骤:
[0009]
步骤一:通过暗场标定得到噪声模式f。
[0010]
所述f为一m
×
n矩阵,其中m为图像高度,n为图像宽度。具体的标定方式为:在暗室中,将相机镜头盖盖上,然后采集图像,采集到的图像即为噪声模式f。为了抑制随机噪声,采集多张图像,然后平均,最终得到噪声模式f。
[0011]
步骤二:读取带噪声的图像y,图像y为一m
×
n矩阵。
[0012]
步骤三:初始化尺度参数α=0。
[0013]
步骤四:定义辅助变量z。
[0014]
所述辅助变量z的定义为
[0015]
z=y-α
·
f,
ꢀꢀꢀꢀ
(1)
[0016]
显然z也为一m
×
n矩阵。
[0017]
步骤五:更新α。
[0018]
所述α按如下方式进行更新
[0019][0020]
式中δ为一实数,控制梯度下降的步长,取值反比于噪声模式的标准差;g(α)为z的熵。
[0021]
步骤六:重复步骤四-五,直到α收敛。
[0022]
记步骤五更新前的尺度参数为α
old
,更新后的尺度参数为α
new
,α收敛的判据为|α
new-α
old
|《∈,其中∈为一小量。
[0023]
步骤七:减去固定模式噪声得到去噪后的图像x,达到去除图像中固定模式噪声的目的。
[0024]
所述x由下式计算得到
[0025]
x=y-α
·
f,
ꢀꢀꢀꢀ
(3)
[0026]
显然,x也为一个m
×
n矩阵。
[0027]
有益效果:
[0028]
1、本发明公开的一种基于最小熵的固定模式噪声去除方法,将固定模式噪声建模为标定得到的噪声模式与一尺度参数的乘积,能够有效处理非高斯、非平稳的噪声。
[0029]
2、本发明公开的一种基于最小熵的固定模式噪声去除方法,使用熵最小化方法估计未知的尺度参数,保证估计的优良性。
[0030]
3、本发明公开的一种基于最小熵的固定模式噪声去除方法,在实现有益效果1、2的基础上,能够有效去除图像中的固定模式噪声,极大改善暗光条件下成像的质量。
附图说明
[0031]
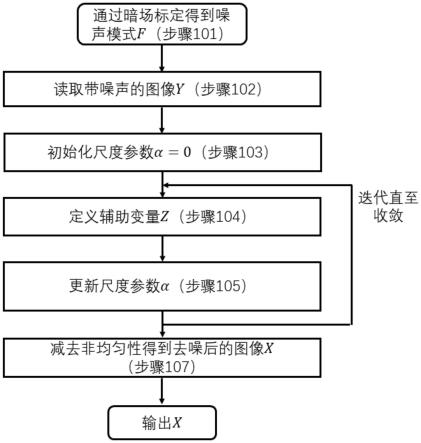
图1是本发明公开的一种基于最小熵原理的固定模式噪声去除方法的流程图。
[0032]
图2是使用本发明固定模式噪声去除方法去噪前后图像视觉质量对比。
[0033]
其中(a)(c)为去除固定模式噪声之前的图像;(b)(d)为去除固定模式噪声之后的图像。
具体实施方式
[0034]
下面将结合附图和实施例对本发明加以详细说明。同时也叙述了本发明技术方案解决的技术问题及有益效果,需要指出的是,所描述的实施例仅旨在便于对本发明的理解,而对其不起任何限定作用。
[0035]
实施例1:
[0036]
本实施例公开的一种基于最小熵的固定模式噪声去除方法,针对现有图像去噪方
法在处理固定模式噪声方面的不足。本实验的硬件测试条件为:inter i7 6700,8g ram,matlab 2016a;所用的相机为pointgrey灰度相机,曝光时间设置为300ms。δ设置为0.1。
[0037]
本实施例首先将固定模式噪声建模为噪声模式和一尺度参数的乘积,然后利用最小熵原理自动估计尺度参数。从带噪声图像中减去被尺度参数缩放后的噪声模式即可有效去除固定模式噪声。本实施例的流程图如图1所示。
[0038]
本实施例公开的一种基于最小熵原理的固定模式噪声去除方法,包含以下步骤:
[0039]
步骤一:通过暗场标定得到噪声模式f。
[0040]
所述f为一512
×
640矩阵,其中512为图像高度,640为图像宽度。具体的标定方式为:在暗室中,将相机镜头盖盖上,然后采集图像,采集到的图像即为噪声模式f。为了抑制随机噪声,采集100张图像,然后平均,最终得到噪声模式f。
[0041]
步骤二:读取带噪声的图像y。
[0042]
所述y代表带噪声的图像,为一512
×
640矩阵。
[0043]
步骤三:初始化尺度参数α=0。
[0044]
步骤四:定义辅助变量z。
[0045]
所述辅助变量z的定义为
[0046]
z=y-α
·
f,
ꢀꢀꢀꢀ
(1)
[0047]
显然z也为一512
×
640矩阵。
[0048]
步骤五:更新α。
[0049]
所述α按如下方式进行更新
[0050][0051]
式中δ为一实数,控制梯度下降的步长,在本实施例中取为0.1;g(α)为z的熵。实际使用中g(α)可以使用z的各阶累积量进行近似:
[0052][0053]
其中
[0054]
k2=m2,k3=m3,
[0055][0056][0057][0058]
其中z(i,j)表示z的第i行、第j列元素。
[0059]
步骤六:重复步骤四、五,直到α收敛。
[0060]
记步骤五更新前的尺度参数为α
old
,更新后的尺度参数为α
new
,α收敛的判据为|
α
new-α
old
|《10-3
。
[0061]
步骤七:减去固定模式噪声得到去噪后的图像x,达到去除图像中固定模式噪声的目的。
[0062]
所述x由下式计算得到
[0063]
x=y-α
·
f,
ꢀꢀꢀꢀ
(3)
[0064]
显然,x也为一个512
×
640矩阵。
[0065]
为了说明本发明的有效性,比较使用本发明固定模式噪声去除方法去噪前后图像视觉质量。
[0066]
图2展示了使用本发明固定模式噪声去除方法去噪前后图像视觉质量对比。从图中可以看出,本发明固定模式噪声去除方法可以有效去除图像中的固定模式噪声,极大地改善了图像质量,具有较高的应用价值。
[0067]
以上所述的具体描述,对发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施例而已,并不用于限定本发明的保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。